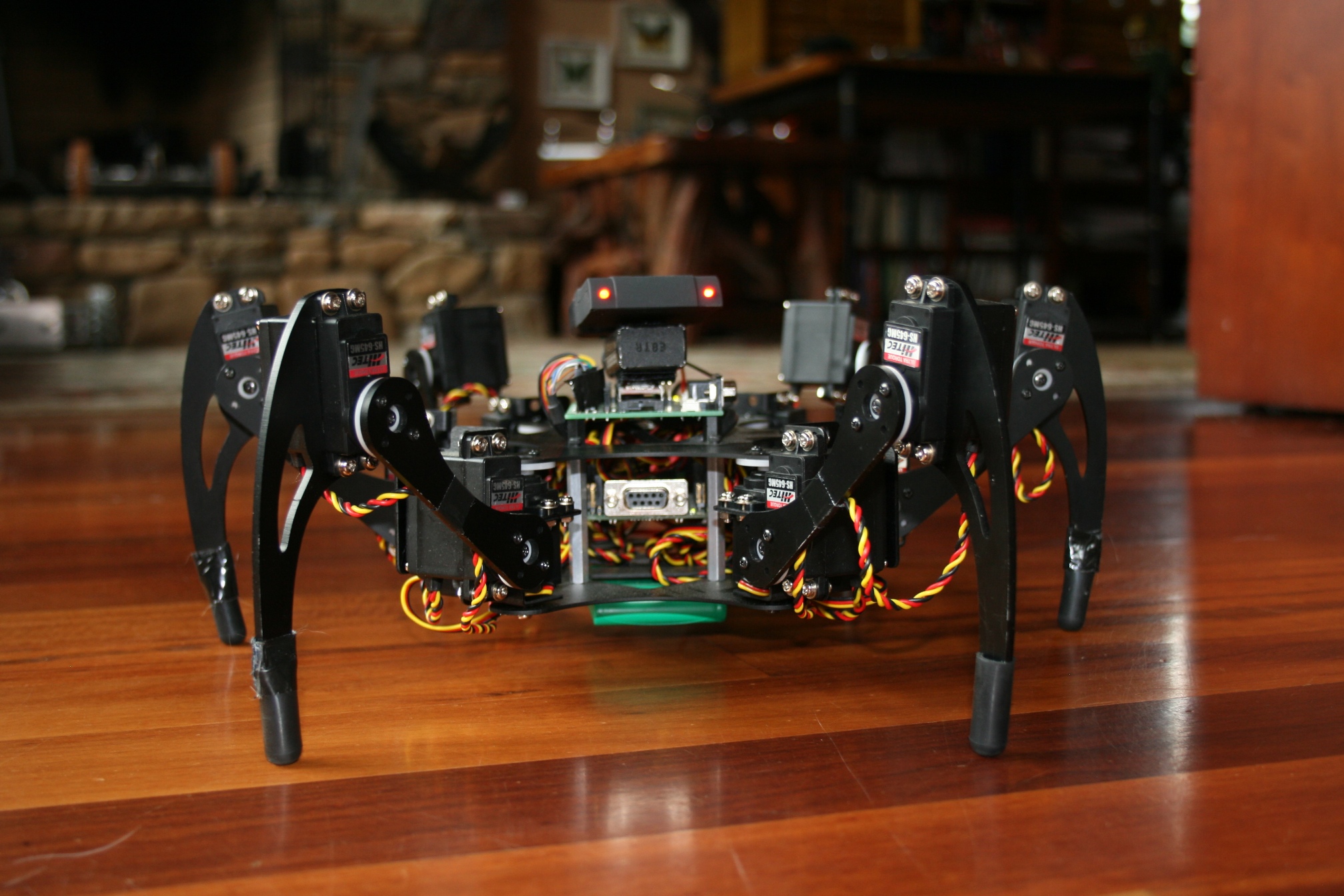
Having created several robots that roll on wheels of various kinds, we decided to build a robot that walks, or more accurately, crawls, in a spider-like fashion. We call him Creepy Crawler. We control this robot using a PS/2 remote control. Each leg has three Degrees of Freedom (DOF) so his gate and other movements are very creepy and biological. To create Crawler’s head, we hacked into a PS/2 receiver and installed the red receiver lights (LEDs) so that it looks like he has glowing eyes.

Technical Details
- Servos: 12 Hitec HS-645, 6 HS-485
- Remote Control: PS/2
- Batteries: NiMH & NiCad
- Legs and body pieces: painted machined aluminum

Wow, that thing is amazing! That has to be one of the coolest robots I’ve ever seen, incredible work.
Your story and robots are truly inspiring to me. I am most certainly going to plagiarize some of your ideas as I learn more about robotics and build my own, I hope you don’t mind!
Amazing, I’v read books about robots like that use “the tripod gait” but never moving indivual legs
Fascinating stuff!
You young women are truly an inspiration to all engineers young and old.
If you ever decide to start hiring, I am sure there will be a line a mile long at your door, myself included.
keep up the great work!
Muy divertido!!