We are currently building a rover similar to the Mars Rovers Spirit and Opportunity, which we have always loved (but have been way outside our skillset in the past).
We have been studying the details of the rovers, their electrical systems, chassis, wheels, and so on. Ours won’t be exact, of course, but hopefully, if all goes well, it will be a nice working model, including the solar panels.
One of the most unusual and characteristic elements of the Mars Rover design is what they call a rocker-bogie suspension system (http://en.wikipedia.org/wiki/Rocker-bogie), which is intended to help the rover go over rocks. This system involves six wheels, with a special interconnection between the various wheels so that at least one or two of the wheels on each side are on the ground at any one time, even when going over obstacles. It took a while to figure it out, but this design requires a connection between the wheels and each side such that when the wheels on one side go up over a rock the wheels on the other side go down and vice versa. NASA uses what they call a “differential” (although it’s not the same as a car differential).
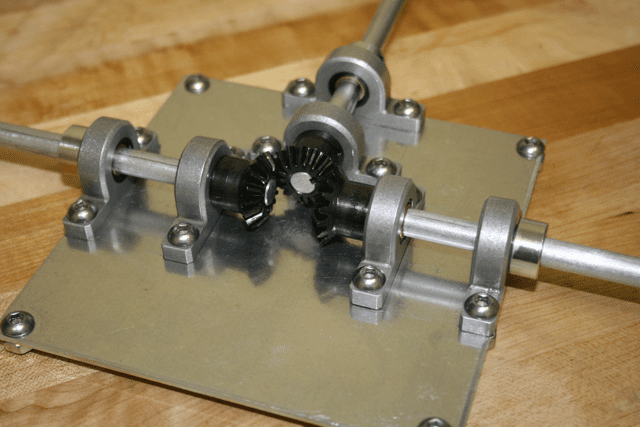
Anyway, we couldn’t find a counter rotating differential that met the requirements, so we decided to make made one. We’ve attached a picture. The plate, pillow blocks, and shafts are made out of aluminum. There are three bevel gears, which are made out of steel. This gear box will go inside the center of the robot’s main box directly between the wheel sets on each side. The way we’ve meshed the gears together creates a counter rotating shaft so that when one side goes up the other side goes down.

Counter Rotating Differential for Mars Rover

From Above

Close up of bevel gears

Where did you find the gears? Did you make them? I would like to start working on some custom projects myself!
We bought the three bevel gears from McMaster-Carr, along with the bushings, aluminum keyed shaft stock, the button-head hex machine screws, and the aluminum plate stock. Originally, we looked at buying a counter-rotating differential gearbox, but when we couldn’t find one that fit our needs, we decided to build it out of raw materials. The McMaster-Carr site is awesome.
With that differential, if one leg is up on a rock, and the other leg is on a flat surface. Won’t the differential try to rotate from the leg on a rock, but the other leg on a flat surface prevent motion? Or is the motion transferred to the body at half the angle of attack? If that is the case, can you explain it to me?
Cheers,
Daniel
The three 45 degree bevel gears in the center of the box cause the motion of the legs to be “averaged.” This keeps the main box more level (less tilted) than it normally would be when going over large,uneven obstacles. If one leg goes over a rock, an opposite force is applied to the other leg. So, if one leg goes up, the other leg goes down. This downward force onto the opposite leg helps the robot maintain traction in the leg that’s still on the ground.
Thanks for the response. So if the one leg cant be pushed down in the ground (on a hard surface lets say) then the motion will be translated into the body at half the angle or rotation?
Also, how do you keep the rods from sliding anywhere? If I just have holes for bearings and rod into gearing, (I’m doing a spur gear design) How do I ensure that the rod will not move in and out?
Thanks,
Daniel
The bevel gear has a hex set pin that holds the gear onto the shaft. The shaft rotates inside the pillow blocks. The other end of the shaft is held in place by a collar, which has a hex set pin to hold it against the shaft. McMaster-Carr carries these items, as well as other places.
Is there a lot of friction from the collar against the bearing?
No, there isn’t a lot of friction. Friction is definitely not the problem or challenge on this. Getting the gears to align and mesh properly is the greater challenge, but it works OK even if they aren’t lined up exactly.
They are 6 Volt motors. Even if you ran them at a full 7.2v, they would be fine with the loads epseentrd by a micromouse. A couple of things make the voltage relatively unimportant. First, there will be some loss in your motor driver so you may well not get as near to 7.2 V as you think. Second, these motors are very overpowered for a micromouse and you may find you never get to run them at full 100%PWM. Or not for long anyway. Acceleration from a standstill only needs about 0.75V. Do the sums, that really is all. Worst case is acceleration/deceleration while running at top speed. Then you may need all of the battery voltage to get enough current through the motor because of the back-emf generated by a turning motor.To summarise The motors rarely run at full voltage. Even then it is not for long. They never get warm to the touch they are horribly overpowered.
Will those bearings work in the vacuum of space?
Or are there special bearings for this situation?
Do you know of any companies that would sell such bearings?
What is the central output shaft connected to? All your pictures have that part cut off.
can u tell me why did you use bevel gears ?what is the use of that
The central output shaft is connected to the struts that are connected to the wheels on the side of the rover.
We used bevel gears because we wanted to reverse the direction of rotation.