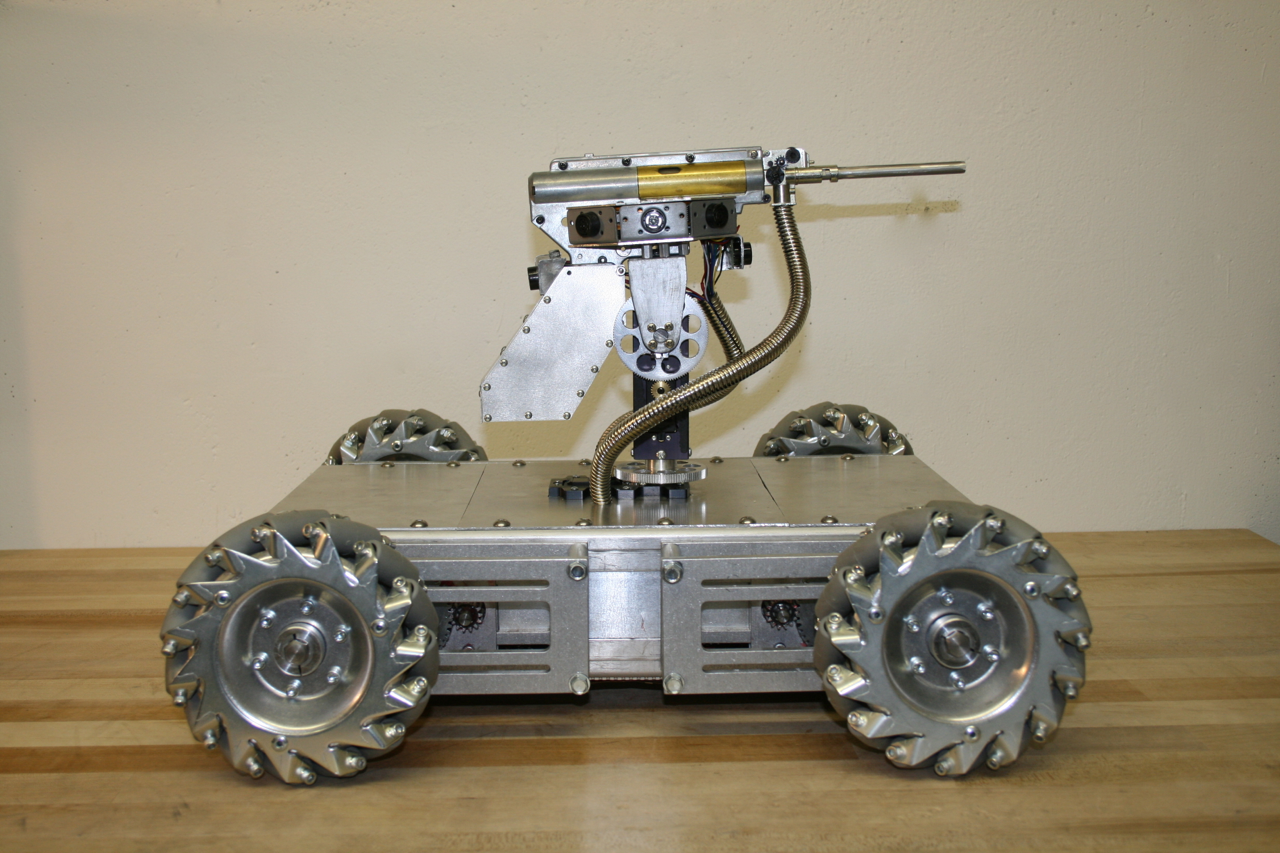
We would like to introduce Mechatron, our mechatronic tank. When we designed and built Mechatron we wanted him to be tough looking, industrial, and retro-futuristic, with lots of metal, rivets, and gears. He’s built entirely out of aluminum, brass, and steel, but inside, he’s chock-full of high tech electronics. See pictures and more text below. And be sure to watch the video to see Mechatron in action!

Mechatron includes special wheels with rollers slanted at 45 degree angles and driven by dedicated gearboxes, four powerful motors, and a software-controlled drive system that we wrote that operates each of the wheels independently. The result is that he can move in any direction at any time in any orientation. In other words, he can drive forward and backwards or turn like a normal vehicle, but he can also drive perpendicular to the direction he’s facing or at any desired angle. Weighing in at forty five pounds, he is by far our heaviest robot, but he is also our most agile, which makes him tremendous fun to drive.
Mechatron’s gun turret pans 360 degrees, includes 8 range-finding sonars for target detection, a laser, and a high-powered electric automatic weapon that shoots brass or plastic pellets. Ammunition is fed from the base of the robot up through one of the articulated metal tubes attached to the turret (the other tube contains wires). He can fire extremely rapidly while standing still or moving.
Strips of 52 programmable RGB LED lights have been mounted on Mechatron’s underside and within his turret. The turret LEDs indicate the robot’s current mode and whether the weapon system is armed. The LEDs on the underside change color depending on the direction of each of the individual wheels (Blue = Stopped. Green = Forward. Red = Backward), which helps to illuminate how Mechatron’s unique drive system works.
Mechatron is designed to function in a variety of different modes, including both user-controlled Radio Control and/or fully-autonomous. For the RC mode, we built our own controller which matches Mechatron in look-and-feel. The left joystick controls the pan and tilt of the gun turret and includes the firing button on top (which is armed using the missile switch). The right joystick controls the drive system. Forward and Backward motion (Y-axis) moves the robot forward or backward. Twisting the joystick turns the robot in the direction of twist (Z-axis). Moving the joystick left or right (X-axis) causes the robot to strafe left or right while maintaining his current orientation. Combined X-Y-Z joystick motions create unique and agile movements, such as strafing in circles. The robot can move in any direction, while panning and tilting its turret and firing all at the same time.
Technical Specifics:
- Overall Design: Beatty Robotics
- Arduino Software: Beatty Robotics
- Metal armor plates: Beatty Robotics
- Main Microcontroller: Arduino Mega 2560
- Microcontroller used for controlling LED lights: Arduino Nano
- Light Controller Software: Beatty Robotics
- Wheels: AndyMark (special thanks to Andy Baker, who was great to work with on these)
- Drive Gears: Modulox (special thanks to Dan Richardson at iR3 Creative Engineering & Andy Baker at AndyMark)
- Pan-Tilt gears and other parts: RobotZone (special thanks to ServoCity)
- Pan-Tilt Servos: Hitec Digital
- Sonars: (12) Maxbotix MaxSonar Ultrasonic Sensors
- Turret Sensor Head: Beatty Robotics
- RGB LED strips: Adafruit (Go Blinky Belt!)
- MP3 Sound Board: Sparkfun MP3 Trigger
- Servo Controller: Pololu Maestro
- Voltage Regulators: Pololu & Dimension Engineering
- High-amp Relays: DFRobot
- Motor Controllers: (2) Dimension Engineering Sabertooth 2×25
- Motors: (4) CIM
- Wireless Communication: Xbee Radio with Sparkfun Xbee Explorer Regulated board
- Joy Sticks: (2) 3-axis hall-effect joysticks from CH Products
- Batteries: (1) 12v 3-cell Lithium-Polymer 20C
- Aluminum, hardware, fasteners, wire, tools, and much else: McMaster-Carr
- Wire, electronic components, IC boards, and much else: Sparkfun & RobotShop

Mechatron is very cool. Does it acquire targets and fire when in fully autonomous mode? It could stand guard outside your house.
Can you build me one????? Give me a price and how long it will take 🙂 I will def buy one from you!
-Justin
413-652-5570
Give me a price and how long it will take 🙂 I will def buy one from you!
-Justin
413-652-5570
Thanks, Mark. Mechatron has three sonars mounted on the front panel, which it uses to drive around autonomously and avoid running into chairs, dogs, and children. It has eight sonars in the turret facing all directions. These sonars output a voltage (between 0 and 5 volts) proportional to the range of the object when they detect an object, which we can use to determine exactly how many inches the object is from the robot. So, when we put the robot into “Defense” mode, we loop through the eight sensors in the turret very rapidly and repeatedly, get a feel for the room, and then if any objects move toward us (i.e. the range to the object is decreasing), we pan the turret to that direction and shoot the object. The idea is that the robot shoots any person or thing that moves too close to it. Now that we are done with the overall mechanics, electronics, and base software of the robot, we’re creating the various modes in which it can operate in.
That robot is freaking awesome! Somebody spent a lot of time designing and building it. I’m very impressed. Especially with the “defense” mode auto firing.
Could you please provide us with a sense of scale. Those are probably 6″ Mecanum wheels and the “lunchbox” gearbox plates are about 8″ long which would seem to indicate that your design is about 17-18″ long and about 12″ wide. Is this close?
With CIM motors @ 12V into these gearboxes this must have some major power (limited by the friction of the wheels)!
Floyd: The overall footprint is about 19-1/2″ wide by 20″ long. The rectangle in the middle (between the gearboxes) is 10″ wide x 18″ long, which is what gives the robot the “long” look even though it’s more or less a square in footprint. The Robot is about 15″ high. You’re right about the 6″ Heavy-Duty wheels. And you’re right about the 12v and CIMs. This robot is extremely powerful. By far the most powerful we’ve built (as you can see, our other robots tend to be quite small). We don’t have a room big enough to really open this robot up, but it’s very fast and very powerful. We have to be real gentle with the throttle. And because it weighs 45 pounds, it’s a bit of a brute in the house. If it hits a books shelf or something, it chips it. On the other hand, I don’t really want to take it outside. It does well on hardwood floor and carpet, but it’s not designed for grass and rough terrain (the wheels, very low to the ground, etc.). The wicked wheels, big motors, and open gearboxes were all chosen to try to capture that tough, industrial look we were going for.
Hello, can you tell more about gun – starting system and more photos.
Max: the internals of the gun uses an M4 AEG V2 gearbox that we took apart and modified to our needs. We programmed the Arduino microcontroller to trigger a DFRobot relay, which allows power to flow directly from the 12V LIPO battery to the gun’s motor. The fire command also instructs a different relay to turn on the servo that drives the electric ammo magazine that is in the base of the robot (this drives ammo up through the metal feed tube (which is actually a long spring). The servo runs off an adjustable voltage regulator to bring it down to 9 volts.
How about a producing a kit for us “not so electromechanically” inclined but have the aptitude to learn? It will be a big seller!!
I commented about the wheels on this beast over at the Arduino forum (I thought they were custom made); looking around the AndyMark site that a posted noted was the source of the wheels (then coming here and seeing same), I found the motor/gearbox for the wheels.
Now – I don’t know if any of the stuff from anywhere (AndyMark, etc) was donated or not – but if not, and purchased at-cost from AndyMark – the wheels and gearboxes -alone- would cost over $1000.00 USD. I am guessing that the cost for this entire machine (really rough guess – I didn’t price out each and every part, but it wouldn’t take much to come closer) is probably around $3-5000.00 USD. That of course doesn’t take into account shipping costs, time and effort to assemble and fabricate anything, etc.
This is anything but a cheap machine, for anyone who wants to build one. A kit (or pre-built) would only cost more, if Mr. Beatty decided to offer one (because, duh – he’d be a middle-man charging for the service).
Would Mr. Beatty care to give more details on the cost (I’m not sure how over/under I am with my estimate)?
We set out to build the best, coolest robot we could. People have asked us to sell Mechatron, build them one just like it, or turn it into a kit, which would be a lot of fun, but I think just the component parts and raw materials would probably be too expensive for most people. For us it was a labor of love.
That’s very cool! I’d love to see this thing in a robot battle. A flame thrower would round it out nicely.
We’ve made a similar thing at school. The difference is that Mechatron is far(!!!!!!!) cooler than my 2 wheeled (as i now realized) crap… I can just say: Good Work! By selling it you can make Millions! Best (selfmade)thing I’ ve ever seen!
i want this this is awesome =D
Have you considered mounting a video camera to the gun and re-working the remote in software so that your robot could be driven from an xbox 360 controller? You have effectively built a system that could perfectly replicate the movements of nearly all modern first person shooter games. Adding a videogame controller and a camera would make this device pretty useful.
Thanks for your comment. We do have a camera capability for Mechatron, but we ended up not mounting it (although we still could). We have built other FPV (First Person View) robots prior to this one, such as our Security Robot on this page: https://beatty-robotics.com/?p=366 (note the camera mounted below the gun). But when we are controlling our robots via a remote controller we find that we don’t tend to like the FPV as much as just watching the robots directly. However, if you were in a real battle, of course the FPV would be the way to go because the operator wouldn’t need to put himself into harms way. We have also experimented with PFV on our flying robots: https://beatty-robotics.com/?p=4. Regarding the remote control: We’ve hacked into and controlled our robots with PS/2 controllers, a TV remote, and even an iPhone, so the xbox 360 controlled would definitely be feasible.
Any chance of getting the schematics, would love to attempt to build one.
Best robot I’ve seen in a while.
Because a gun in school is a good idea?
It’s easy enough to remove it for the testing / run-up that they would be doing.
Can the gun tilt up and down, say to shoot at a target that’s higher than the bots gun is mounted?
Yes, the gun turret pans 360 degrees and also tilts up and down.
This would beat any alarm system in the world. The perfect watch dog. If someone was robbing my house and this thing came around the corner and started shooting, it would certainly make them run. Not to mention schools, factories, shopping malls. Whatever. Being non lethal is nice too. I hope you make an absolute fortune with this machine.
WANT SO BAD!!!!!!!
and those mecanum wheels don’t ruin your floor? nice job.
Thanks, Phyzooks. To answer your question: The inner rollers of the wheels are rubber, so they don’t damage floors.
Wow! It`s fantastic! I realy enjoy this!
I don`t know what to say!
this is the coolest thing i’ve ever seen.
have you played with the xbox kinect? throw that & a gps on a flying one with an iphone/droid controller!
Very Nice, that could be fitted with a navigation system, a AI and a programmed patrol route. 3 microphones arranged in a triangle could be used to detect sounds, and the direction it comes from. That way, it should be possible to get it to notice sounds above a preset limit, and get it to approach it.
Combine that with the existing gun, and a camera, fit a laser pointer, add that the existing turret system. Hint:openCV for fast object tracking, and blob tracking
Since you already have the muzzle velocity of the gun, it is also possible to program in a ballistic table. That, combined with the existing ranging sensors should make things really interesting and accurate.
It should the be possible to actually manually remote control the turret, wile watching the camera feed and put the bright shiny dot on a target and fire..
There is a good ballistic calculator at jbmballistics.
Also, check out : http://nontexpress.wordpress.com/
Håken , Located in Norway.
The robot’s voice is the voice from the cannon in last part of “Resident Evil 3”?
Actually, we created the voice by recording my own voice and putting it through voice/sound changing software.
Good guard for my home. But I would want a version with caliber .45 ACP bullets instead of balls. Then it will be better than my bulldog. And I could say to the police: “It was done by my robot, jail it if you want”.
Hey, I would like to know where I can obtain the electrically cont5rolled minigun. I am very interested to build a turret. Thanks!
Your robot is AMAZING
I really like the lights, the armor plates, the gun, and the movement……. SO pretty muce the whole robot
Could you please build me one and also may i have a price and how long it would take i really want one.
Thanks
Jack
Mark
Absolutely love your robot it looks so cool could you please tell me how much it would cost to build one of these things already I’m guessing in the 10,000 based on how complicated the robot is.
Its probably a stupid question but it isn’t mentioned can it function outdoors as well as indoors. Im wondering if its possible if you could make another one of these if so
Please get back to me.
Thank you, Mark. We really appreciate it. You estimated cost is probably about right. Regarding outdoors: Yes, it does work outdoors, but it works better indoors. It’s not designed as an all-terrain type robot (it has very low clearance). It prefers smooth floors and carpet. Regarding: selling/building. I talked it over with my daughters, and we’ve decided to keep the robot for now (perhaps sell it later), and unfortunately we don’t have time right now to build another one (we’re in the middle of a different robotics project).
I saw you visiting in yoglmblog account. Just wanted to thank you for the visit. You have an awesome blog here. I think a lot of this new robotic stuff is really exciting. I found this site blog with you. I don’t know if you’ve seen it. It makes very interesting reading though. Happy Blogging!
This looks like a cool project.Me and several college seniors are looking for a final project to show off could u send the scematic or a computer aid drawing of your machine.The college sets money aside for project and such we really like it and wanna adapt it to a flamethrower
This looks like a cool project.Me and several college seniors are looking for a final project to show off could u send the scematic or a computer aid drawing of your machine.The college sets money aside for project and such we really like it and wanna adapt it to a flamethrower
Thanks, Ed. Unfortunately, we don’t have any schematics or computer aided design drawings for Mechatron.
Fantastic site. A lot of helpful info here. I’m sending it to a few buddies ans also sharing in delicious. And naturally, thank you to your sweat!
Any chance you’d be interested in creating/selling the plans for it? With the interest you have, I’m sure there’s people that would buy it.
Brian, Thanks for your comment. We just build robots for fun, rather than to sell them or the plans.
Hi,
I am making the same thing for hobby.
please suppose me as your son and help me 😀
I need some help.
first of all, what expansion board have you used to drive 4 dc motors?
also what have you done with encoder ? how did you decode the phase A and B of the encoders ?
is it possible to publish the codes?
I have purchased 4 motors with encoder, arduino uno and motor shield.
right now I am stuck in decoding part . so your help is really appreciated.
Nathan
Nathan, The motors are controlled with two dual 25-amp motor controllers: Dimension Engineering Sabertooth 2×25. We don’t use encoding on this robot.
I am a student from Ngee Ann Polytechnic and I am doing a project on using arduino to control the vehicle with 4 mecanum wheels. Could you kindly send me the codes to control the wheels to make it move sideways, forward, backward and rotate.
I wonder how you made this weapon Mechatron or if you would like conprarão respondecen me and how can I do for me uam
Hello, I would like to create the same robot as you but I do not know how to put make: assembly, parts, price … pourais you give me the plans, parts. thank you in advance
I just saw this, this is the coolest robot ever!! This inspired me to build one on my own. I have built the platform with four motors and 4 inch mecanum wheels. The robot is controlled with PS3 controller via bluetooth. It works great so far and moves exactly as your robot moves in all directions.
I need some help with the electric gun. My plan was to buy a plastic AEG gun and create a mount for it. However, is it possible to share the CNC file for the gun? I would like to re-create what you have. Please let me know if that is possible.
Thanks.
Hello. I’m glad you were inspired and your robot was successful. Send me some pictures. The AEG electric gun isn’t machined on our CNC. We took a part an automatic rifle. The most advanced ones have metal firing boxes.
Here is the video:
https://www.youtube.com/watch?v=v1XEC-YQYKc
I have upgraded the chassis to stronger plastic so it can move really fast now. In the video, I am moving the robot slowly as the old chassis was buckling under the weight of the motor. I am also building target robots which the robot would shoot at.
Now, I need to figure out how to mount the Airsoft gun. Looks like you guys built custom magazine for the gun, is that so? Could you please share the parts list and help me build one? My goal is to create a system so that plastic balls can be refilled automatically.
Another aspect of project is to create “wireless battery” for the robot which I have some idea how to do it.
I look forward to your help.
Thanks a lot!
Param
Param: Thanks for the video. Here are a few tips: You are right to make your base rigid. It has to be totally, totally rigid, not just for the mecanum wheels and motors, but even more importantly for the pan/tilt that you’ll secure to the center of the base. What type and thickness of plastic are you using? If it can’t hold the weight of the pan/tilt system and gun with zero deflection at the center of the robot, then it’s not the right material. This is critical, otherwise the gun will bounce in a silly manner when you move. The next critical item is to make sure you have a really good pan-tilt mechanism, otherwise your gun will jitter and wobble all over the place. On the airsoft gun, we used an electric hopper/magazine. However, it’s very tricky to get that to work because you have to push the ammunition up through a long curving tube from the base. Very hard. If at all possible, I would use one of the guns that has a small gravity fed hopper that goes on top of the gun. You’ll find that to be much easier. Regarding the wireless battery: I don’t think that’s going to be feasible unless you’re Nikola Tesla and can invent a new technology. On the other hand, if you do come up with something, I would be very interested to see it!
good
Hi,
Would you be able to produce instructions for this, or at least a schematic, it’s just I’d love to try making it as a project. Also, how long did it take to build roughly? It looks amazing!
I look forward to hearing from you.
Hi, Nick. This is a very advanced robot. To get started with robotics, I would think about getting an Arduino Inventors Kit from Sparkfun, Adafruit, or some other source. Work through all the examples with your parents. That will get you moving in the right direction.