by Camille | News & Media, Workshop Blog
In 2014, President Obama invited us to the White House! It was amazing to walk into the White House and set up our robots in the Grand Foyer. The President and many others came through to talk with us and see our robots, including cabinet members, senators, CEOs of tech companies, deans of universities, and techno-dignitaries from across America. We met and talked with the Director of the National Science Foundation (NSF), top officials from NASA and the Navy (who tried to recruit me!), Dean Kamen (inventor of Segway, FIRST Robotics, etc.), Dale Dougherty (Founder of MAKE Magazine & Maker Faire), and many others. The famous rapper/activist will.i.am drove our Mars Rover around the White House! But the best part was when everyone poured into the East Room and the President gave a big speech to the nation. He talked about us as shining examples of American entrepreneurialism. When he asked us to standup, the whole room burst into applause. It was awesome. —Genevieve & Camille
Here we are in front of our robot exhibit in the Grand Foyer of the White House…

Our robot exhibit in the Grand Foyer of the White House…

Here we are with Dale Dougherty, CEO of Maker Media, founder of the Maker Faire, and publisher of MAKE Magazine.

Beatty Robotics in front of the famous portrait of JFK in the White House.

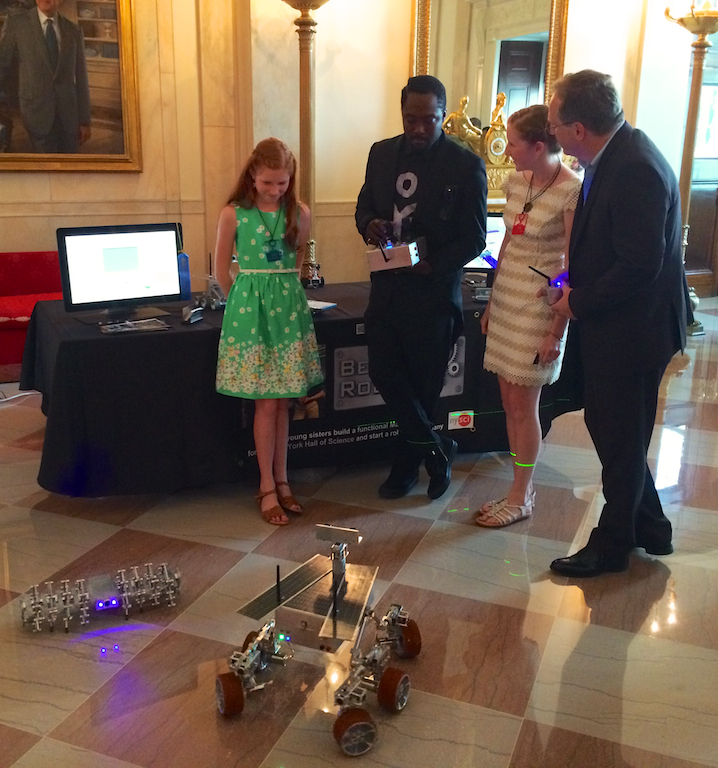
Hundreds of dignitaries and VIPs attended the event. Here, Genevieve is explaining the technical details of the robots to one of the visitors.

The famous rapper/activist will.i.am is committed to science education in the inner cities, so he was one of the people who dropped by our exhibit. We taught will.i.am. how to drive the Mars Rover and our Aluminalis robot around the Grand Foyer of the White House! will.i.am showed intense interest and knowledge in the technology of robots and we talked in detail about his involvement in FIRST robotics and other society-oriented initiatives.
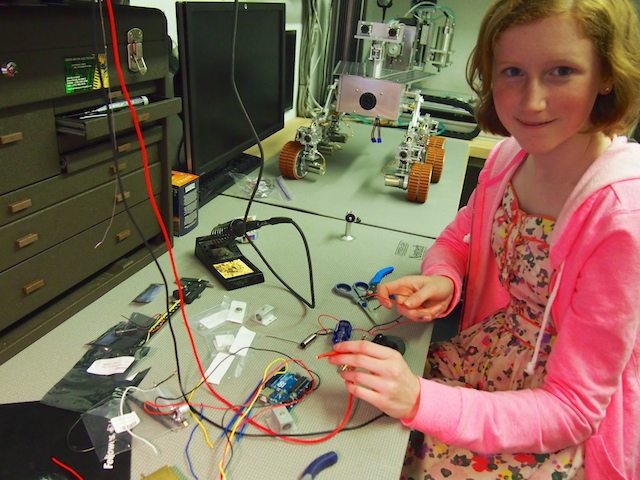
Here is Camille making a little electronic tweak to one of the robots while Genevieve talks with one of the visitors…

It was a great honor to be invited to the White House and to be part of this historic event. We would like to thank the New York Hall of Science for their encouragement and support, and for lending us their “Genevieve” Mars Rover for a few days. We would also like to thank the staff at the White House, all of whom were warm, welcoming, and excellent to work with. We would also like to thank our mom for remembering to take pictures with her iPhone during the exciting chaos of the event. —Genevieve & Camille
by Camille | Workshop Blog
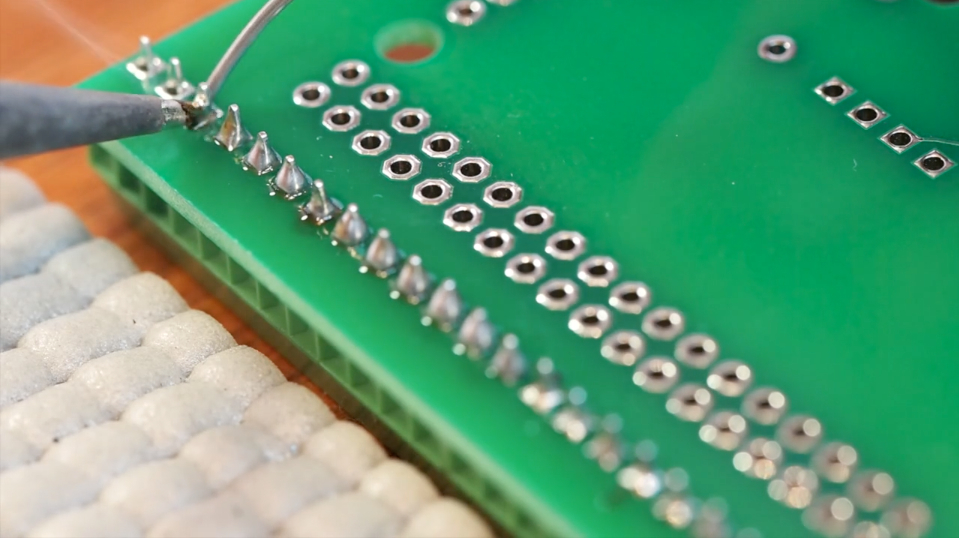
We are in the process of upgrading the first Mars Rover that we built for the New York Hall of Science. The goal is to upgrade its electronics so that the museum’s two rovers are identical and interchangeable. Here is a very brief video of Genevieve soldering the “Mars Rover Shield” that we designed. The shield, which is a complex circuit board that fits on top of an Arduino Mega, has 165-solder points, but the video is just a short clip that only shows her doing a few of them. She moves pretty fast, so she can complete a circuit board quite quickly. We used a macro lens on this video to see how close we could get. We like how we can see the solder melting and then solidifying around the pins as she does them. I chose this particular music because that was the music we were listening to when she was doing the work. I thought the lyrics fit pretty nicely: “Because I’m doing this for the thrill of it, killin’ it…”
by Camille | Robots, Workshop Blog
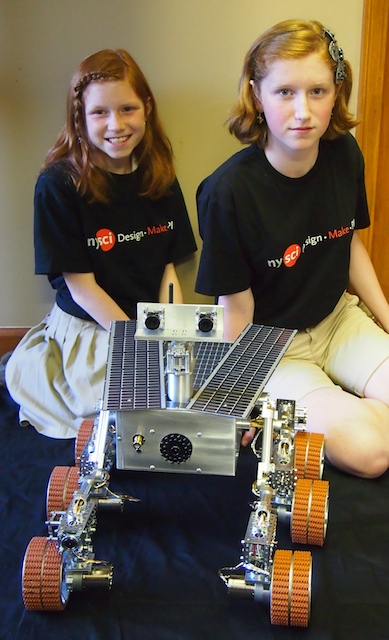
We have exciting news to share. A short time ago the New York Hall of Science contacted us. They have a large and beautiful Mars exhibit, but their existing robot is outdated and needs to be replaced. After some discussion about their requirements, we agreed to build them a new fully-functional Mars Rover robot for their exhibit. You may have noticed that we’ve been chronicling our work on the new rover in our Workshop Blog for the last several weeks. We have done most of the metal machining, mechanical assembly, electrical soldering, electronics wiring, and other work on the project. They will also be part of the on-site testing and installation in New York. Update: We installed the Mars Rover at the New York Hall of Science on June 8, 2013. It has been a great success so far. It has become the science center’s most popular exhibit.
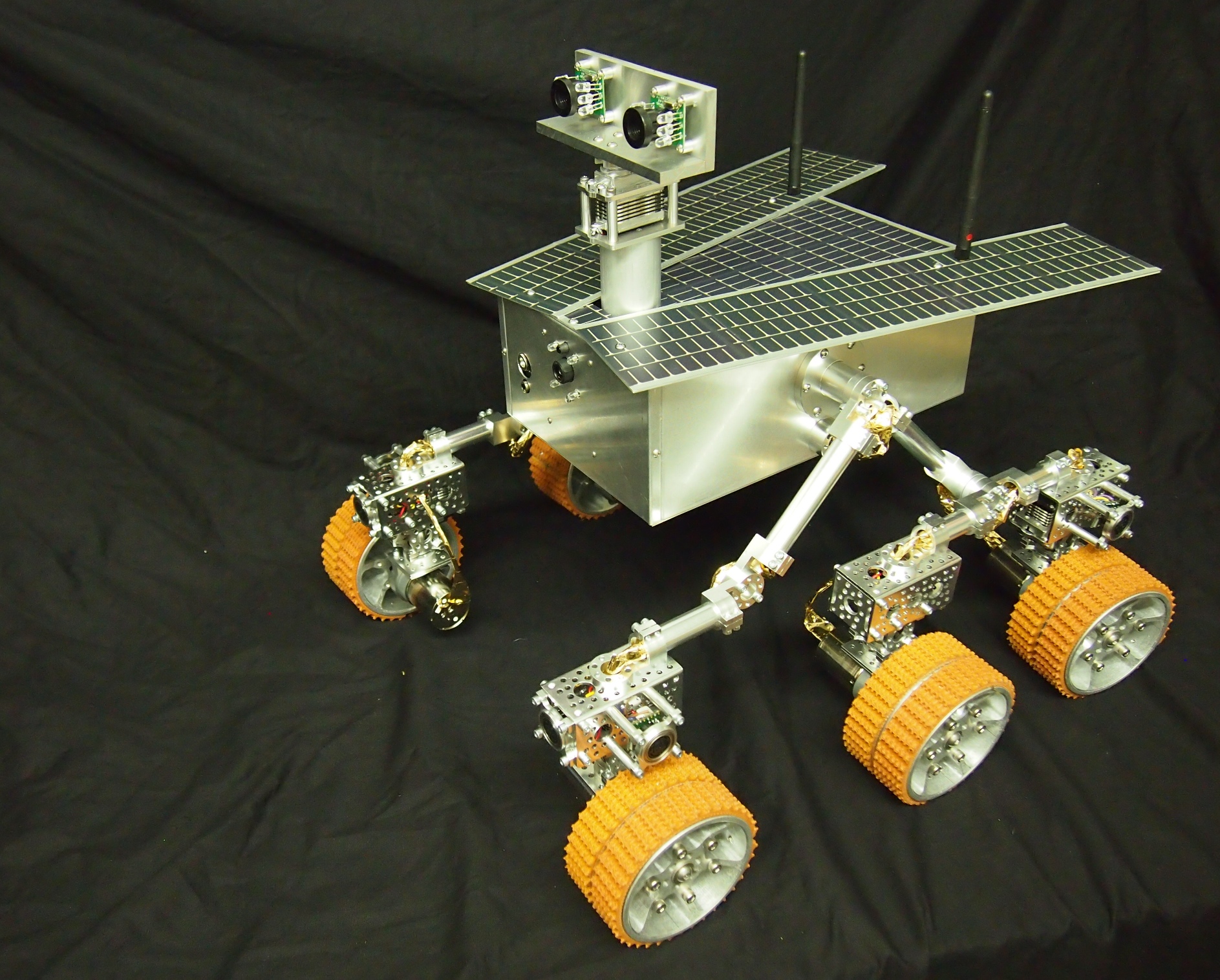
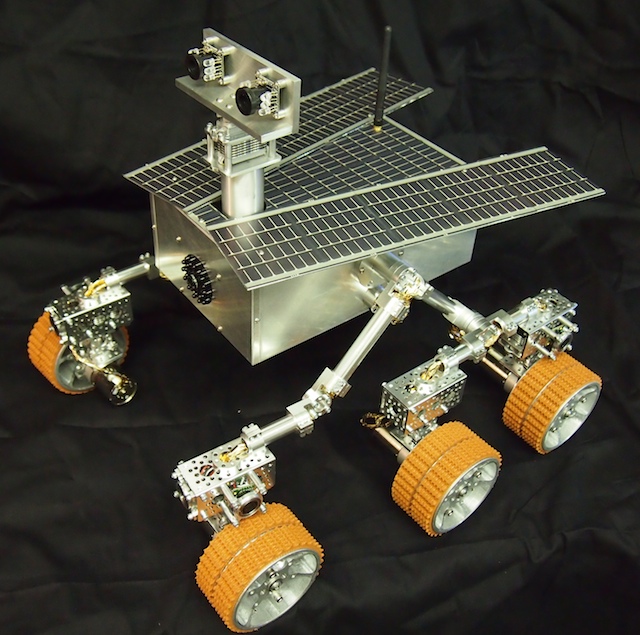
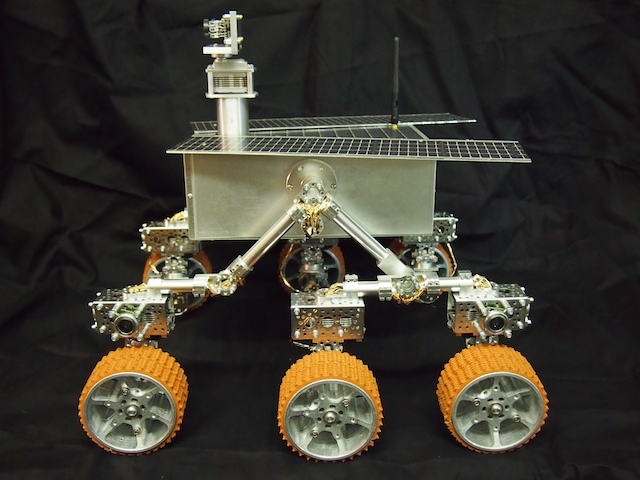
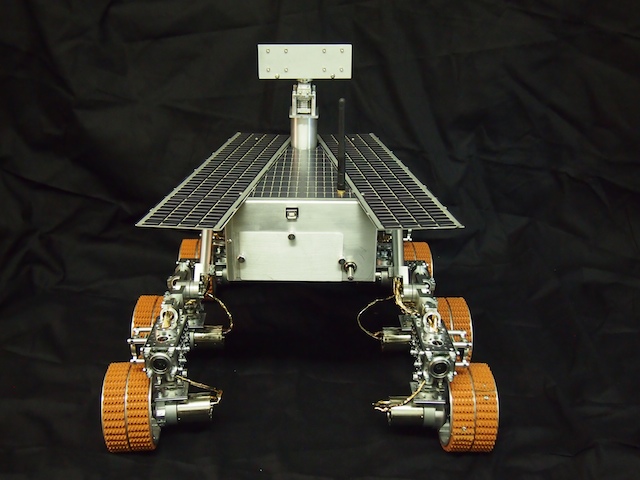
The Mars Rover is constructed of over 700 electrical components, aluminum parts, and other pieces that we purchase, make by hand, and/or machine on our homemade CNC Mill. In addition to the NASA-style six-wheeled rocker-bogie suspension system and the solar panels, the new Mars Rover is equipped with an infrared camera, a thermal array sensor, eight sonar sensors, and other technology. Using special control software that we will provide, kids and other visitors to the center will drive the Mars Rover remotely through the exhibit’s Mars-scape on a mission to find infrared-emitting rocks that may provide evidence of past life on Mars.
With over 450 interactive exhibits, the New York Hall of Science is the largest collection of hands-on science and technology exhibits in the New York City area, and rated as one of the best science centers in the country. They are actively involved in pioneering the Design/Make/Play revolution. Built initially as a pavilion for the 1964 World’s Fair, the New York Hall of Science is not only the region’s premier science museum, it hosts the world-renown New York Maker Faire each fall. We are honored to be working with the NYSCI and we’ve been having great fun (and many hours of hard work) building what we hope will be an excellent robot for them.


OUR POSTS ON THE CONSTRUCTION OF THIS ROBOT:
Our new Mars Rover Arduino Shield
Soldering the Mars Rover Shield
Mars Rover – Adding the Targeting Laser and Thermal Array Sensor
Mars Rover – Mast and Solar Panels
Continued work on the Mars Rover
Mars Rover – Infrared Detection
Making progress on the Mars Rover
Mars Rover – Electronics
Major milestones reached on the Mars Rover
Using CNC to machine the electronics plate for Mars Rover
Cutting metal for the Mars Rover 2
A Counter-rotating Differential
POSTS RELATED TO OUR ORIGINAL PROTOTYPE:
https://beatty-robotics.com/spirit-ii-mars-rover/
Spirit II – Mars Rover: INSIDE VIEW
Solar Power System
Differential for Mars Rover
by Camille | Workshop Blog
A few subscribers have asked about laser and the thermal array sensor on the new Mars Rover, so this post is dedicated to that:
We needed to add a targeting laser and a thermal array sensor to the Mars Rover robot, so we experimented with different wavelengths of lasers and types of lenses. After looking at the results of our tests, we decided on a 532 nanometer laser (which is bright green in color), with adjustable 5 to 25 milliwatts of power, and a 38-degree line-generating lens.
We plan to use a TPA81 Thermopile Array sensor to scan the temperature of the objects that are out in front of the robot (a few feet or a few yards away). This particular sensor provides an 8 x 1 array of eight temperatures corresponding to eight points from left to right in front of it (about 40 degrees across). But it’s hard to tell exactly where it’s pointing and which objects it’s measuring, so we plan to use the laser to identify the scanning zone. We cobbled together a prototype and our initial tests of all this worked well, so we moved into the final build stage and mounted it into the robot. The key was to make sure that the laser was lined up with the thermal array sensor, which necessitated a special mounting mechanism.
Here I am with a devilish grin as I experiment with different types of lasers. I decided on the green laser because it’s strongest, easiest to see, and “just plain the coolest.”

I used my favorite tool, the vertical mini mill, to do some machining to modify the laser mount. We then drilled and tapped various threaded holes into the mount.

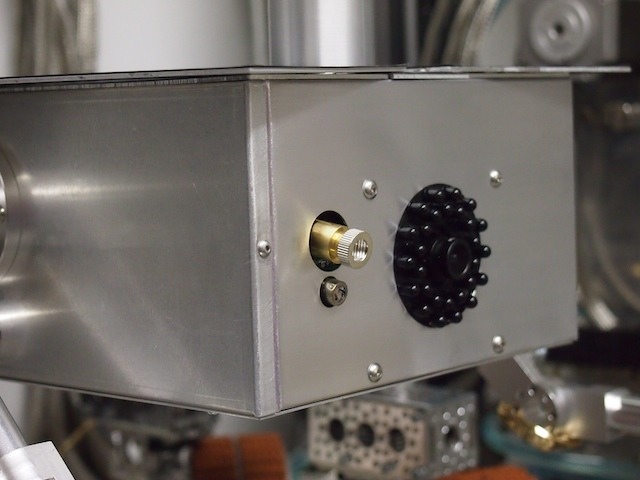
Here is the finished Laser Mount. The laser fits in the large hole in the middle and is held with a set screw through the threaded hole on the side. The threaded hole on the bottom is used to attach the mount to the articulating arm. The threaded hole on the face (top in the picture) of the mount is used to attached the Thermal Array Sensor. This way the Laser and Thermal Array Sensor are screwed together and always pointing in the same direction/angle.

Here we have mounted the Target Laser (on top) and the Thermal Array Sensor (on the bottom) into the front of the robot (front plate removed). You can’t see it too clearly in this picture, but the laser mount sub-assembly is mounted on an articulating arm on a base so that we can adjust the pointing angle/direction. Please note that the line generating lens is tilted in this picture and needs to be adjusted so that the visible lines in the lens are vertical (which is weird because it generates a horizontal line).
The finished result. We’re ready to scan some alien Martian life ! (Or at least some warm rocks!) 🙂

by Camille | Workshop Blog
We’ve been busy working on the new Mars Rover. Over the last few days we’ve been focused on the chassis, the thin-film solar panels for the top, the mast, and aligning the servos for steering. Pics below.
Here I am using my new power driver to work on the robot’s chassis. This is now my favorite tool.
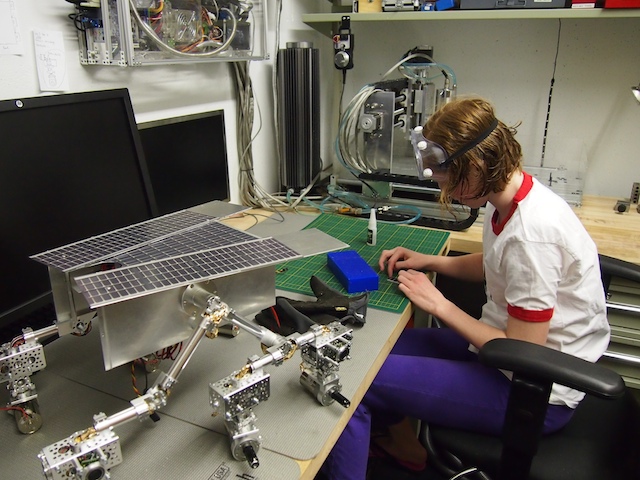
Working on assembling the solar panels that will cover the top deck of the Mars Rover.

The completed “solar wings” and top deck. These are actual thin-film solar panels attached to custom-machined aluminum plates.

We ran into a particular challenge when it came time to build the mast. In the end, we decided to design and machine a custom servo plate using the CNC. The top of the plate will hold the pan servo. The bottom of the plate will hold the shaft tube (using a circular slot).

The custom servo plate mounted on the mast. The plate is held down with a threaded rod that goes down through the mast and threads into the bottom of the rover.

Here is the completed mast assembly. From the bottom up: The robot’s bottom plate, the mast flange, the mast tube, the custom servo plate, the pan servo, the top servo plate, the servo horn, and the mast head, which is made out of two custom machined plates of aluminum.
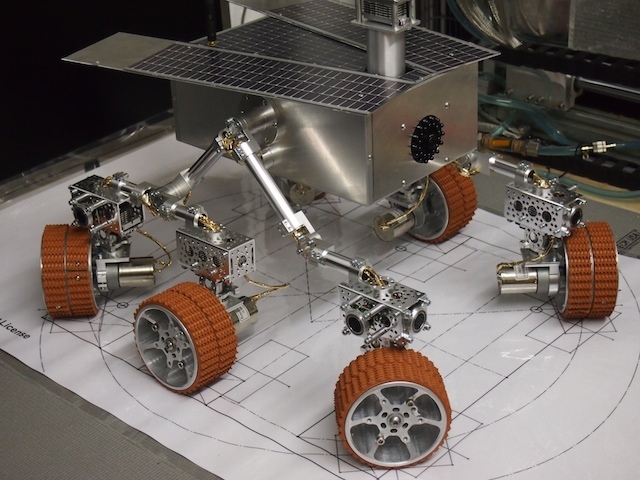
In order to align and calibrate the steering servos we created a special, full-scale drawing that indicates where the wheels should be at each of the various steering positions. This really helped center the servos properly.
