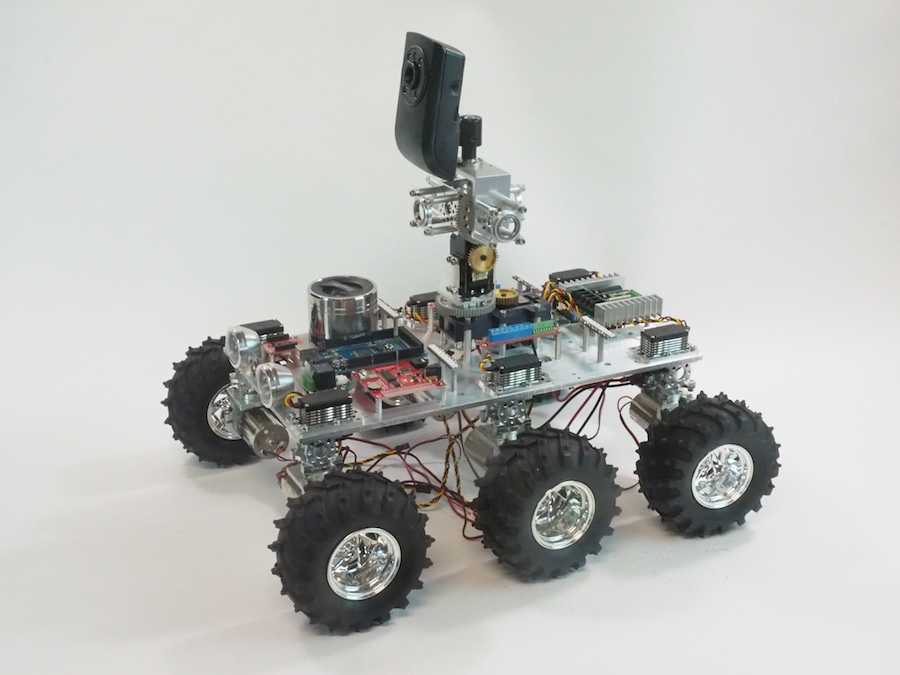
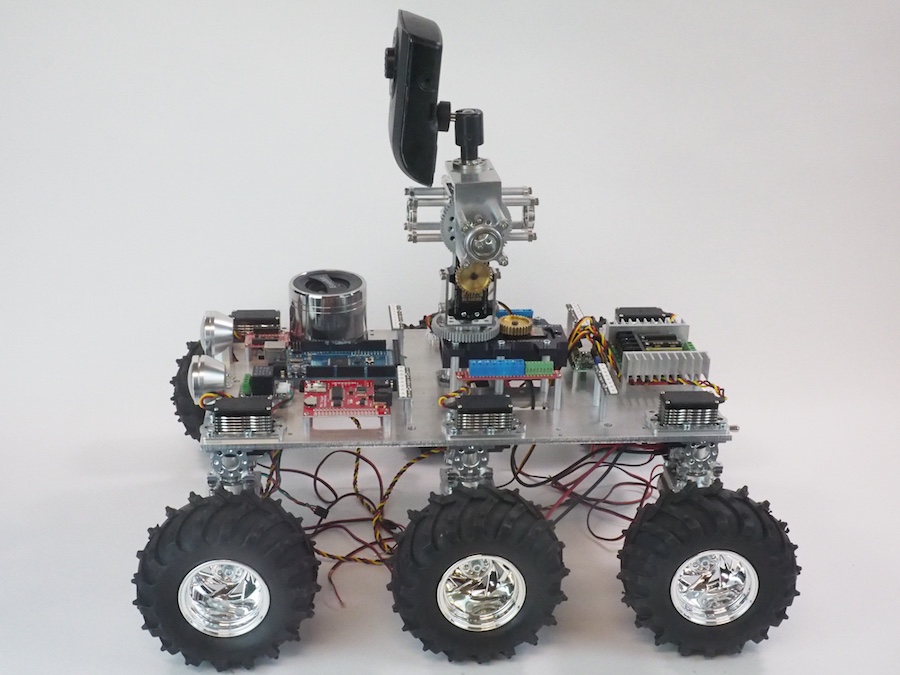
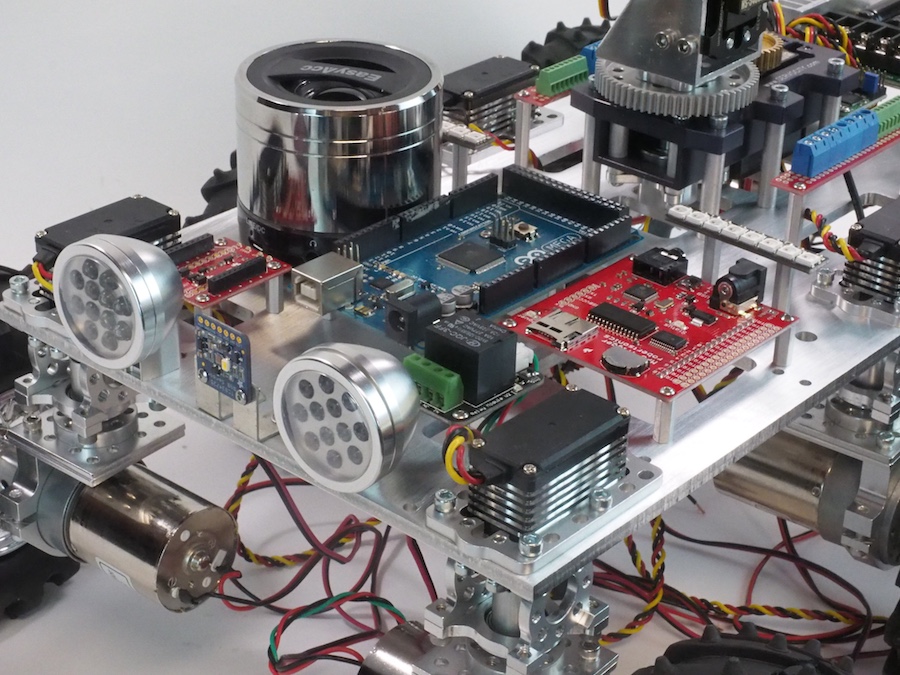
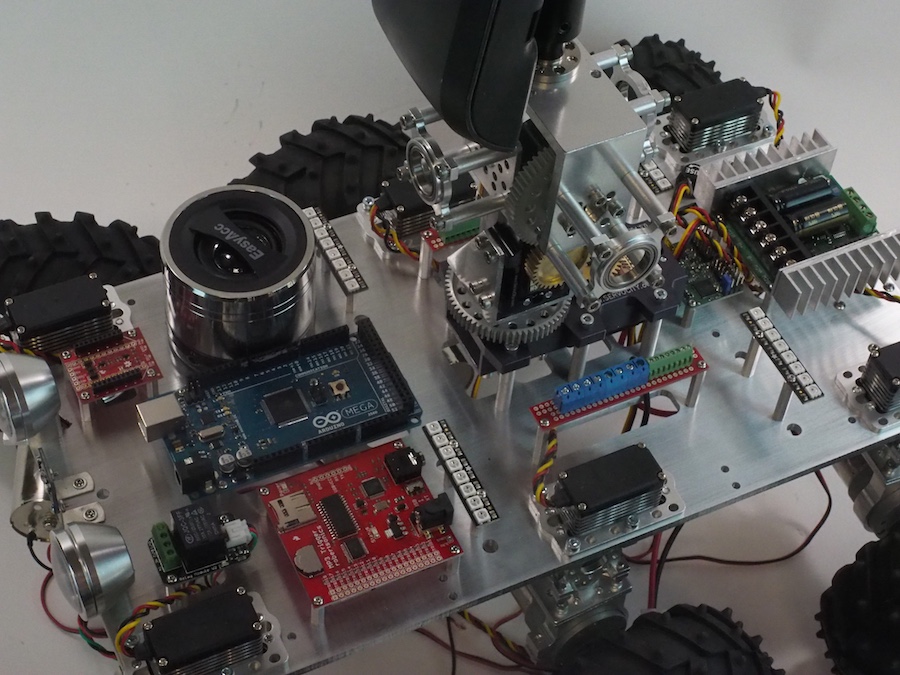
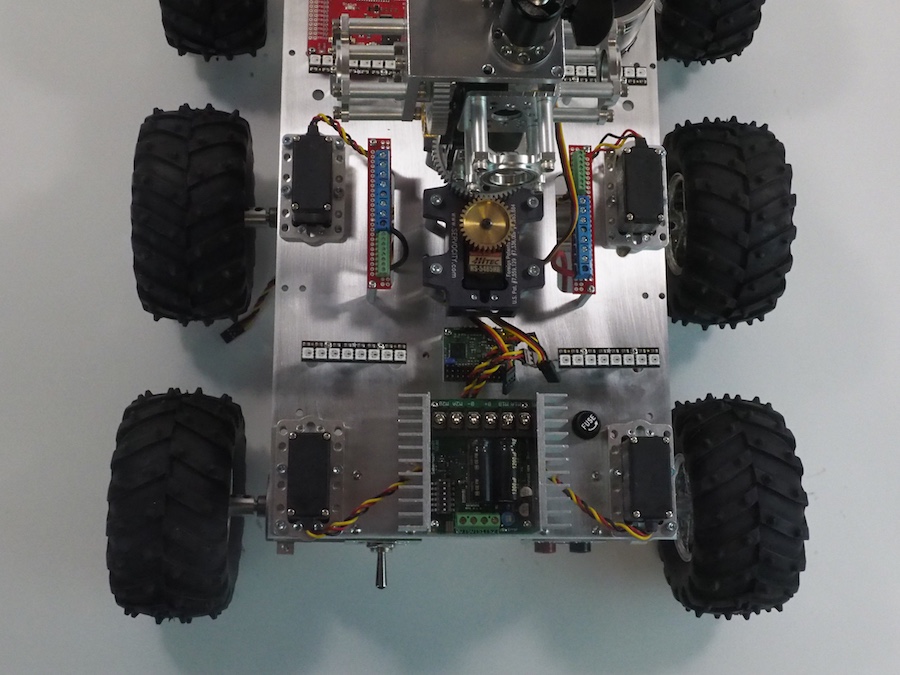
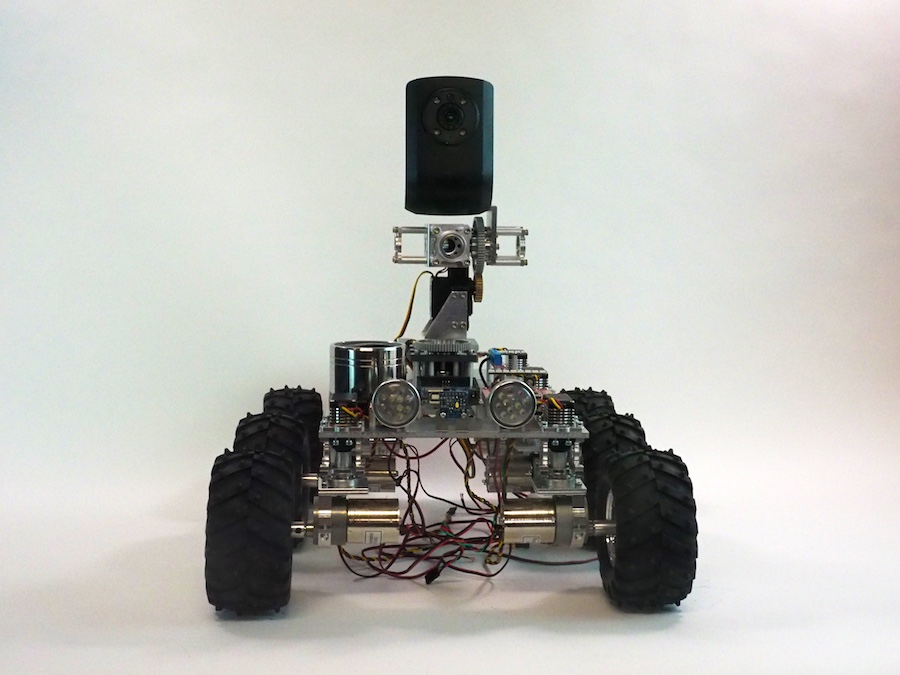
We’ve been working on the Rover Challenge robot for the New York Hall of Science. Its purpose is to give Science Center visitors a chance to drive a robot through an obstacle course, use ultrasonic and color sensors, record video, take snapshots, play music and sound effects, understand different types of steering, and learn about the various elements of a robot. Having completed the machining of the Main Plate, we are now assembling the various mechanical and electrical components onto it. The wiring isn’t done yet and some of the components are not yet installed. This is just a preliminary look at the direction we’re heading. The folks at NYSci asked us to make a compact six-wheeled robot that had a “homemade” or “science project” feel to it, so we’ve left all the electronic components exposed. This provides a good teaching platform with the various elements of the rover clearly visible, such as the Arduino, the motor controller, the servo controller, and so on. We will also be providing an optional clear acrylic top plate in case they wish to cover the components. This robot will have many features and options, including easily interchangeable wheels–either the knobby tires shown here or the gnarly metal wheels you might have seen in previous posts. Because each wheel is mounted on a servo, this rover will provide several different types of steering, including the rotational servo-steering we used on the Mars Rover and 90-degree strafing. It should be fun to see in action.

Very nice workmanship as you always show. The final views will be exciting and I hope you can provide us some videos of it in operation. Can you reveal the source and size and specs of what appears to be the LED headlights? Those look like great accessories for several projects I can think of.
Beautiful work as always. I see some fascinating aspects, as well as one huge philosophical question; what makes this a robot versus an RC car? How autonomous can this be without encoders? Speaking of RC cars, read https://traxxas.com/forums/showthread.php?175969-tire-tread-direction for some insight into which direction to mount tires.
Mike: I don’t think encoders are the key element that make a rover a robot. We’ve built many autonomous, sensor-based, fully-programmable robots without encoders. For home DIY work, I think the main thing that makes a rover a robot rather than an RC car is that it runs on a microcontroller that you can program to do different stuff and it utilizes sensors to sense and react to the world around it. A robot often has other features, like arms, turrets, servos, guns, music and/or voice, LEDs, etc., all of which can be programmed. But of course, all this is just a matter of opinion. When I sat down to define what a robot is I also decided that our robots should be made out of metal. But of course, that’s silly because many great robots can be made out of plastic and other materials.
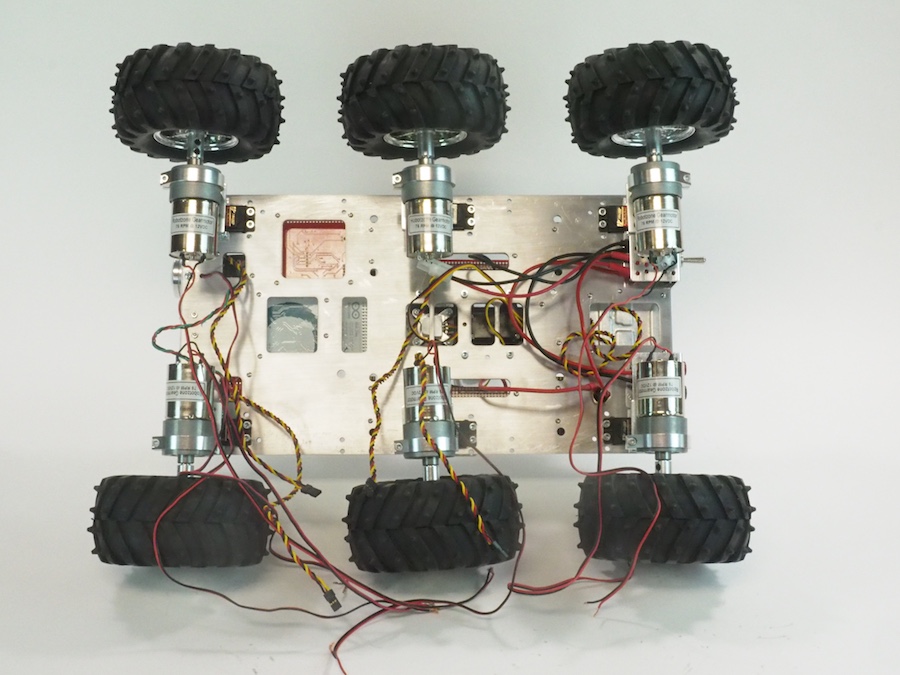
Mike, I forgot to respond to the other part of your comment. Yes, the tires are all mixed up in this picture. We were just excited that we made it this far, so we quickly mounted the wheels and took some quick pics. When we took these pics, we hadn’t actually driven the robot yet. Since then, we have mounted the tires properly, and also tried different wheels. We’ve turned the servos, did the basic programming, and taken it out for a test run. So far, so good. 🙂
Thanks for the reply. I asked it philosophically as much as anything. I’ve seen Cell phones whose vibrating speaker was enough to make it move called robots, so I think the term itself has become outdated. But the important thing is learning, exploring, and having fun while doing it. Great efforts in all areas.