Lunar Rover
Prototype for Lunar X-Prize mission
We built this prototype Lunar Rover for SpaceLS (an aerospace company in the UK) for their Lunar X-Prize mission.
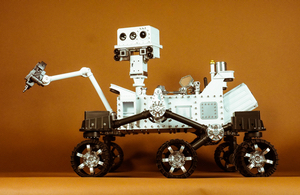
Curiosity Mars Rover
Our fully-functional 1/10th scale replica of NASA’s most recent Mars Rover
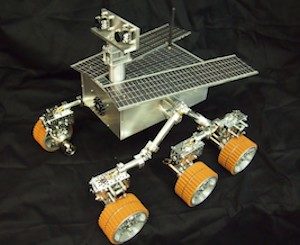
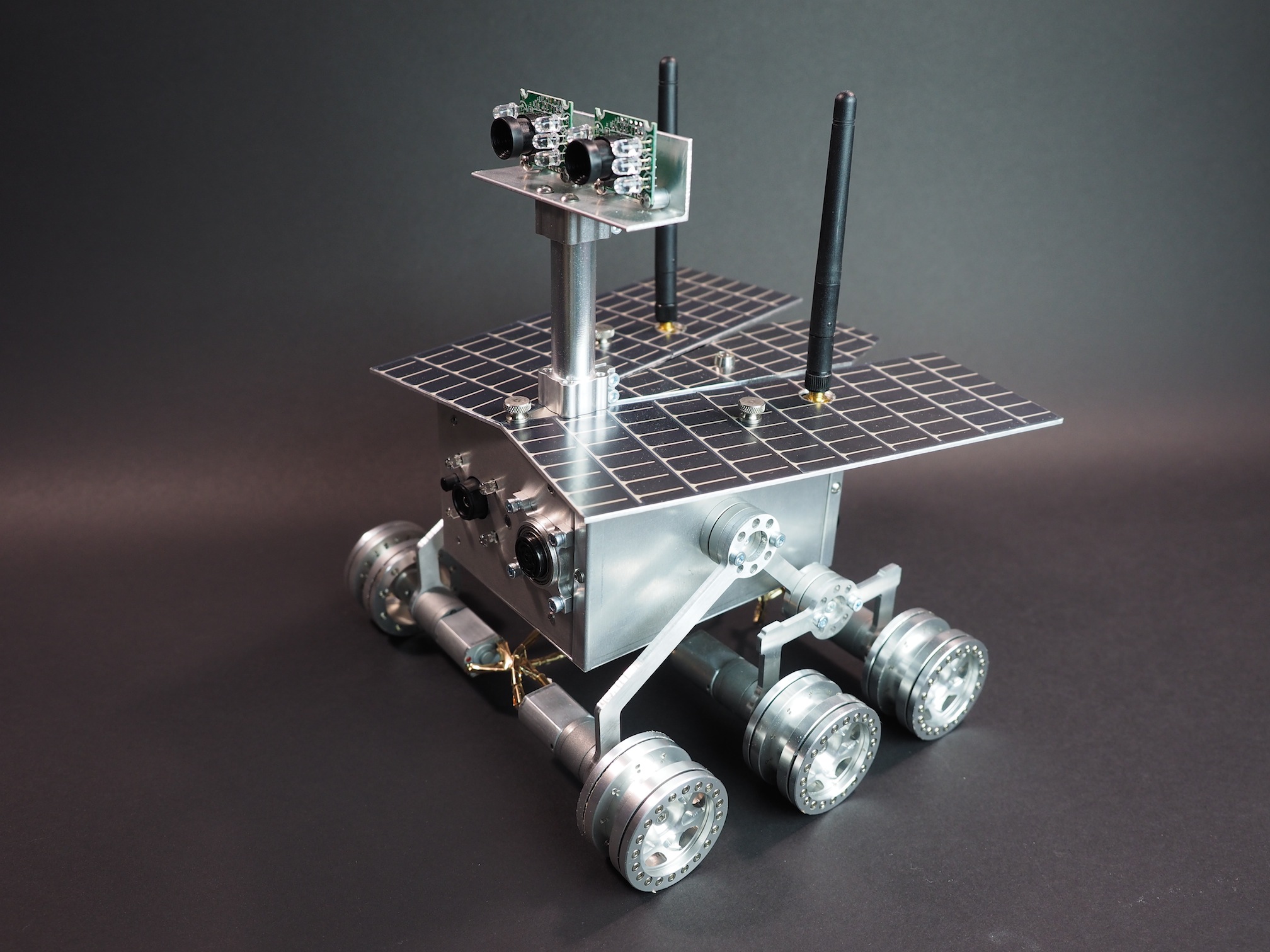
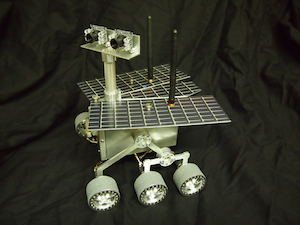
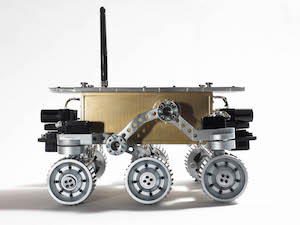
Mars Rover
New York Hall of Science
We built two of these Mars Rovers for the New York Hall of Science. Each one includes a 6-wheel rocker bogie suspension system, servo steering, solar panels, ultrasonic sensors, infrared imaging video camera, and autonomous command execution.

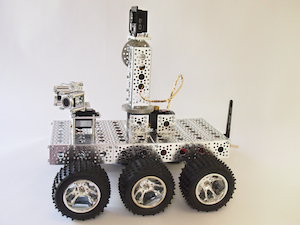
Educational Robot
The 6WD “Challenger” Educational Rover was designed with its electronic components visible for educational purposes.

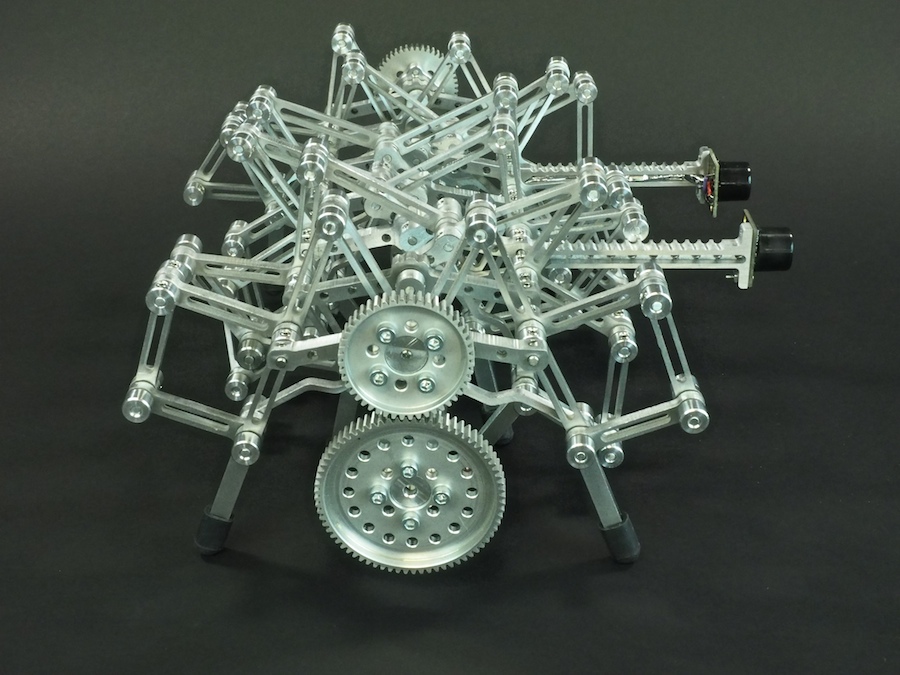
Aluminalis
An autonomous 16-legged walking creature with a mind of her own. Her brain is an Arduino Nano. Her eyes are sonar sensors. She likes to crawl out from under the workshop cabinets, but she’s shy, so when someones comes, she scurries away from them.

Lunokhod Russian Lunar Rover
We constructed this 1969-era Russian Lunar Rover for a space museum in Prague.

Creepy Crawler
Our first, but not last, venture into biologically inspired robotics.
Alumini
Our autonomous 12-legged little beastie
Kuala Lumpur Mini Mars Rover
Mini Mars Rovers for two science centers in Kuala Lumpur
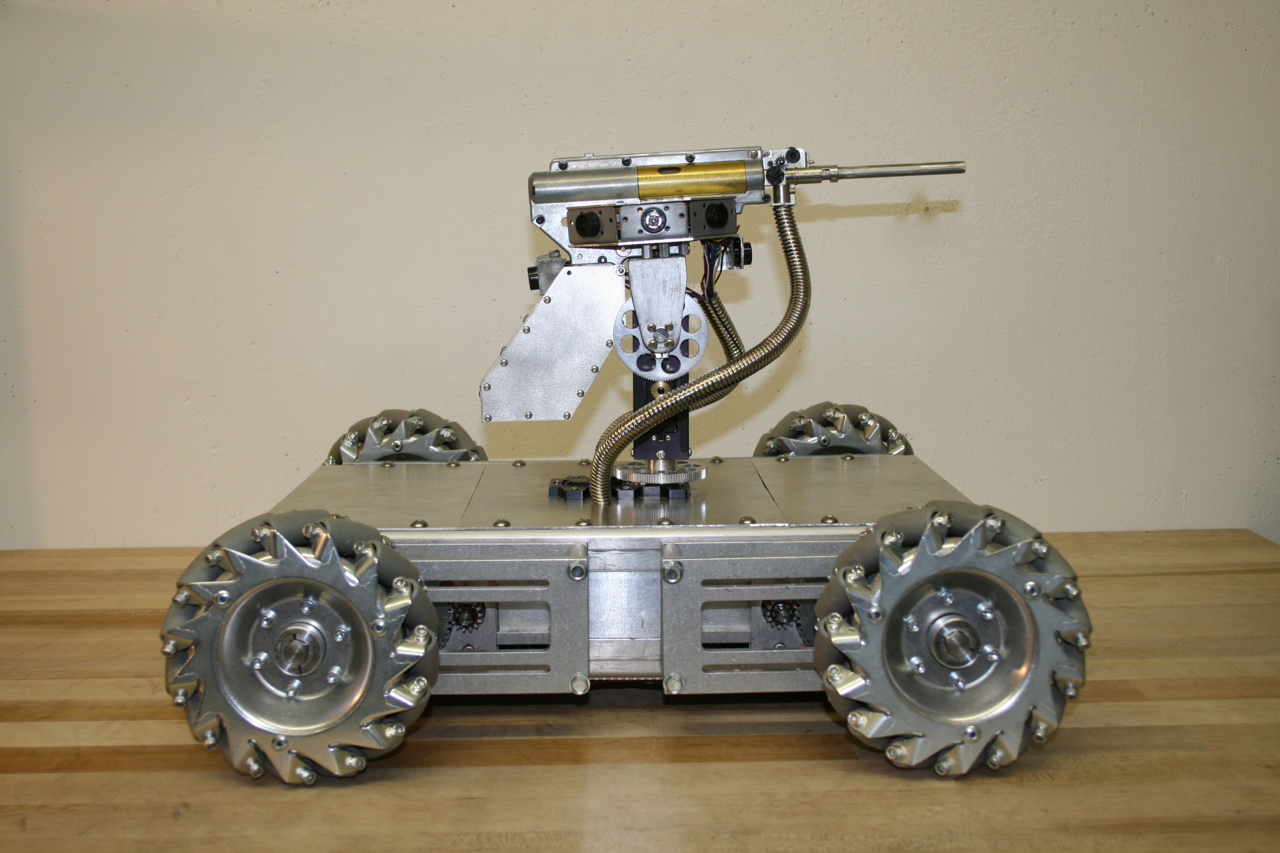
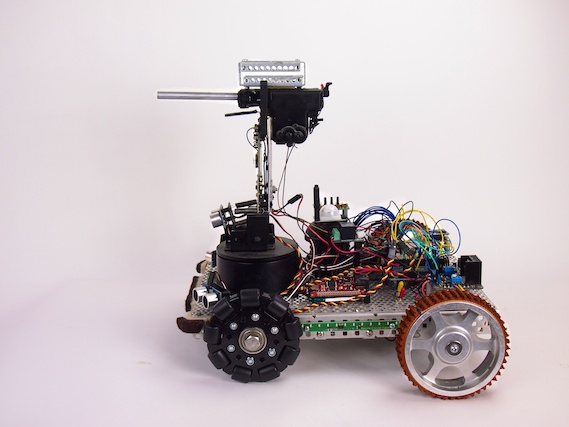
Mechatron
Mechatronic tank with armor plating, 4WD strafing drive system, and an electric gun on a 360-degree gun turret.
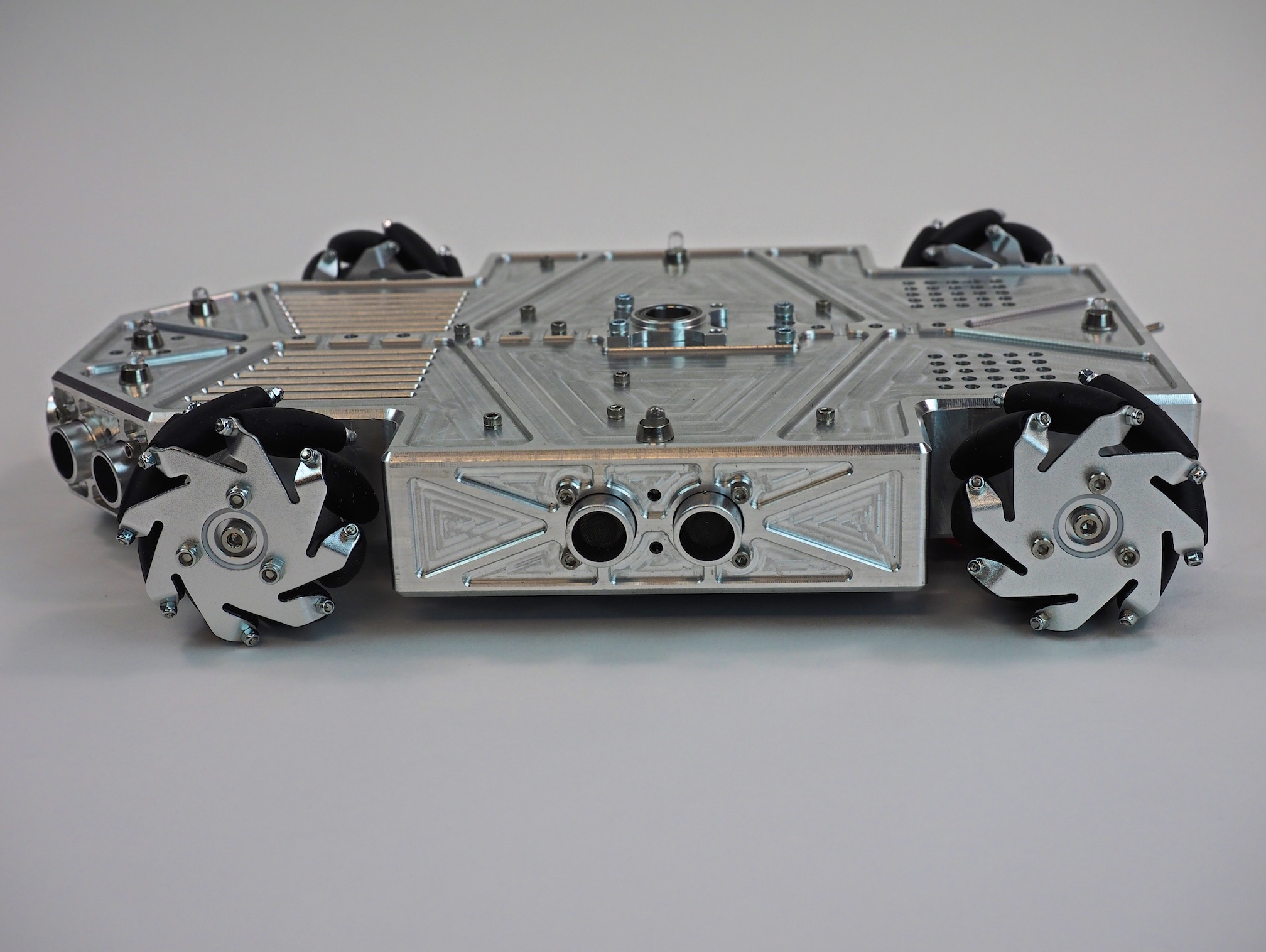
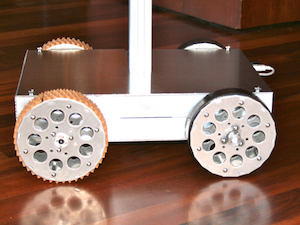
Metalbot
Autonomous mecanum-wheeled rover we machined from a single block of metal.

Telegraph System
We refurbished various pieces of old telegraph equipment from the 1800’s, mounted them into boxes, and rewired them with Arduinos and Xbee radios to create an old-looking, but high-tech long-range wireless telegraph system.
Actobot
Actobotics asked us to create a robot of our own design using parts from their new product line. We came up with this cool multipurpose rover platform.
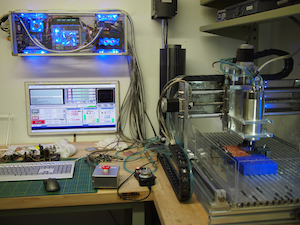
CNC Mill
We use this CNC Mill to machine our custom aluminum parts.
Trekker
Our all-terrain rover with 6 wheel independent suspension, GPS-based waypoint navigation, and ultrasonic object avoidance.

Terrabot
Our gnarly all-terrain self-navigating rock crawler.

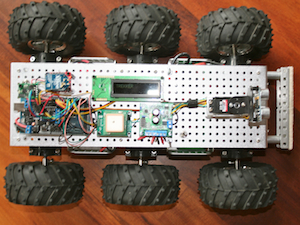
Tinybot
On this agile little robot, we packed an Arduino, Xbee radio, motor controller, 2 gear motors, and a LIPO battery beneath the CNC-machined aluminum top.
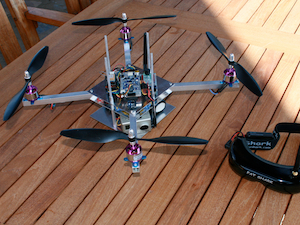
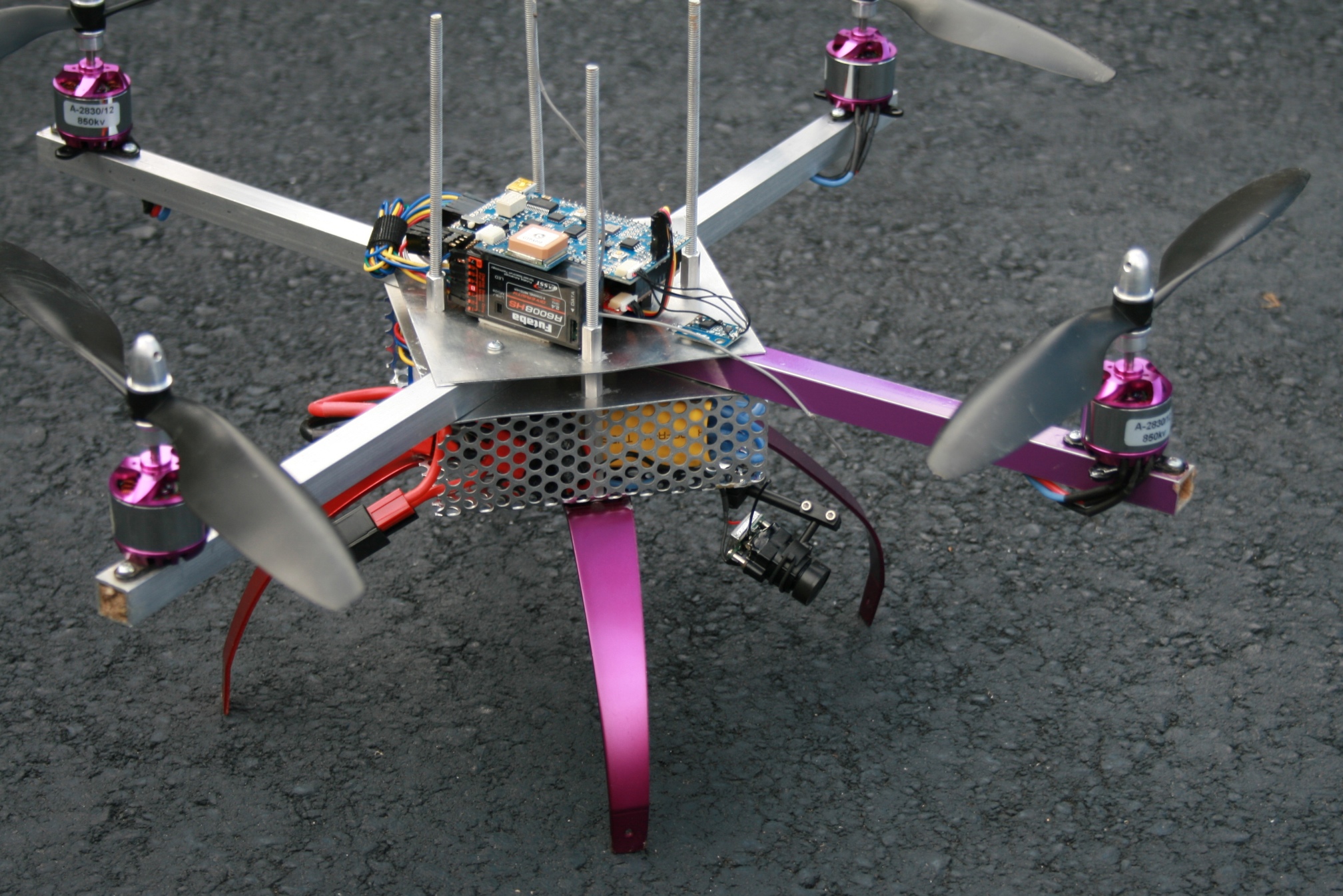
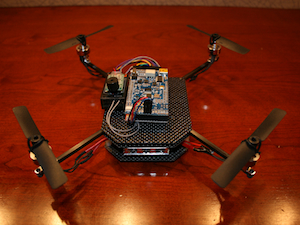
Flying Drone Robot
Equipped with automatic take off and landing, GPS navigation, sonar for terrain following, a GoPro for HD video recording, and video goggles for FPV flying.
Flyer I
Our first flying robot drone, with insect-like curved legs and a mini FPV camera.

Black Dragon
Our carbon fiber Arduino-based drone with automatic take off and landing, GPS navigation, and ultrasonic terrain following.
Black Hornet
Our tiny carbon fiber flying drone robot.
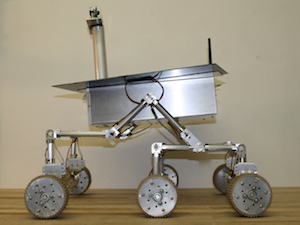
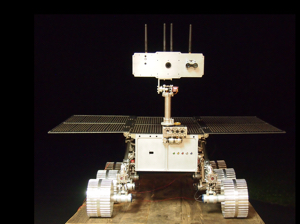
Spirit II Mars Rover
An early prototype of our Mars Rover, including solar panels, a counter-rotating universal joint, and a 6-wheel rocker bogie suspension system.
Mini Mars Rover
We built three Mini Mars Rovers for a hands-on museum exhibit in Europe.
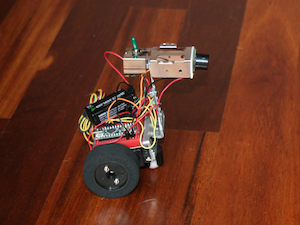
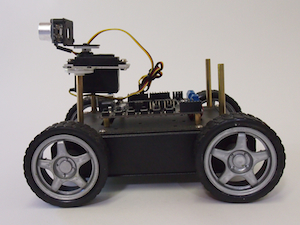
I.C. 123
We made this little sonar-equipped roaming robot out of spare hardware bits we found around the shop.
KitBot
We designed this kit as an example of a relatively low-budget project that parents could do with their kids.
Telegance
MacMini-based telepresence robot that provides Internet-controllable mobile wifi video conferencing.
I.C. 12 Droid
Our first robot. Inspired by a Star Wars droid.
Security V
This was one of our early security robots with an automatic Airsoft pellet gun.
Sojourner Mars Rover
for NASA Kennedy Space Center
We built this Sojourner Mars Rover for an upcoming permanent exhibit at the NASA Kennedy Space Center. We are currently working toward authorization for an 8 robot installation including Sojourner, Spirit, and Curiosity rovers.