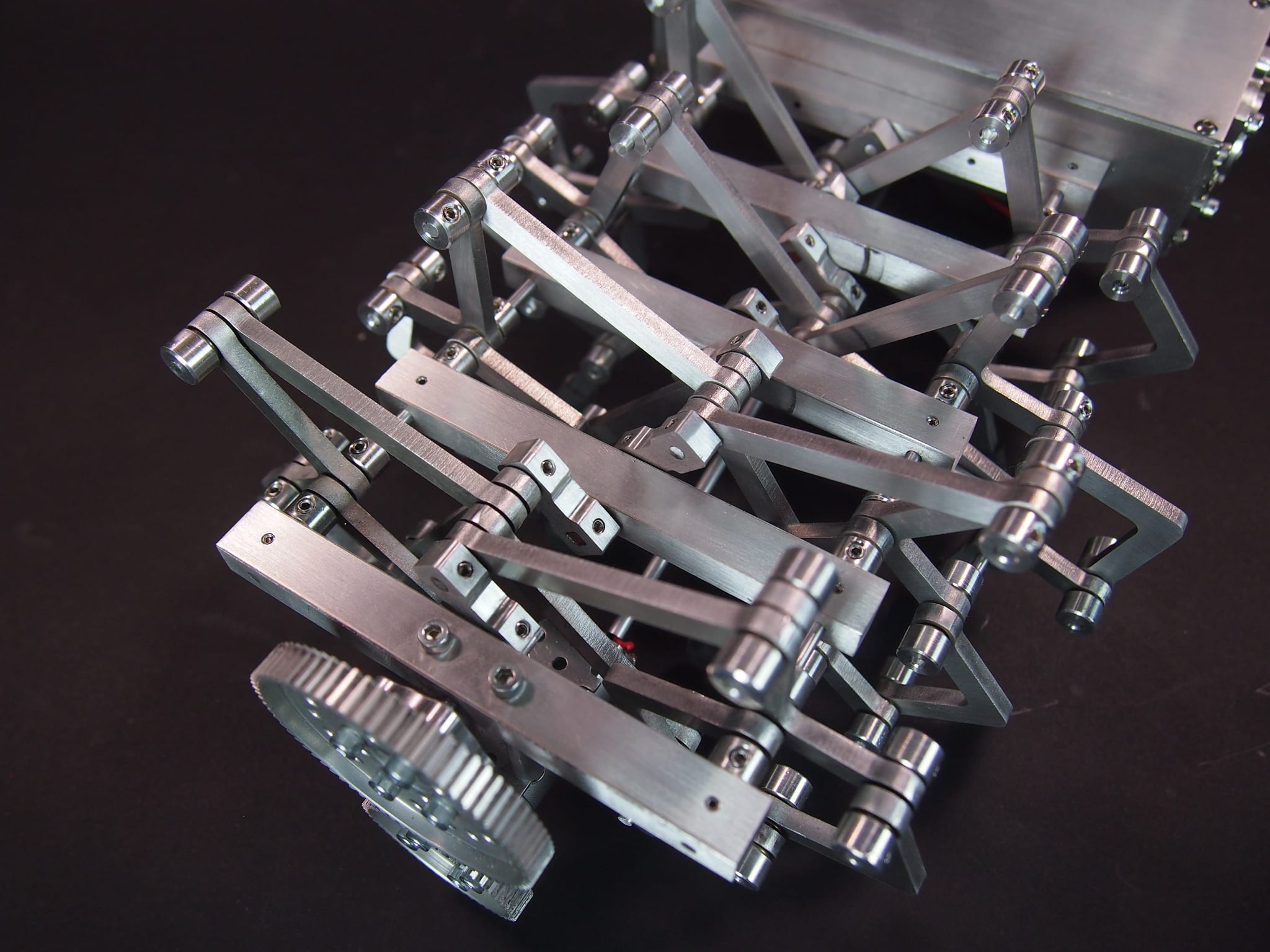
We have been working on Aluminalis, our mechanical sixteen-legged walking robot. We’ve completed the initial build of the left side, which includes eight of the legs. Aluminalis is made with a complex assembly of custom linkages, segments, and shafts that we have been making in our machine shop. A single motor drives all eight of the legs (on this side) via a crankshaft that drives each pair of legs 90-degree out of phase with the other three pairs. That way, one pair of legs will always be on the ground no matter how fast the robot is moving. In the video below, we are testing the kinetic motion and gait of the left side.
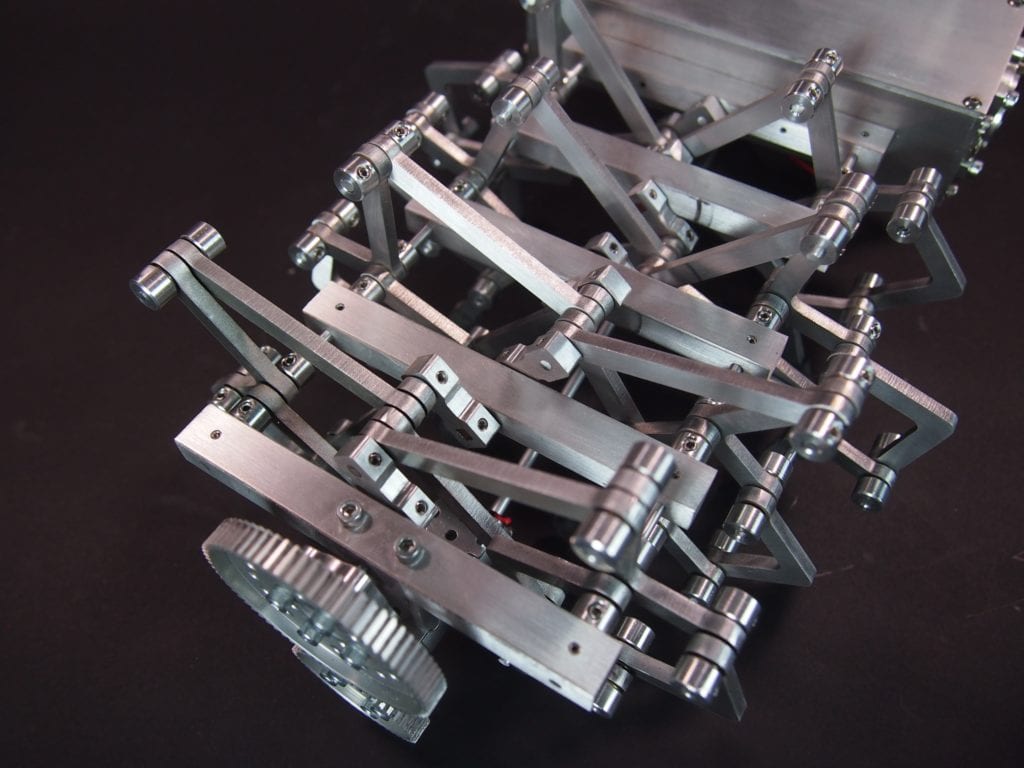

Thanks, Richard. Appreciate it. I’ll think about your suggestion. The five segment bars are held together by two very long 1/8″ diameter rods that hold everything together and provide the overall rigidity. The two shafts and the last segment are then attached to the thorax (middle) of the creature. One of the behaviors I’m seeing in these tests is that those rods are flexing quite a bit. They are made out of aluminum. They should probably be out of a stiff steel and they need to be attached firmly to the thorax. On the other hand, once the creature has two sides and is traveling across the ground, I’m not sure the flexing is going to be a problem. It may even be an advantage that there is a bit of flex/give in the chassis. Not sure. We’ll see. Side 2 is coming up next, along with ground tests.
Great Work!
This is looking really cool! Is it inspired Theo Jansen’s Strandbeest sculptures?
Jonathan: Yes, this is indeed inspired by Theo’s fantastic sculptures in the Netherlands. We named our creation Aluminalis Animaris, in honor of Theo’s species naming system. Once we have Aluminalis working (which will be soon now), we’re going to provide a video, lots of pictures, and a full write up that explains the background, the inspiration, and all the other details. —Camille