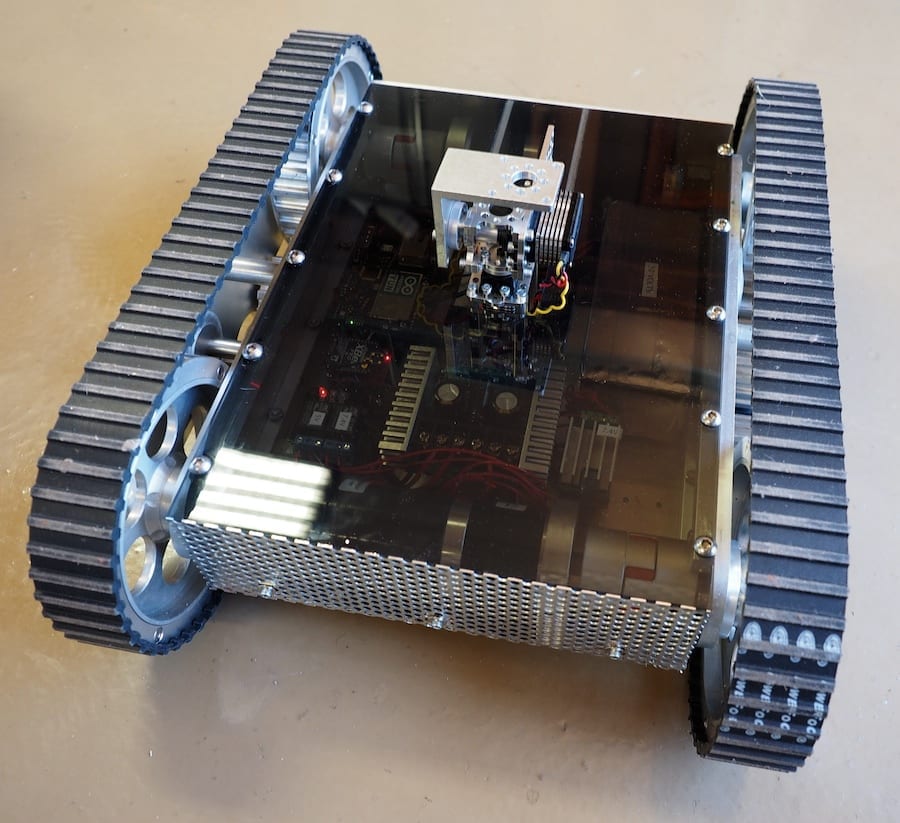
We are working on a tank with treads and a laser cannon gun turret. It’s a complex, long-term project with lots of CNC-machined parts as well a a variety of purchased components, but we’ve been making good progress on it. Today’s posting will focus on the base, which holds the electronics, provides mobility, and establishes a sturdy platform for the gun turret (not shown here).
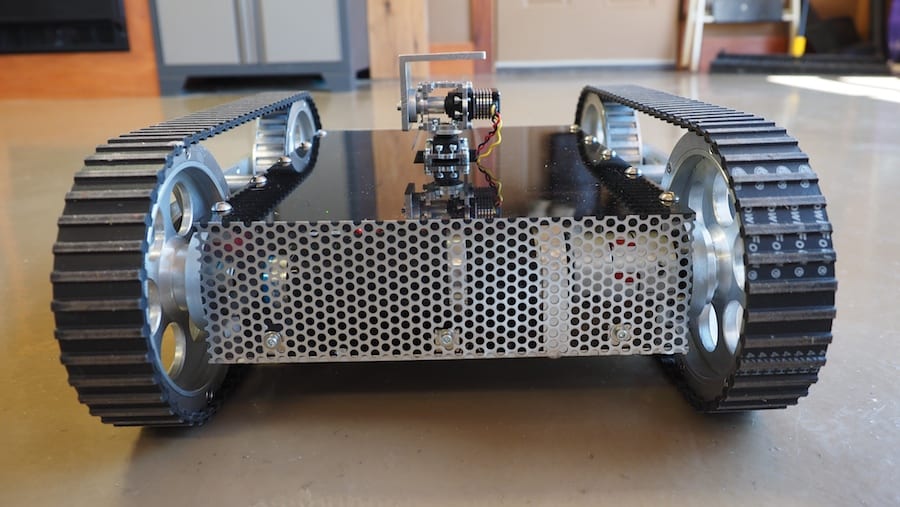

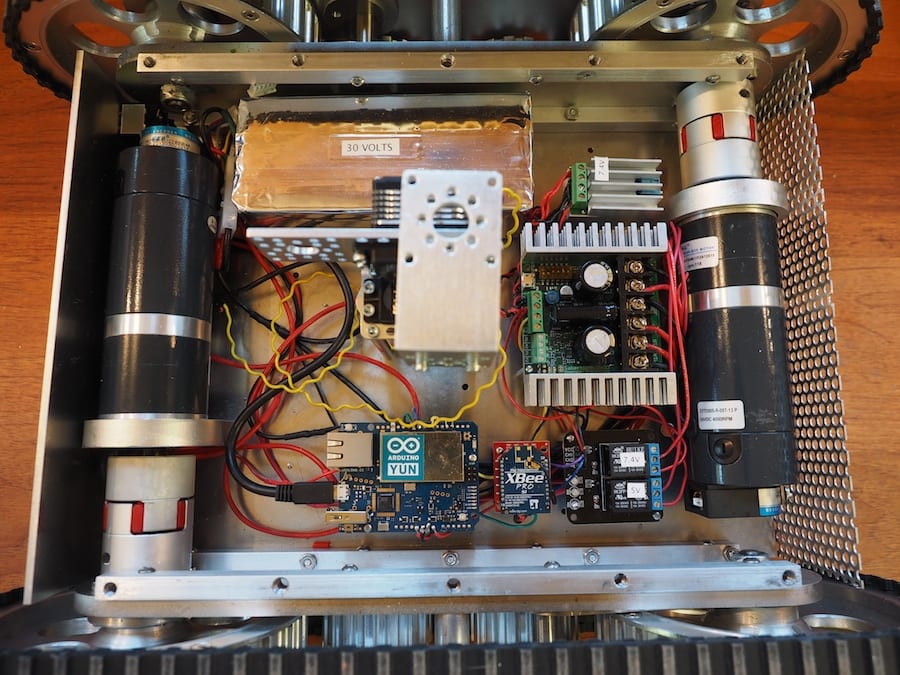
The robot is powered by a large 8-cell 30 Volt LIPO battery, our first ever. So we’ve got lots of power for the motors and the laser cannon. We are driving the wheels (which are actually timing wheels) with two beefy gear motors and a Sabertooth dual 32-Amp Motor Controller. The treads are timing belts. There are two machined aluminum plates (separated by standoffs) on each side that provide the mounting for the wheels. We are using an Arduino Yun for the first time in this robot, which is a new microcontroller that integrates Linux and Arduino into a single board, which among other things, provides for a nice wifi layer, including WiFi-based software updates. We’re using an AnyVolt voltage regulator to bring some of the 30V down to 7.4V for the gun turret servos and the laser cannon. And we have a second voltage regulator for the 5 volt components. The Arduino will trigger relays (shown) to turn on the four targeting lasers and the main laser cannon (not shown), which will laser-burn targets using an autonomous targeting system. This photo also shows the four multi-tapped rails that we made to hold the robot together, including the track sub-assemblies on each side, the bottom plate, and top plate. The front plate and rear plate are held onto the bottom plate with six small #6-32 angle brackets. To better visualize the scale of this robot, the bottom plate is about 10″ wide and 13″ long.
The CNC-machined back plate includes the main power switch, a USB jack for programming (although we’ve been using the Yun Wifi for that), banana plugs for charging, and a fuse.
There are many things we like about this robot so far, but we were especially pleased with the smoke-gray acrylic top that we machined on our CNC. It’s transparent enough to see the circuit board lights on the electronics, but opaque enough to give it a nice blackish sheen. The main top plate is held onto the rails with a bolt pattern of ten 1/4-20 bolts. The difficulty with gun turrets is that you can’t get the top plate off the base without removing the gun turret, which is a pain, so we machined a slot into the main top plate. We didn’t want to use fasteners or a hinge on the acrylic, so we machined mating shelves (grayish area along the edge) so that the small back plate press fits perfectly into the top plate and stays there without needing any fasteners.

Nice! by chance, did you make the cnc with plans? Are you selling the plans?
The belt looks like two timing belts glued back to back or, is this a hobby tank tread? nice work 🙂
Lorin: It’s a double-sided timing belt. Unfortunately, no, we don’t sell CNC plans. It was just a personal project for us. —Camille
Very nice so far! I love tracked robots. What are you using to charge your Lipo cells? Is it a custom charger or a commercially available model? Watching with interest.
Chris: Thank you! We love tracked robot’s, too! The battery charging question is a good question. Normally, we charge our batteries using a HiTec X4 AC charger, but that only handles up to 6 cells. To charge the 8 cell high-voltage battery on the tank, we use an iMax B8 battery charger connected to a power supply. —Camille
Always amazed with you work. Thanks for inspiring us
Hi Camille,
I noticed that the ‘outside rims’ of your timing wheel runs over the ridges of the timing belt. Does this cause any issues? I designing a similar tracked robot and I thought it would work better if the timing belt fit within the two rims of the timing wheel. Thoughts?
AlexV: Running the “tracks” on the outside of the timing belt doesn’t cause any issues. —Camille
Beautiful machine work. I’m trying to figure out the belt size. I know it’s a double and I count about 84 teeth. If you wouldn’t mind telling us, is it an L or an H belt? Did you have to make a groove on the inner teeth to clear the timing belt pulley outer guards?
I look forward to seeing how this project evolves.
Amazing!
nice work up there, please could you tell me specification of the motor , still i’m struggling to buy geard motor for my projects
Fantastic build! Would you be willing to share the specs/supplier on the timing belt and pulleys? Anything you can offer would help with my own project. I included my email if you prefer that method. Many thanks!
Hello,
It’s very nice this job, is a simple and all functional tracked robot.
Can you please share the characteristics of pulleys and belt?
Best regards
Mauro Melo
Hi,
your project seems awesome and i am admired of it . May i know the spec and name of the motor which you have used here.,
Regards,
Jegannath Prabhu
Hi,
How did you do the driving wheels? Thank you!