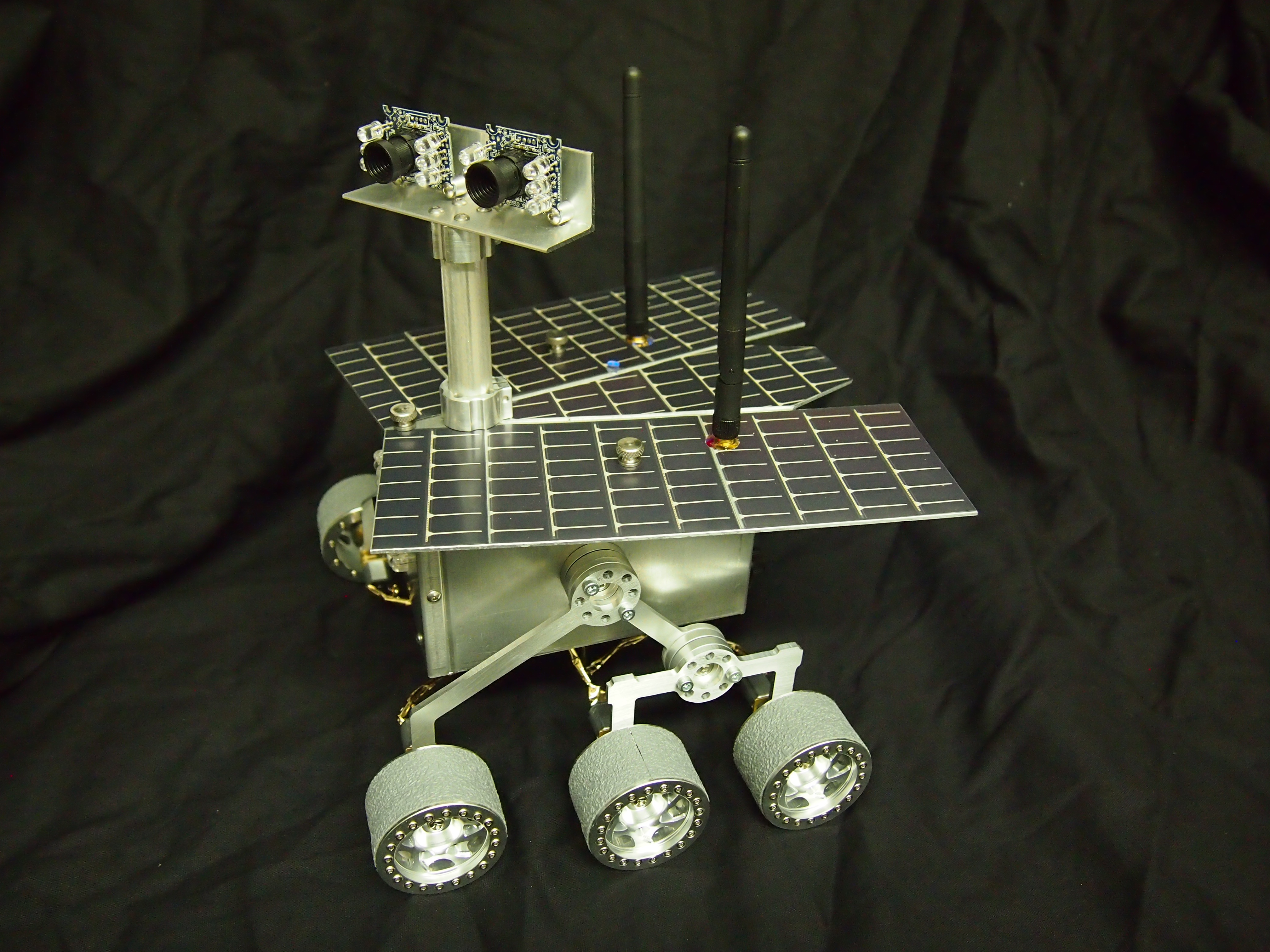
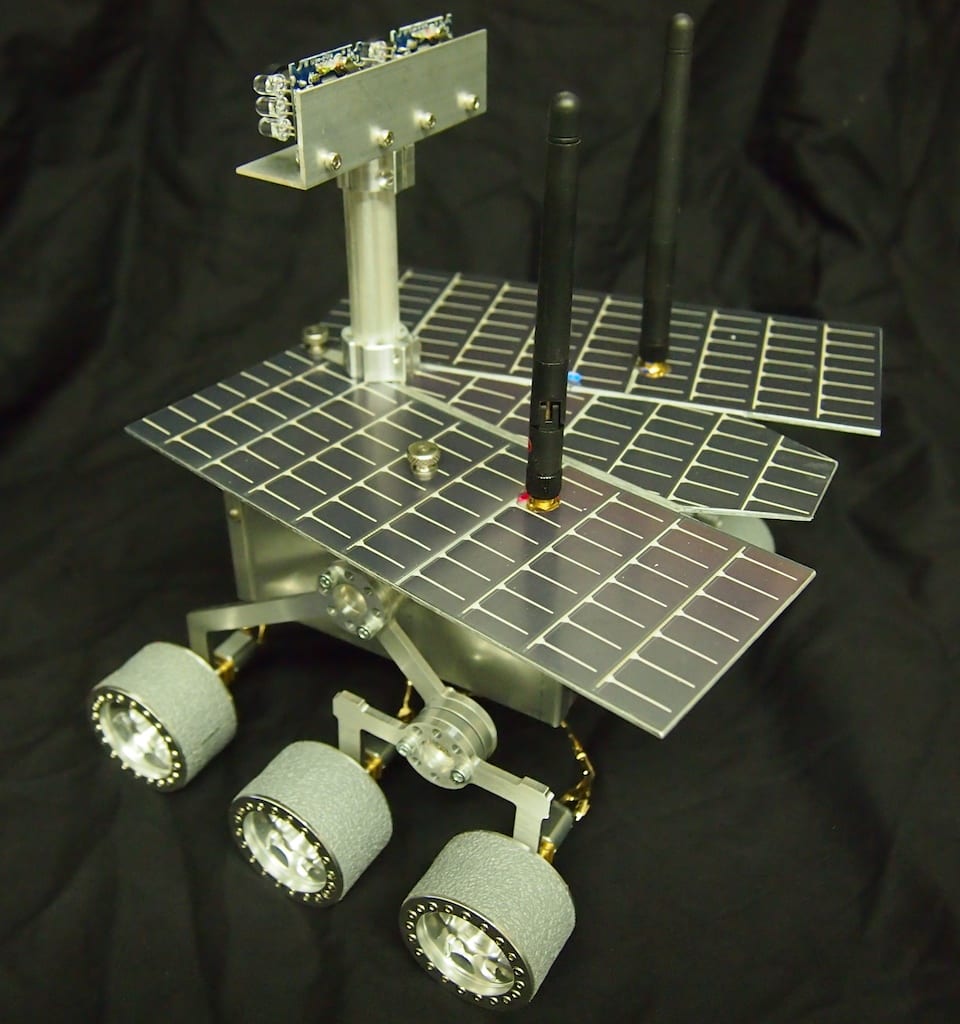
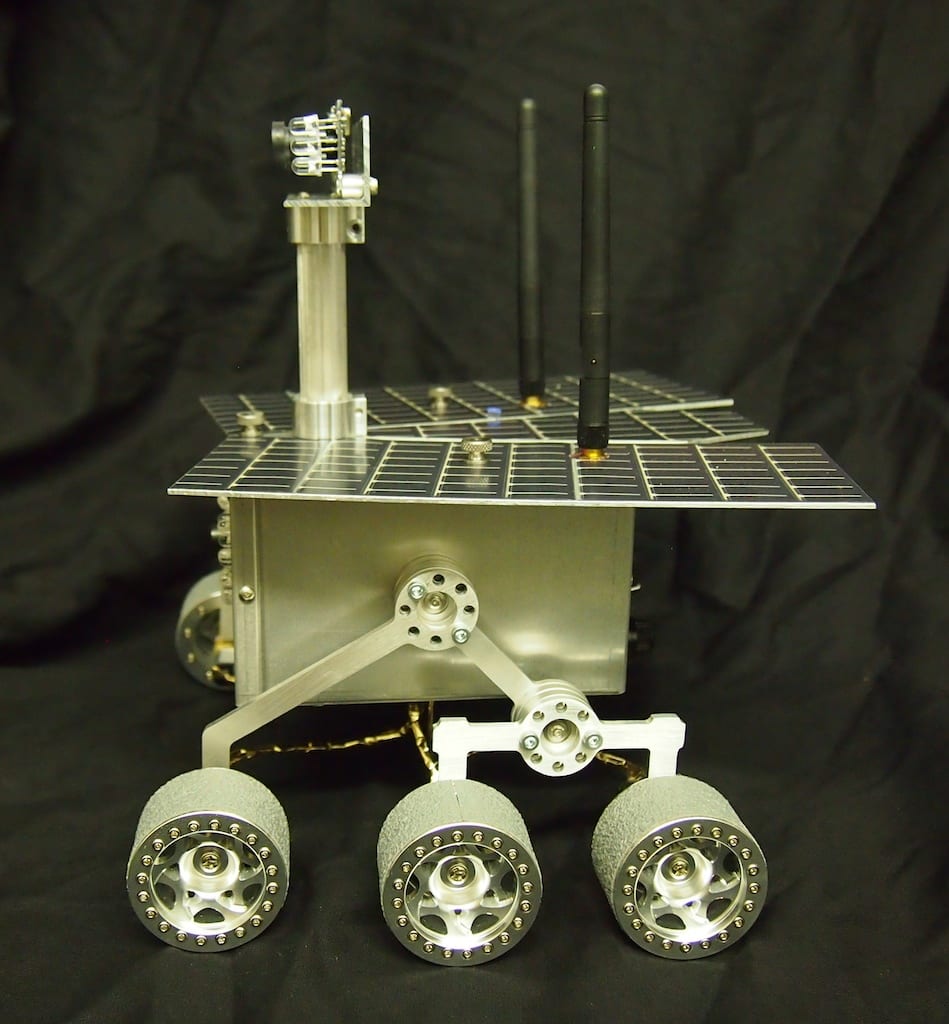
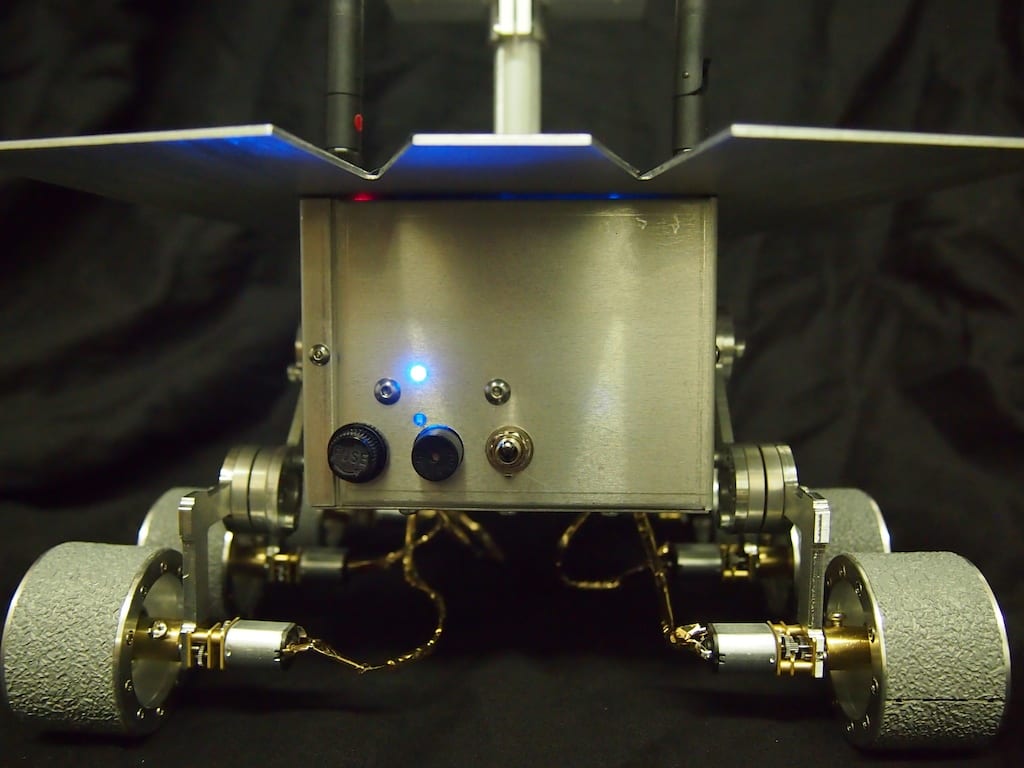
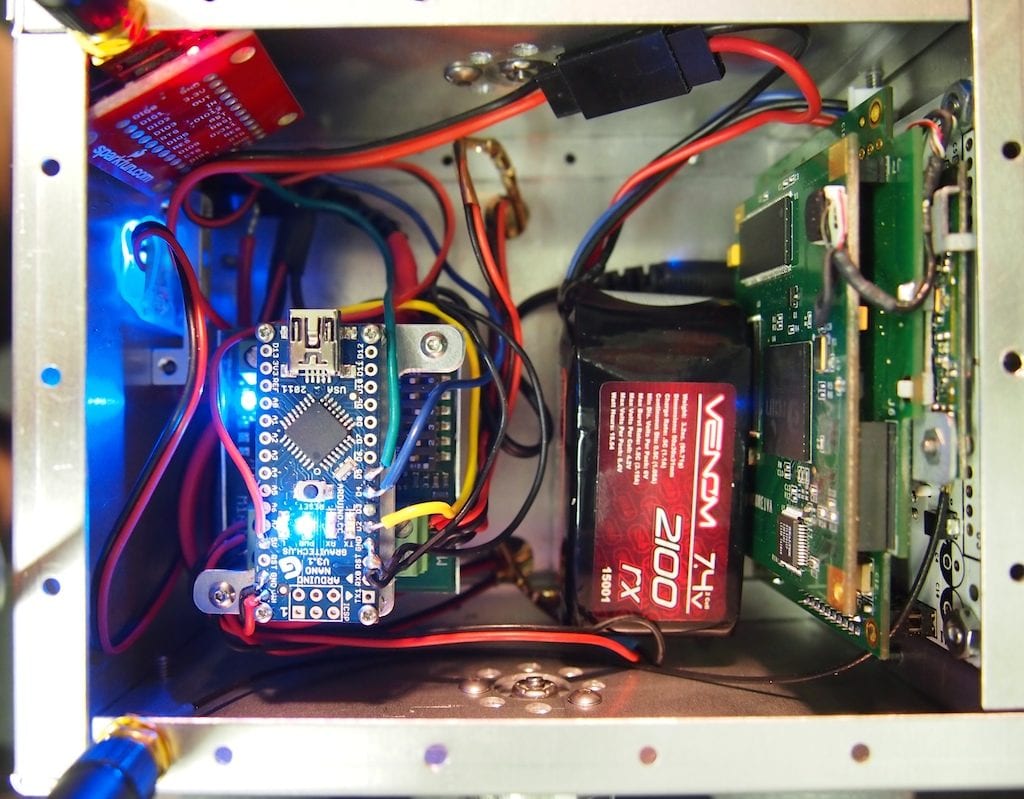
Recently we were asked to build a miniature Mars Rover for a new space museum in the Czech Republic. Although the Mini Mars Rover is only about 8″ long, it is a functional robot, including an Arduino Nano microcontroller, a high-resolution wifi camera, an xbee radio for remote control, a Sabertooth motor controller, six motors, a rocker-bogie suspension system, and other components. We designed and machined most of the robot’s parts using our CNC Mill.

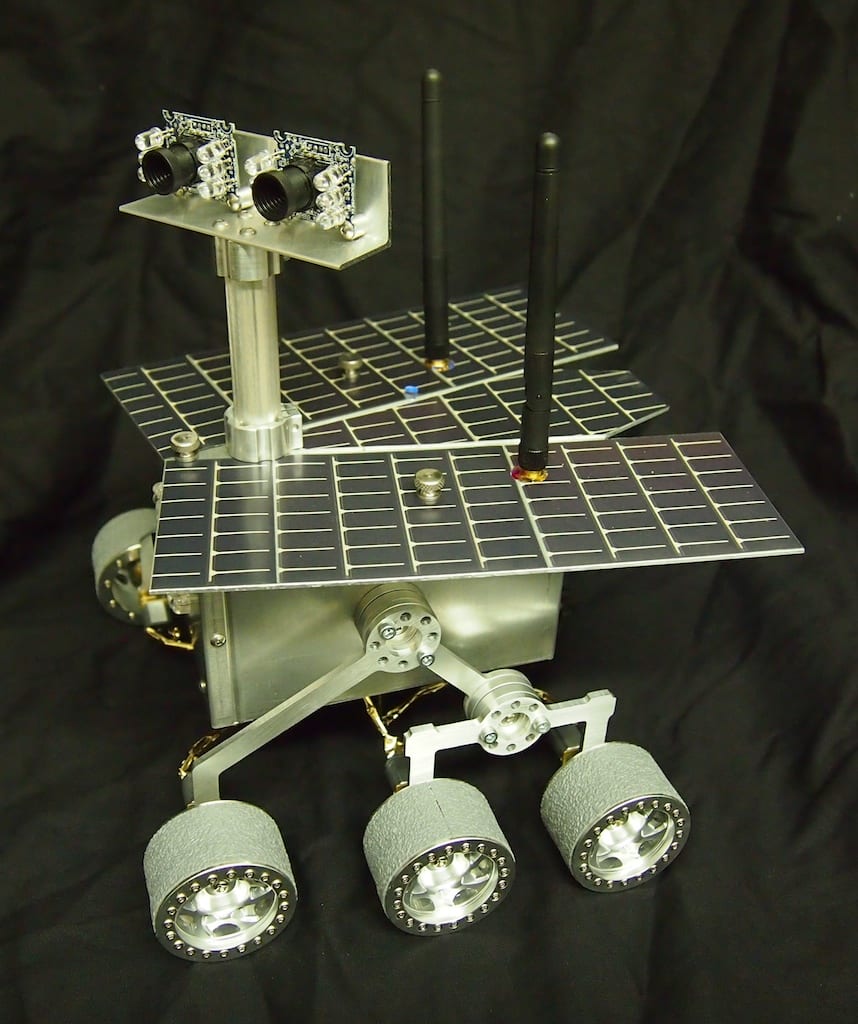
Mini Mars Rover – Top Rear View 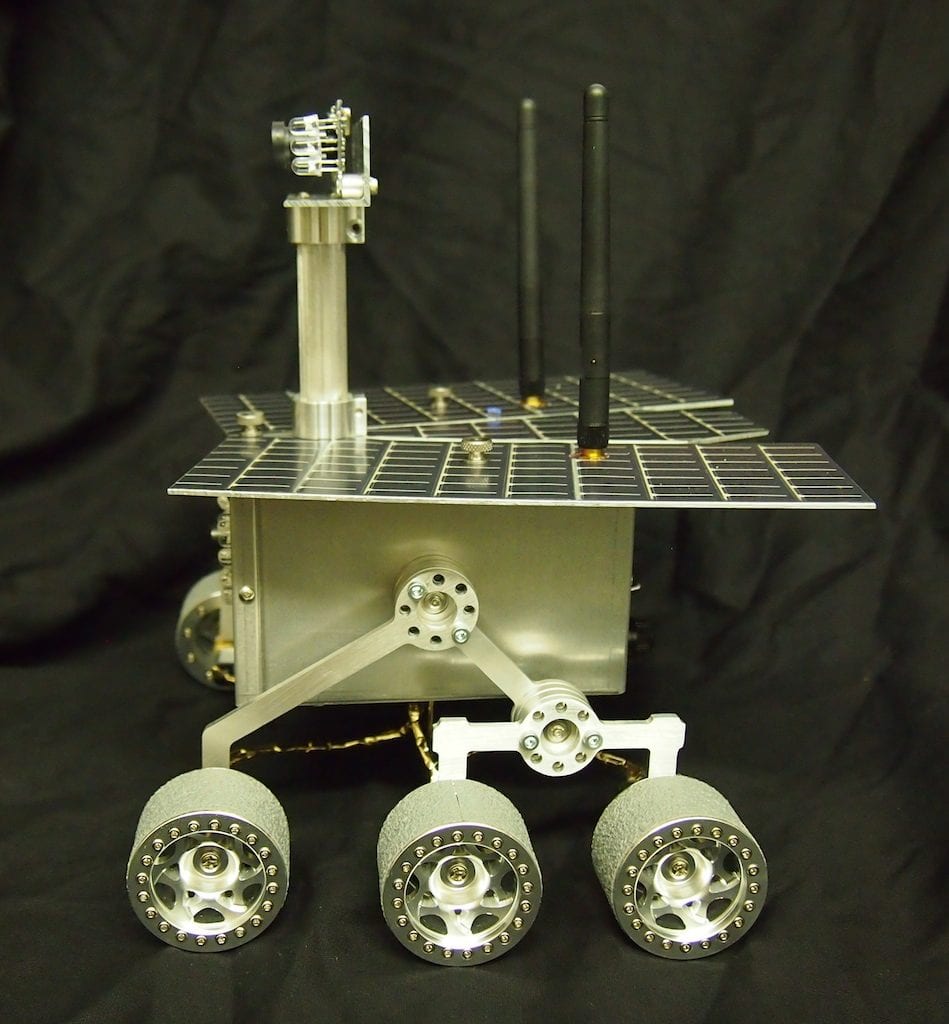
Mini Mars Rover – Side View 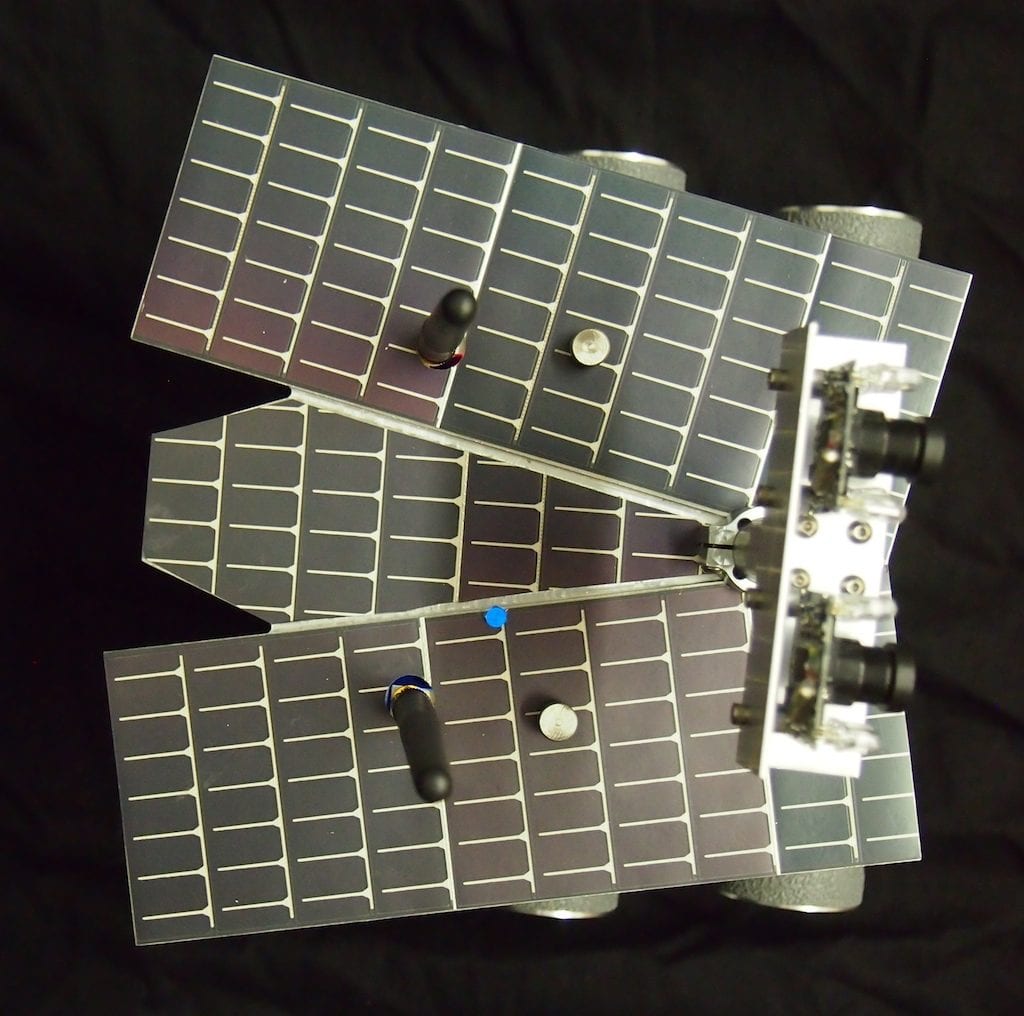
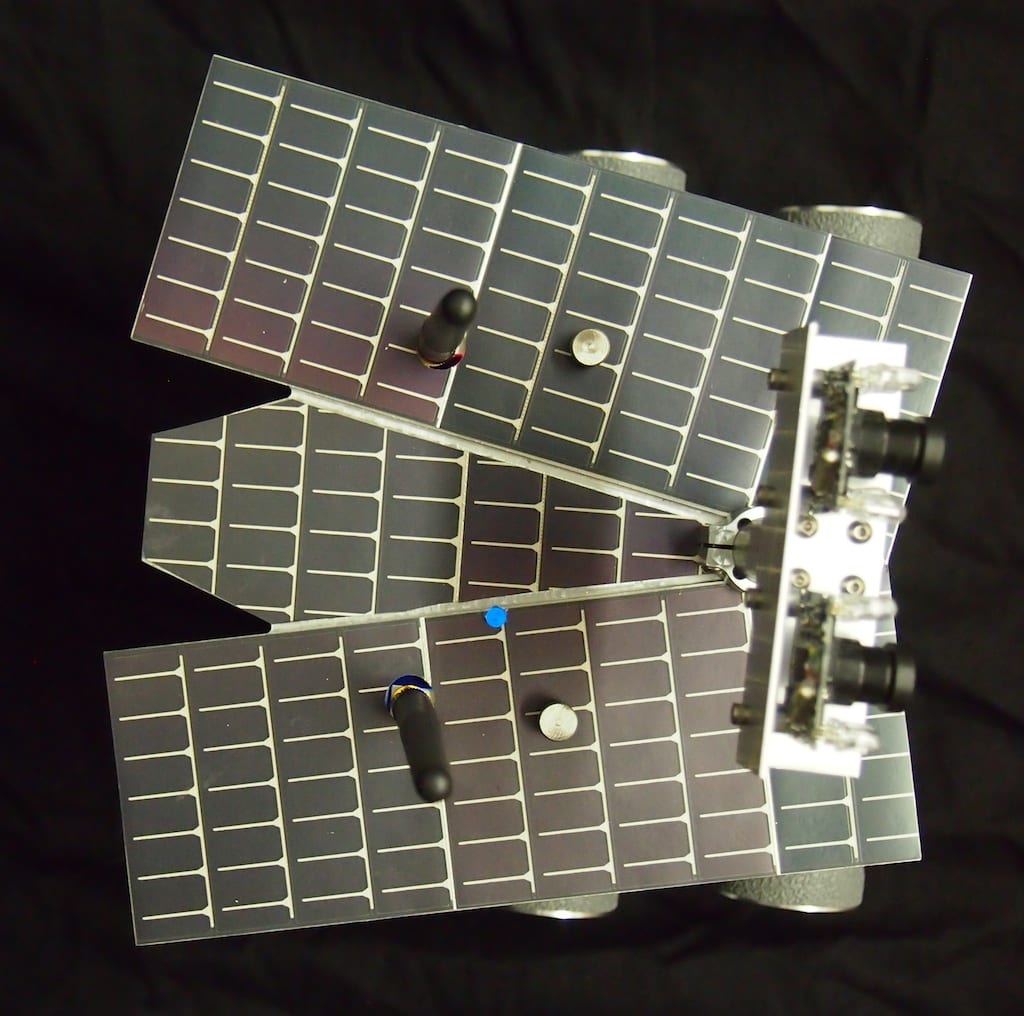
Mini Mars Rover – Top View 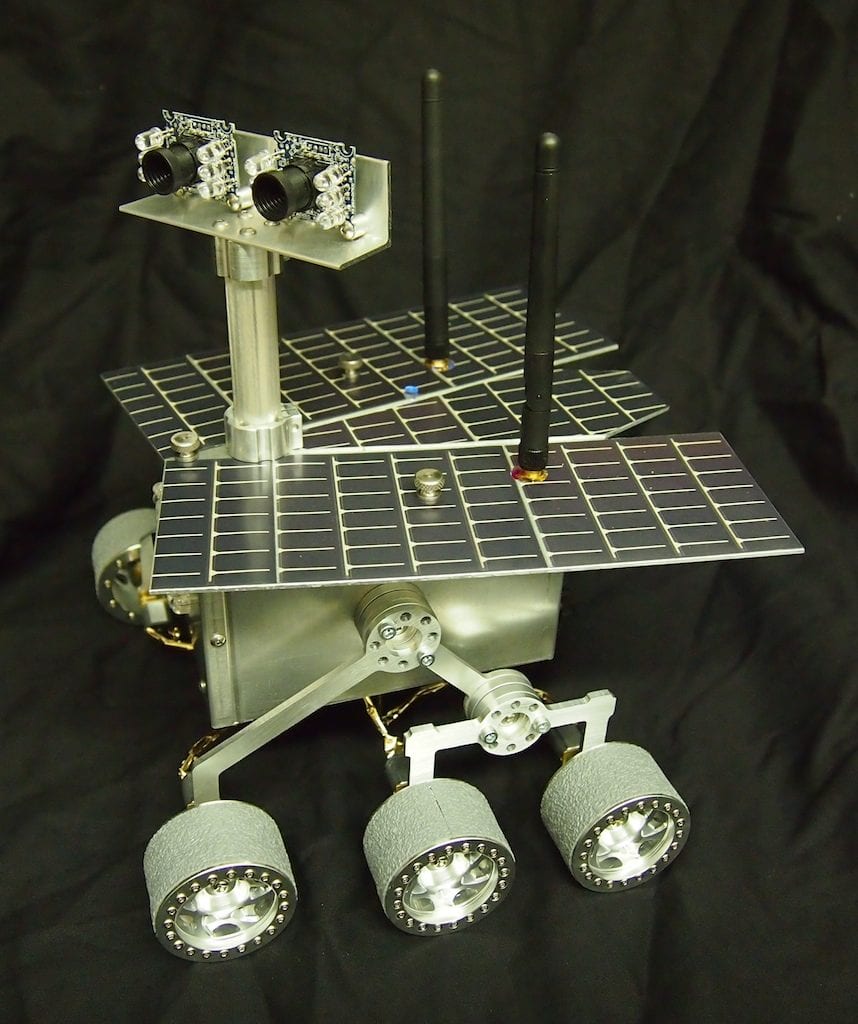
Mini Mars Rover 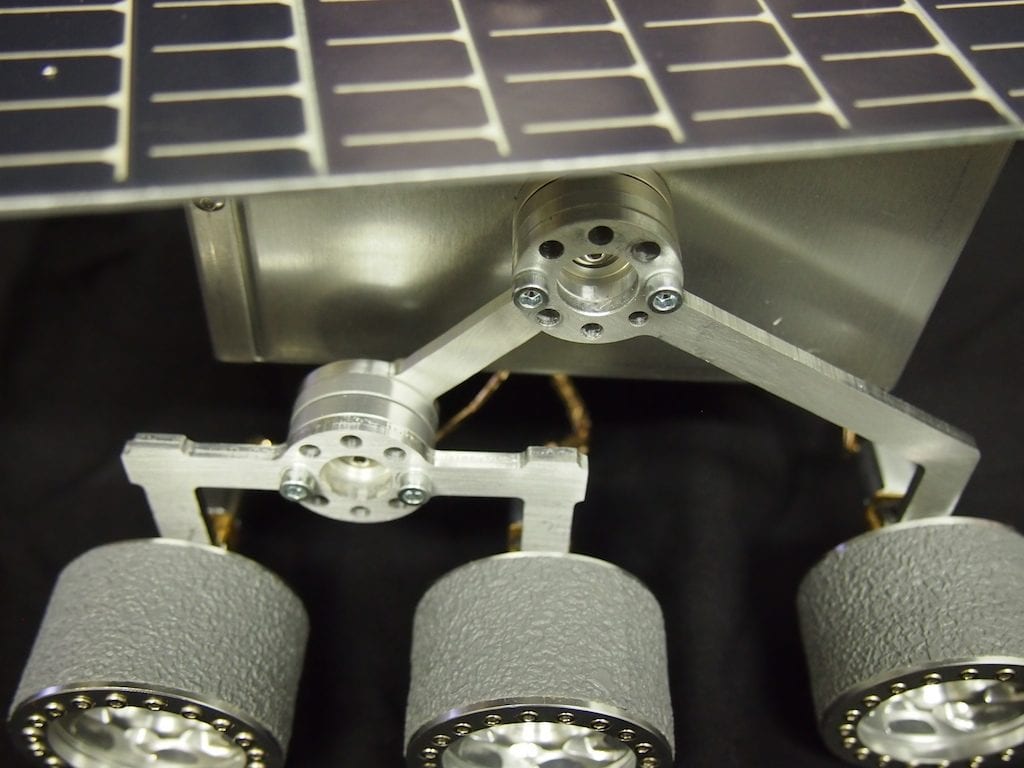
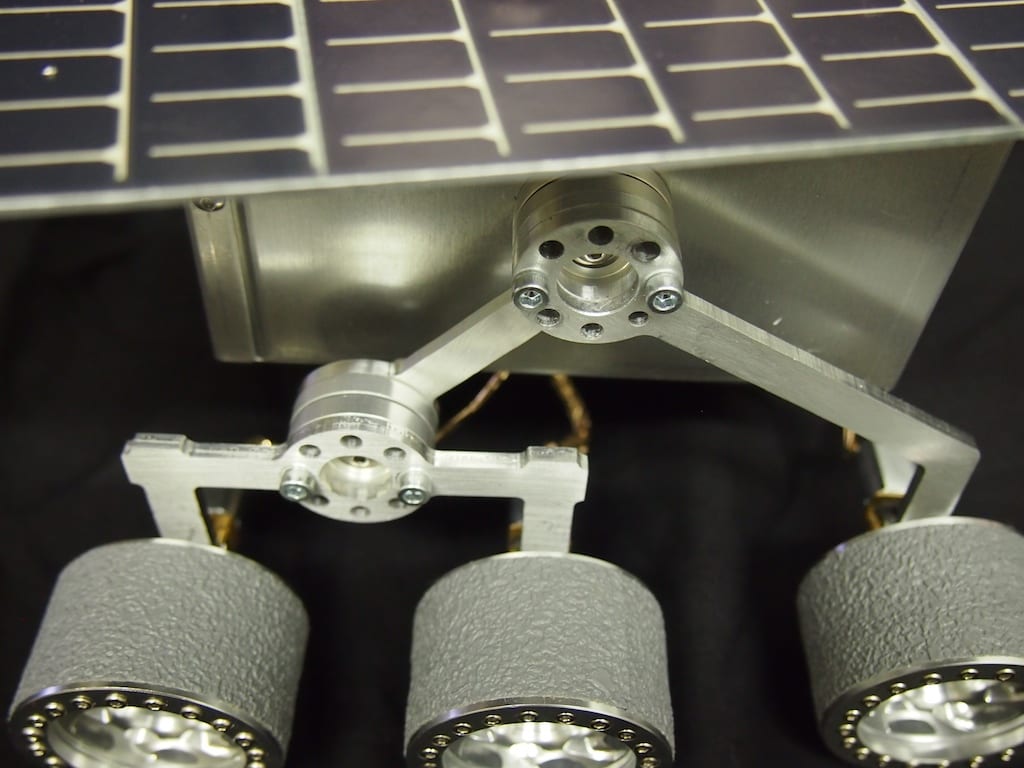
Mini Mars Rover – Rocker-Bogie Suspension System Close Up 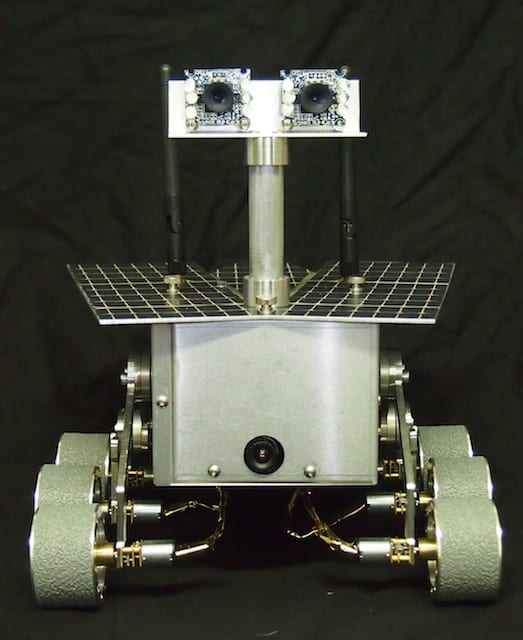
Mini Mars Rover – Front View 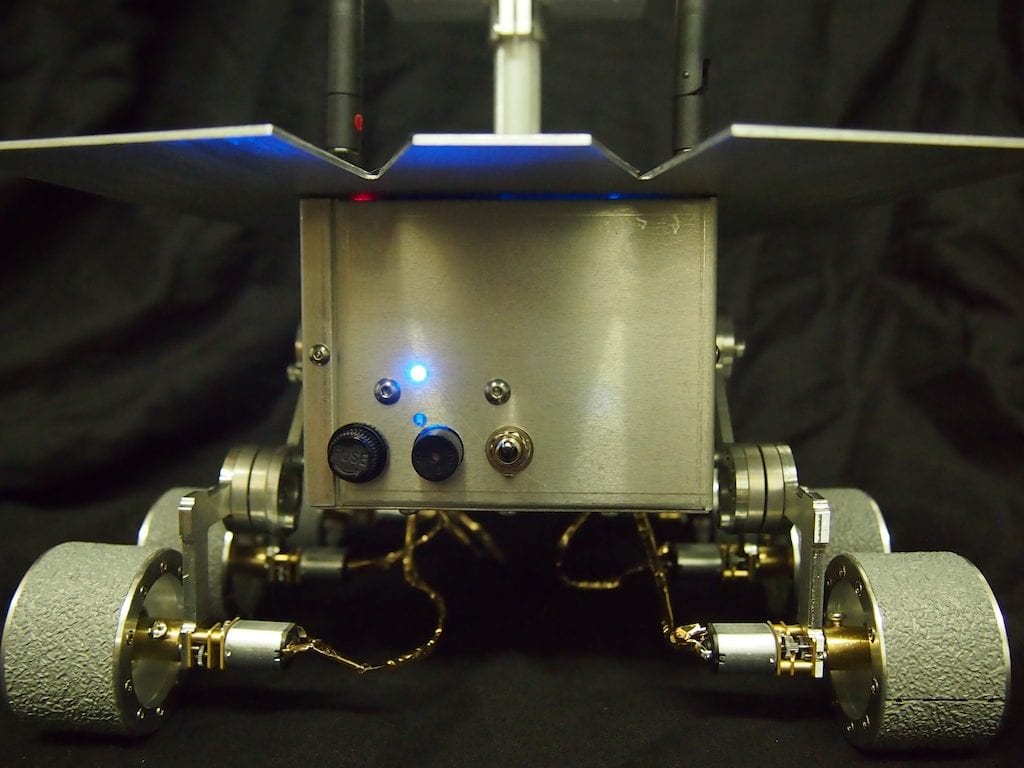
Mini Mars Rover – Rear View

Mars Rover Top Plate immediately after it has been CNC machined but before the solar panels have been applied. 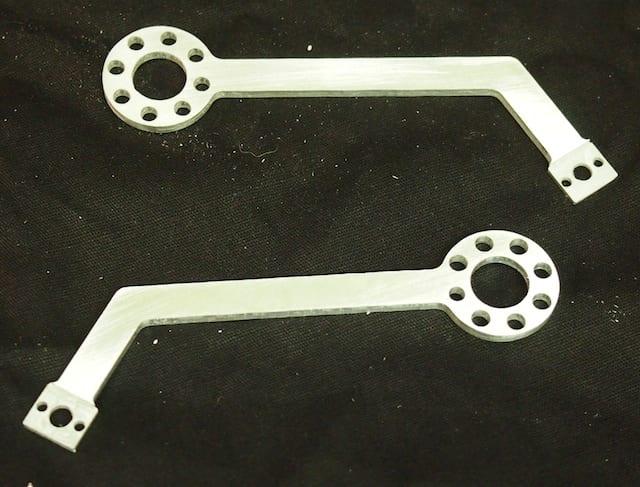
Front Arms with motor mounts 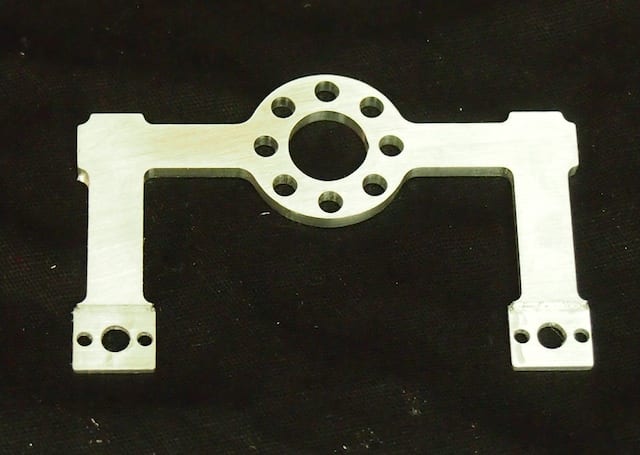

Rear Arm 
Mini Mars Rover Back Plate, Bottom Plate, Front Plate, and Side Plates. The newer version has a smaller hole for the camera.

Very nice. Do you drill the edge holes prior to bending the sheet metal? Any problems with alignment if they are pre-drilled?
The wheels are really nice. What is the tread material?
Thanks
Brian and Jordan, Thank you. The sheet metal is pre-bent, then the edge holes are drilled. Great resource here: http://www.lmbheeger.com/products.asp?catid=71 We then use our CNC to drill the hole patterns (although you could do that manually also). The components of the rocker-bogie suspension system we cut out of aluminum on our CNC. The wheels are commercial, but instead of putting normal rubber tires on them, we put 1″ wide “non-slip” tread strip (like an office building would put on a stair tread of an outdoor stairway). It works really well and it gives it a great look.
Yes, the stair tread looks great. Looks like it has some traction but its still very clean and low profile. How does the mini rover turn? Is there a steering mechanism on each wheel or does it pivot by reversing the wheels on one side? BTW, who makes the wheel? Thanks again for sharing your projects!
Our full-sized Mars Rover has very powerful servos that rotate the wheels so that the entire robot can robot in place. But on the Mini Mars Rover, we chose not to use steering servos (for size reasons). Instead, we use differential steering (like a tank). It works extremely well on most surfaces. Here is some footage of the Mini Mars Rover turning. Jump to time 1:13. https://vimeo.com/69354973
please provide us circuit diagram of above project