Curiosity Mars Rover
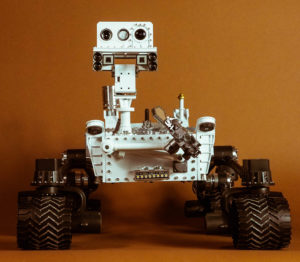
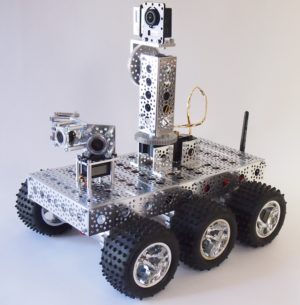
We are excited to share our latest and most ambitious robot, the Curiosity Mars Rover. This is a highly-interactive, 1/10th scale functional replica of the NASA Curiosity Mars Rover. This project was ambitious for us in two main ways: First, we worked…
Sojourner Mars Rover

We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first robot to operate on an different planet. Like the real Sojourner, our little robot includes six wheels, rotational servo steering, a fully-functional rocker-bogie…
Testing the Lunar Rover at the Asheville Museum of Science

In this video, we’re taking the Lunar Rover on a quick visit to the Asheville Museum of Science (AMOS) to test it out in a new environment.
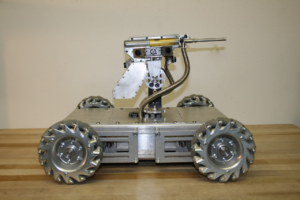
Challenger Rover

We have built a sturdy but compact 6-wheel-drive (6WD) rover for museum exhibits with limited space. In this video, we are testing its various steering methods (strafing, rotation, 2WS, differential, etc.). The main plate of this robot is a custom part that…
Lunar Rover
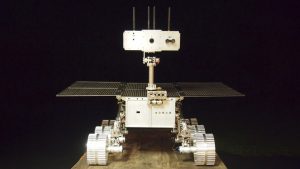
We’ve been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its “Stored Position”. When instructed to do so, the robot folds down its mast and stores it beneath the robot. The…
Lunar Rover Solar Panels
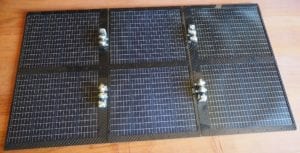
We have been working on the solar top for the Lunar Rover. The rover will use six 15.4V PowerFilm solar panels (PT15-300) to generate a total of 1.2 Amps @ 15.4V, which will be used to charge the 3-cell 12V lithium-ion battery….
We’re building a Lunar Rover !

SpaceLS, a rocket company in the UK, has asked Beatty Robotics to team up with them to pursue a mission to put a rover on the moon. The first step in the process is for Beatty Robotics to design and construct a prototype…
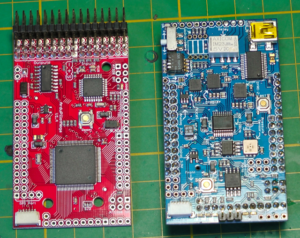
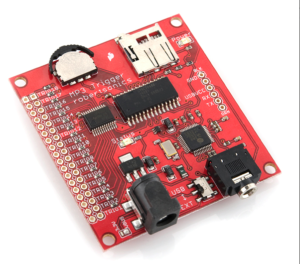
Using the SOMO-II MP3 Module with Arduino

We often add sound effects and even music to our robots. We’ve used a number of approaches, but our latest method is the SOMO-II MP3 Module. Here are some pictures (from a rover robot we’re working on) and the technical details of how…
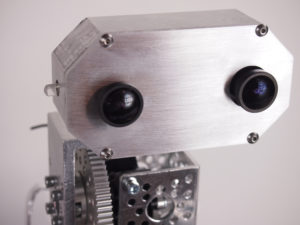
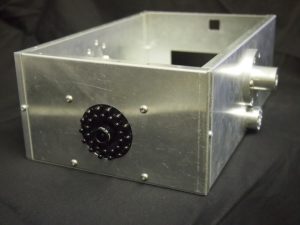
Machining a Custom Case for GoPro Camera

We are in the process of mounting a GoPro camera onto our latest robot. In our previous post we showed how we hacked into the GoPro and wired it up so that we could control it from the robot’s Arduino microcontroller. The…
Hacking a GoPro for Wired Remote Control

Sometimes there are situations where it’s useful to control a GoPro by wired remote control and/or to integrate a GoPro into a DIY electronic project. This seems like it should be straight forward, but it’s not. I searched for a third party…
LIDAR Laser Scanner Turret
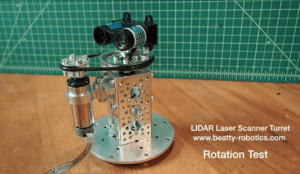
Recently, we encountered a new type of sensor that we’re hoping will really help our robots sense the world around them. We are avid users of Maxbotix ultrasonic sensors to detect objects, but they point in a single direction and only provide…
Rover Challenge – Work-in-Progress

We’ve been working on the Rover Challenge robot for the New York Hall of Science. Its purpose is to give Science Center visitors a chance to drive a robot through an obstacle course, use ultrasonic and color sensors, record video, take snapshots,…
Custom-machined Main Plate for our newest rover
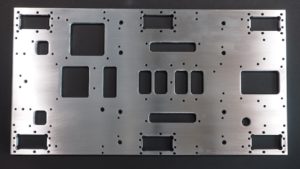
Today, we completed an important part of our new Rover Challenge robot for the New York Hall of Science. The central focus of this robot’s design is the Main Plate. This is an intricate aluminum part that we designed on the CAD…
Snailbot Work-in-process

Snailbot is one of my favorite pet projects. 🙂 The idea is to build a robot inspired from a biological creature, in this case, a snail. The first challenge was to design and wire-up the electronics so that they would fit inside…
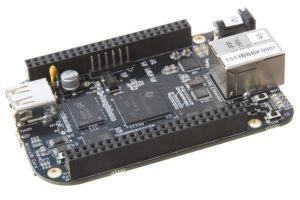
Electronics for a museum exhibit
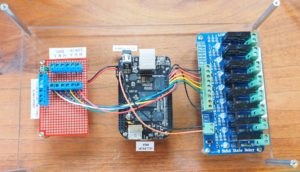
We are working on the electronics for a hands-on museum exhibit that tests reaction time and shows how you can improve their reaction time through practice. The main components of the control unit are a BeagleBone Black, an 8-Channel Relay Board (to…
Machining a Wheel Hub
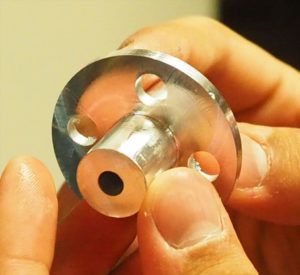
We need six special hubs to attach some very unusual wheels to the 6mm motor shafts on a new robot we’re building. There was nothing commercially available for what we needed, so we designed the hub on the CAD system and we’ve…
Building a new rover
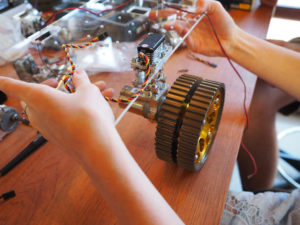
We have taken on a new project to build a compact rover for the New York Hall of Science, something that visitors can drive around in the corridors of the Science Center and that the staff can easily take to off-site activities…
Centurion Paintball Sentry Gun

The Centurion is an automatic-targeting paintball sentry gun. Its purpose is to guard a doorway, alleyway, or any open space. It watches an area with its camera. If it sees movement, it aims its guns at it and shoots at a high…
Beatty Robotics goes to the Dogs
Recently, we started work on a museum exhibit project that requires reading six sensors, controlling eight relays, and displaying text and graphics to a display monitor. Normally, we like using Arduino, but because of the display requirements of this project, we decided to…
Metalbot – Work-in-Process

We’ve been working on a fun new robot we call Metalbot. Our goal was to build an autonomous rover with a unibody design that was machined out of a single block of metal. We started with this 13” x 9” x 1.75”…
Our New Vertical CNC Mill
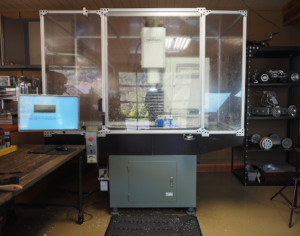
At Beatty Robotics, we’ve made good use of our gantry-style CNC mill over the last few years. We’ve built all our robots to date with it. Recently we decided to augment our machining capability with a vertical CNC mill. Our current mill…
Mini CAD System

At Beatty Robotics, we love building custom computers. Our latest computer project is a “Mini CAD System” for doing Computer Aided Design. Our goal was to build a small, but very powerful computer for running Solidworks and our CAM software HSMWorks. The…
Kuala Lumpur Mini Mars Rovers

We have just completed and shipped two new Mini Mars Rover exhibits to Petrosains, The Discovery Centre in Kuala Lumpur City Centre. Although very small in size, these little robots pack some excellent features. They have a simplified, CNC-machined rocker-bogie suspension system,…
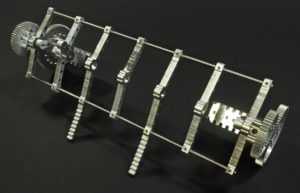
Alumini
https://vimeo.com/104241178 We would like to introduce you to our newest robot. Her name is Alumini, which is pronounced Ah-lu-min-ee. She’s a 12-legged running creature. She’s made out of custom, CNC-machined aluminum components designed to be like vertebrae and bones in keeping with…
Laser Tank base – work-in-process
We are working on a tank with treads and a laser cannon gun turret. It’s a complex, long-term project with lots of CNC-machined parts as well a a variety of purchased components, but we’ve been making good progress on it. Today’s posting will…
A Miniature Robot Control System

Recently, we encountered a situation where we needed a very small Arduino microcontroller and motor driver. On Alumini, our 12-legged walking robot, there won’t be an electronics box, so we will be integrating the electronics into the bones of the creature. Our…
The Beatty Ladies Working in the Workshop

We’ve been hard at work on several simultaneous on-going projects, including an upgrade to our large Mars Rover, the building of two new Mini Mars Rovers for two science centers in Kuala Lumpur (The National Science Centre and Petrosains, the Discovery Centre),…
Alumini (Baby Aluminalis)
We had good success with our 16-legged walking creature Aluminalis, so we decided to use what we learned and build a new walking creature. We plan for this to be a much smaller, faster, and more agile little beastie. We call her…
A Counter-rotating Differential

Back in November of 2011 we posted an article about our first Spirit II Mars Rover. Among other things, that rover included a counter-rotating differential (or universal joint) integrated into its rocker-bogie suspension system. If the front wheel on the left side of the…
Beatty Robotics at the White House

In 2014, President Obama invited us to the White House! It was amazing to walk into the White House and set up our robots in the Grand Foyer. The President and many others came through to talk with us and see our…
Soldering the Mars Rover Shield
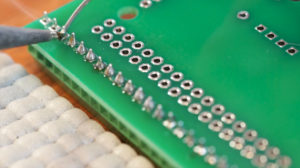
We are in the process of upgrading the first Mars Rover that we built for the New York Hall of Science. The goal is to upgrade its electronics so that the museum’s two rovers are identical and interchangeable. Here is a very…
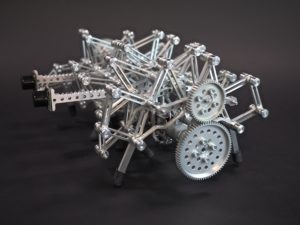
Aluminalis

We are happy to announce the birth of our latest creation, Aluminalis, a sixteen-legged walking creature. Along with her sixteen legs and feet, Aluminalis has a fast and lively brain (an Arduino Nano), strong muscles (gear motors), elegant bones (custom machined aluminum linkages), two…
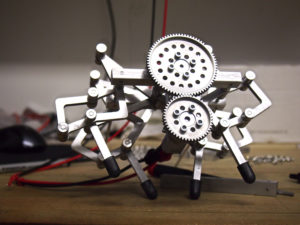
Aluminalis Crankshaft

One of the funnest, but most challenging parts of building Aluminalis (our 16-legged walking robot) has been the construction of the two crankshafts. Each side of the robot has a motor that rotates a 10” long, multi-link crankshaft, which drives 4 pairs…
Zeroing a CNC

We enjoy machining custom aluminum robot parts on our CNC Mill. One of the best things about a CNC is that it can cut precise parts by following the geometry of a CAD drawing. We measure the precision and repeatability of our…
Aluminalis Kinetic Test

We have been working on Aluminalis, our mechanical sixteen-legged walking robot. We’ve completed the initial build of the left side, which includes eight of the legs. Aluminalis is made with a complex assembly of custom linkages, segments, and shafts that we have…
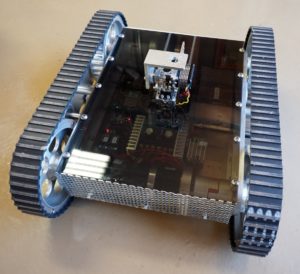
Mounting the HackHD camera on the Actobot Rover
A little while ago, we discovered a cool new high definition video camera called the Hack HD. Think of it as the internal circuit board and camera lens of a 1080P GoPro camera, but unlike a GoPro, it’s designed to be hacked…
A small computer for a robot

As you know, we usually use Arduino microcontrollers on our robots. But in some cases, an Arduino doesn’t have enough power to do what we need to do. We are currently working on a new project that requires advanced image processing for…
Aluminalis Work-in-Progress
Aluminalis is a 16-legged walking robot that we are designing and building out of custom aluminum linkages and crankshafts. We will provide much more detail about the design, name, and behavior of this little creature as we go along, but for now,…
Beatty Robotics receives Editor’s Choice Award at World MakerFaire 2013
We exhibited the Mars Rover at the 2013 World MakerFaire in New York. There were 650 maker exhibits and more than 85,000 attendees. Beatty Robotics was deeply honored to receive the MAKE Editor’s Choice Award (Blue Ribbon) for our Mars Rover project. We also…

Our new Mars Rover Arduino Shield
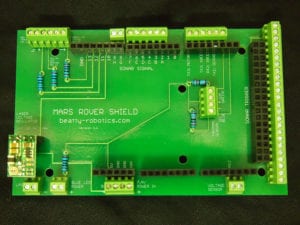
Recently, we were asked to build a second Mars Rover for the New York Hall of Science. The idea is to have a backup for the first one, and also to have a rover that can be taken off site for demonstrations….
Mini Mars Rover
Recently we were asked to build a miniature Mars Rover for a new space museum in the Czech Republic. Although the Mini Mars Rover is only about 8″ long, it is a functional robot, including an Arduino Nano microcontroller, a high-resolution wifi…

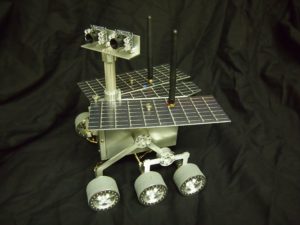
Mars Rover

We have exciting news to share. A short time ago the New York Hall of Science contacted us. They have a large and beautiful Mars exhibit, but their existing robot is outdated and needs to be replaced. After some discussion about their…
Mars Rover – Motion Test Video
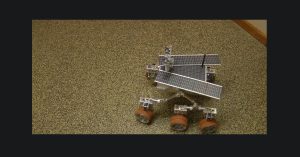
In the video below we have documented our first “basic motion test” on the new Mars Rover. Using our radio-based handheld remote control, we are testing the forward, backward, and rotation of the robot to make sure that it moves smoothly and…
Mars Rover – Adding the Targeting Laser and Thermal Array Sensor
A few subscribers have asked about laser and the thermal array sensor on the new Mars Rover, so this post is dedicated to that: We needed to add a targeting laser and a thermal array sensor to the Mars Rover robot, so…
Mars Rover – Mast and Solar Panels

We’ve been busy working on the new Mars Rover. Over the last few days we’ve been focused on the chassis, the thin-film solar panels for the top, the mast, and aligning the servos for steering. Pics below.

Mars Rover – Infrared Detection

The Mars Rover needs to detect infrared in its camera so that visitors can identify infrared-emitting rocks that are hidden in various spots in the Mars Exhibit. We have completed a series of experiments to confirm that this part of the Rover…
Making progress on the Mars Rover

We’ve been making good progress on the Mars Rover. Today, we used our new milling machine to put the finishing touches on the hubs we are using to mount the central chassis shaft to the rover’s main box. By completing the two…
Mars Rover – Electronics

A number of folks asked to see an updated picture of the Mars Rover electronics. This picture shows the top most electronics plate where most of the components are mounted. There are also electronics beneath the main electronics plate, including the laser,…
Major milestones reached on the Mars Rover

We’ve been making great progress on our new Mars Rover. We’ve posted some pics below.
Using CNC to machine the electronics plate for Mars Rover

Here we are using our homemade CNC to machine a custom electronics plate for the new Mars Rover we’re building. The robot’s circuit boards and electronic components are mounted onto this plate, which is then mounted inside the robot’s main box. Check…
Cutting metal for the Mars Rover 2
We are working everyday on the new Mars Rover. The work is going so fast that it’s hard to remember to take pictures, but here are some of the pics we snap along the way.

A fine new tool in the workshop

Like many people, I love good quality tools. One of the most important tools we have in our workshop is a mini table saw with a 4″-diameter blade. We use it all the time, on pretty much every project we build. Occasionally,…
Working on glass

After watching a glass worker in the River Arts District in Asheville, I decided to try my hand. We already had a torch for heat shrinking wires, and the safety gear, so she bought some glass stock and other supplies and went…
Machining CNC parts for the telegraph
Today, we worked on the wireless telegraph project. We decided to mount the electronics on brass and copper plates, so we designed the parts on the CAD system and then machined the parts on our home made CNC mill (one of our…
Working on wireless telegraph

Here at Beatty Robotics, we have a keen interest in mixing cool, old technology with exciting new technology. Recently, we became interested in Morse Code and telegraph equipment. We began exchanging written secret messages in Morse Code. And then we continued on…
Working on the CNC

Up to this time, we’ve been using hand tools to build our robots. But over the last few months, we’ve been working on building a Computer Numerical Control Machine (CNC) that will allow us to precisely cut, drill, and machine aluminum, brass,…

Update on Steampunk Necklace

Subscribers: Earlier today we added a post announcing our Steampunk Necklace is now for sale. As usual, this posting was automatically emailed to all subscribers just like any other new post, but it was a bit misleading because the “Buy Now” button…
The beginning of KitBot

We have had a number of friends and family members ask how they can get started in robotics. They are interested in building a robot, especially a vehicle of some sort, but they don’t know where to begin. So, we have been…
Spirit II – Mars Rover: INSIDE VIEW

Several readers have requested an inside view of our Spirit II – Mars Rover so that they can see what the electronics look like. We have provided an annotated picture below, along with a couple of external shots. For more details and…
Steampunk Necklace

I made this steampunk necklace. The gears, cogs, machine screw, nut, and chain are made out of copper, bronze, steel, and brass. The main round part with little hobnails on it is bronze plated pewter. The little gears and cogs in the…
Black Dragon

Today, we would like to introduce Black Dragon, our newest flying robot quadrotor. This newest flyer incorporates everything we’ve learned to date about ease-of-use, modular maintainability, crash resistance, lightness, and safety. While we constructed all our previous full-sized quadrotors with aluminum, we…
A miniature power distribution unit (PDU)

Over the weekend, we built a small Power Distribution Unit for a new robot. We hacked a male Deans connector (which will plug into a high-amp LIPO battery), then soldered it into a marine toggle switch, then screwed it into a device…
Mini Quad Upgrade

Today, we upgraded our little mini quad rotor flying drone that we call “The Black Hornet.” We replaced his main board, installed new propellers, re-fixtured his motor mounts, and got him in good flying shape. He flew steady and strong in our test…
Mechatronic Tank
We would like to introduce Mechatron, our mechatronic tank. When we designed and built Mechatron we wanted him to be tough looking, industrial, and retro-futuristic, with lots of metal, rivets, and gears. He’s built entirely out of aluminum, brass, and steel, but…
Soldering Circuit Boards
My sister Genevieve is an expert solderer. Her hands are small, steady, and well practiced. Here is a picture of her soldering a voltage regulator for our Spirit II Mars Rover project. Here is a one minute video of Genevieve soldering the header…
Remote Control

We have been hard at work on our latest project called Mechatron. To control our Mechatron robot as well as our Mars Rover, we designed and built our own remote control box. We developed our own communication protocol for transmitting commands from…
Security Robot

Security V is a small security robot. It’s equipped with the following capabilities: Automatic electric gun (Airsoft pellet gun) with ammunition cage Pan-Tilt Gun Turret Targeting laser FPV Camera (3) Ping sensors for object avoidance LED Light Strips MP3 Sound Player IR…
Creepy Crawler Robot

Having created several robots that roll on wheels of various kinds, we decided to build a robot that walks, or more accurately, crawls, in a spider-like fashion. We call him Creepy Crawler. We control this robot using a PS/2 remote control. Each leg…
All-Terrain GPS Robot
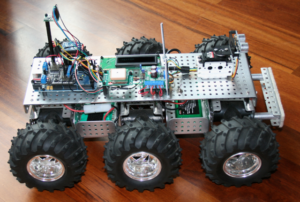
After building a number of indoor robots, we decided to build an outdoor robot capable of traveling through rough terrain. We call it “Trekker.” First, we put together a six-wheel independent suspension with a separate motor on each wheel and large knobby…
Blinky Belt

When we were ordering some parts for our Mechatron robot and we discovered a cool strip of LED lights that worked based on “RGB,” which stands for Red-Green-Blue. These are special LED lights that you can program to whatever color you want by…
Talking Robots!
We flipped on the power switch for our robot named Security. Then a low rumble erupted from somewhere in the room. The song Mr. Roboto began to play and the robot danced, moving back and forth, spinning and turning, playing its lights–all…
Roam-Bot, A Bot On His Own
When I first saw Roam-bot I thought he was pretty cool. He talked (at this time we had no talking robots) and he had a aluminum box that hides all of his wires. He was neat, and could go by himself using…
Stirling Engine
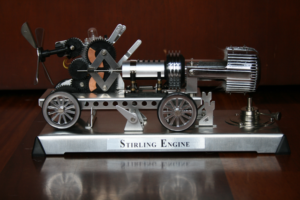
We built this cool Stirling Engine from a Japanese kit. The instructions were in Japanese so we had to use the pictures and what made sense. It was so much fun!
Solar Power System

We’ve been working on the power system for our Spirit II Mars Rover, which, like the real Spirit robot on Mars, will be solar powered. We plan to use four small solar panels. Each one is about 7″ x 9″ and delivers about…
Chassis for Mars Rover

We have been working hard on the rocker-bogie suspension system for the Spirit II, our Mars Rover. In this picture, the front wheel will be attached on the left side. The two back wheels will be attached on the right side. The…
Differential for Mars Rover
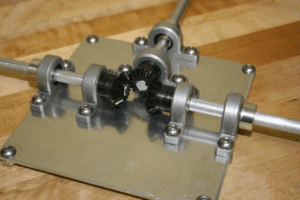
We are currently building a rover similar to the Mars Rovers Spirit and Opportunity, which we have always loved (but have been way outside our skillset in the past). We have been studying the details of the rovers, their electrical systems, chassis,…
Telepresence Robot

This is Telegance. He is a Telepresence Robot, which means he’s a driver-controlled mobile video conferencing system. Imagine I’m out in the world. I can use my laptop or any other computer to link into the robot through the Internet. The people…
Mini Flying Drone
After building our first Arduino-based flying drone robot, we decided to take what we learned and build a tiny quadrotor that was safe to fly indoors and out. We used the same electronics, but built the frame out of ABS sheet and…
Flying Robot Drone

We would like to introduce our flying drone robot. We can fly this robot using Remote Control or it can fly itself using sonar, an on-board GPS, and following longitude/latitude waypoints. We have experimented with various frame designs and electronics, so you’ll…
Our Retro Russian Vacuum Tube Clock
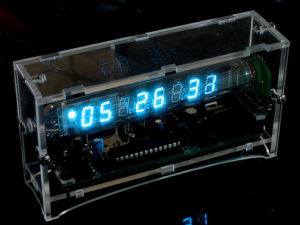
We decided to take a day out from the robots and build a super-cool “Ice Tube Clock Kit” from Adafruit. The kit came as several hundred little capacitors, transistors, microchips, and other components, which Genevieve soldered one by one into a little circuit…
Our Smallest Robots

We made these tiny-bots from the small, spare parts of their older brothers. Though not as high-tech as the larger ones, these little guys defiantly beat the record of being the smallest by a long shot. Their size makes it easy to put…
Our First Robot

For the story of our first little robot, I.C. 12, please visit the About Us page. OUR FIRST ROBOT: I.C. 12
