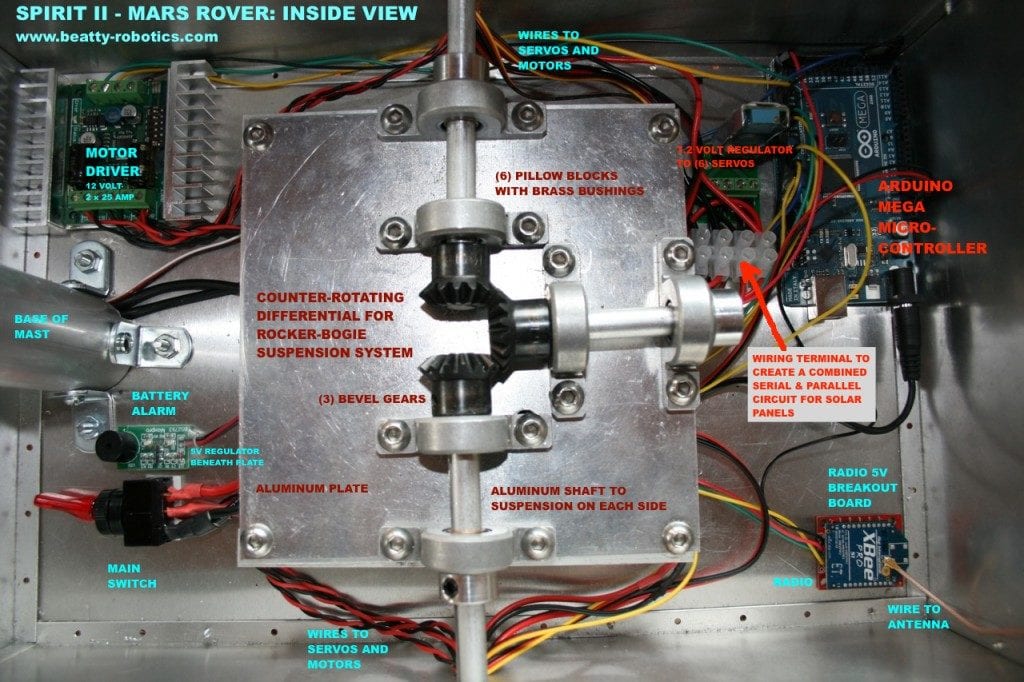
Several readers have requested an inside view of our Spirit II – Mars Rover so that they can see what the electronics look like. We have provided an annotated picture below, along with a couple of external shots.

Mars Rover – Side View

Mars Rover – Corner View
For more details and pictures of the Mars Rover, click here.

Hi, you have only one motor driver for all six wheel motors?
What kind is it? Good job on the build!
Ah, good question. That’s a 2 x 25 AMP controller, so it can control two sets of motors. There are six motors total, three on each side. The three motors on a side are all wired together, controlled together, and always traveling in the same direction. Note, this robot does not use differential drive like many other robots. Instead, the wheels at the four corners pivot on servos. A turn (actually rotation on center) is achieved by using the servos to rotate the four corner wheels 45 degrees. It’s hard to explain/visualize, but the video shows it in action. Note that the robot is either going straight or rotating, never both at the same time (we could program it so that it could, but we wanted it to work like the NASA rover). The Motor Control is made by Dimension Engineering, which we use for nearly all our land-based robots.
Would you like to sell it?
electromenagere dit :@frannso : je te le laisse, je rdneps la cafetie8re moi ;)@Sandra : Oh zut ! je voulais faire pareil !!@Lena : gourmande va ! 😉 (quel plaisir de te revoir)@Mam’Julie : t’es fache9e ? qu’est ce qui se passe ?
For the life of me I cannot figure something out. How does the square chassis of the robot not tip forward or backward when the weight shifts? There is only one contact point on each side. Is it just balanced perfectly 50/50 front to back? Or, is there another attachment point I can’t see?
Adam, the main box of the robot is connected to the shafts only via the universal joint (specifically the gears and bushings). There are no other connections. The robot is roughly balanced in weight front to back 50/50. However, the universal joint also keeps the robot generally balanced as well. Also, when one leg of the robot goes over an obstacle, the tilt of that leg is transferred to a corresponding opposite tilt force on the opposite side thereby averaging (reducing) the amount of front/back tilt (and it serves to apply positive force to the wheels still on the ground, which helps stability). It took me a long time to figure out how the NASA rocker bogie suspension system works, how to build the legs, where to put the rotating joints, how to handle the connection to the main robot box, and the importance of the counter-rotating universal joint. It’s definitely a weird beast (but fun and interesting). 🙂
Nice work. Do you mind sharing the part numbers for the miter gears and pillow blocks? McMaster has a wide variety but they are a bit expensive. Just curious if you have found a good source for these items. What did you use for the pieces that fit around the shaft behind the pillow block opposite the miter gears? Did you use a coupler or machine a part yourself? Is the shaft size ½ inch? And finally, did you machine the leg pipe joints or is that a off the shelf component?
Thanks. Here is some info that may help you:
1. Miter Gear from McMaster.com: 6843K11 Steel Finished Bore 20 Degree Angle Miter Gear, 16 Pitch, 16 Teeth, 1″ Pitch Diameter, 3/8″ Bore 2. I like using McMaster.com. I haven’t found any place better for this kind of thing. 3. That is a shaft collar with a set screw: 9946K13 Aluminum Set Screw Shaft Collar, 3/8″ Bore, 3/4″ Outside Diameter, 3/8″ Width 4. The shafts are 3/8″ in diameter. 5. We purchased the tube clamp, but that particular size is no longer available. You may want check out Servocity. Lots of awesome stuff there.