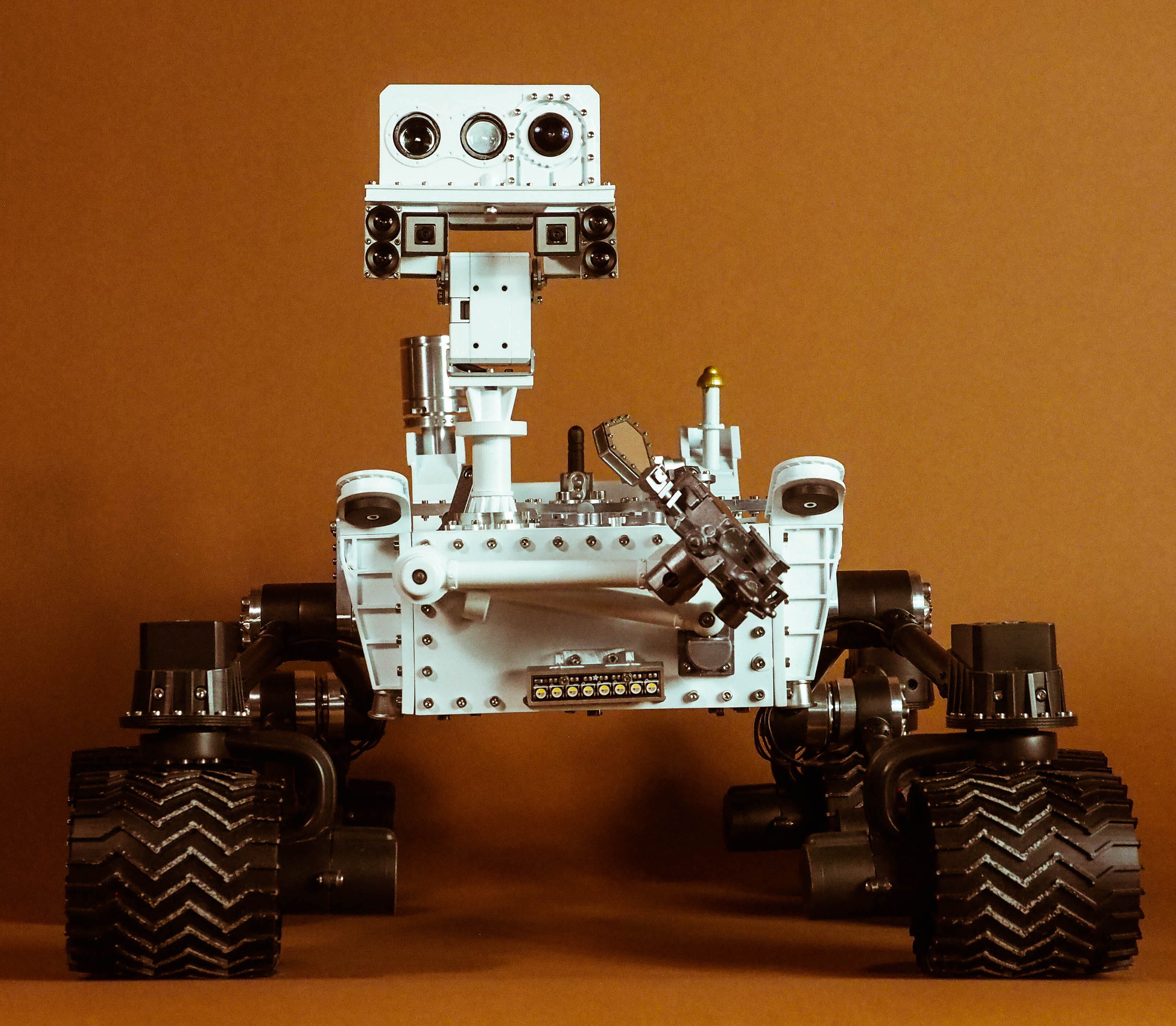
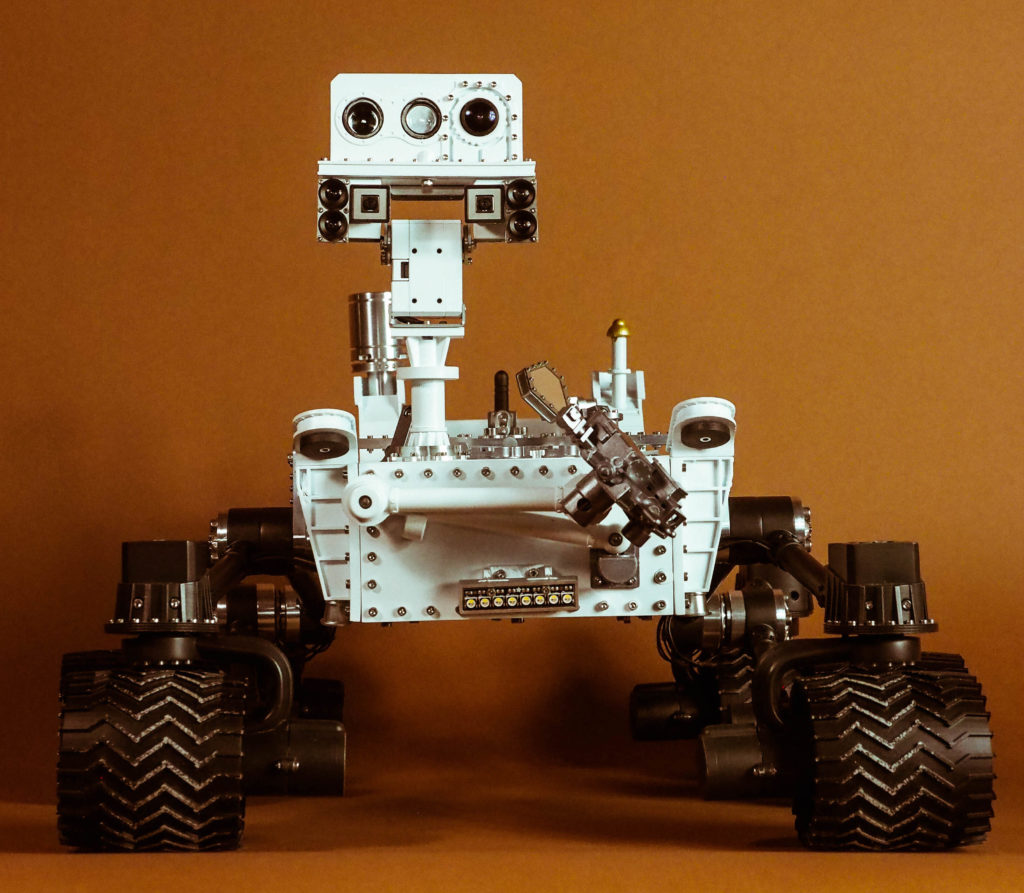
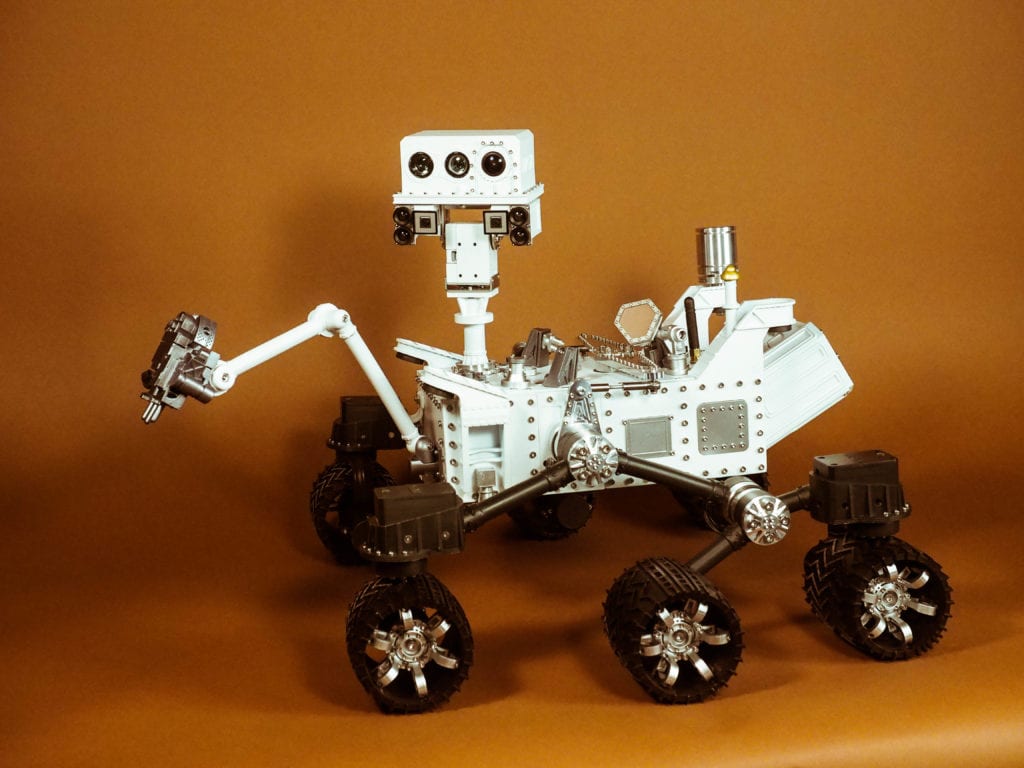
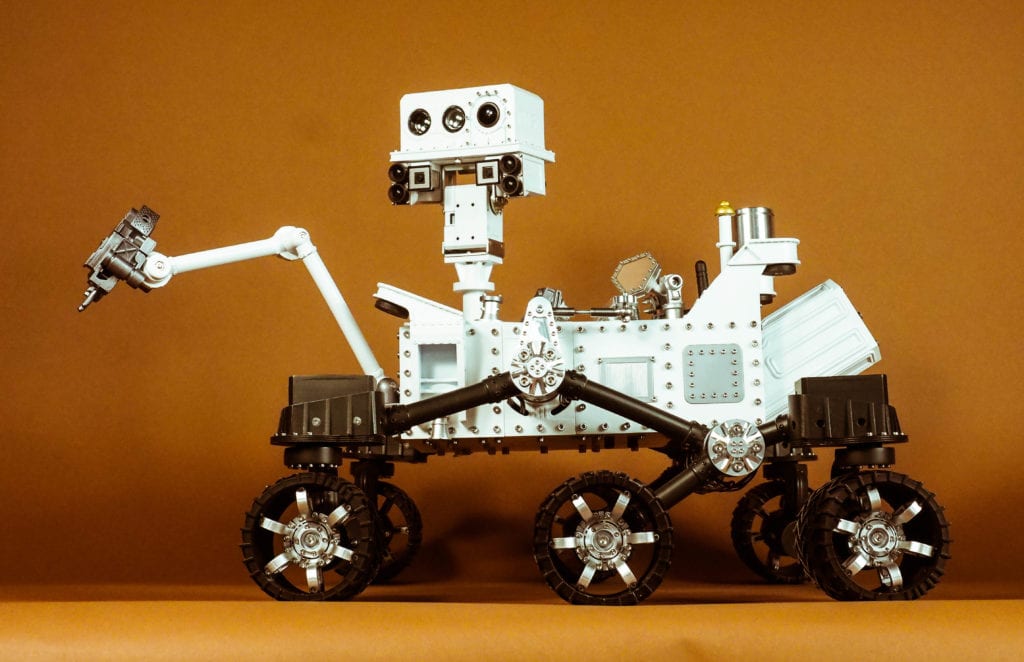
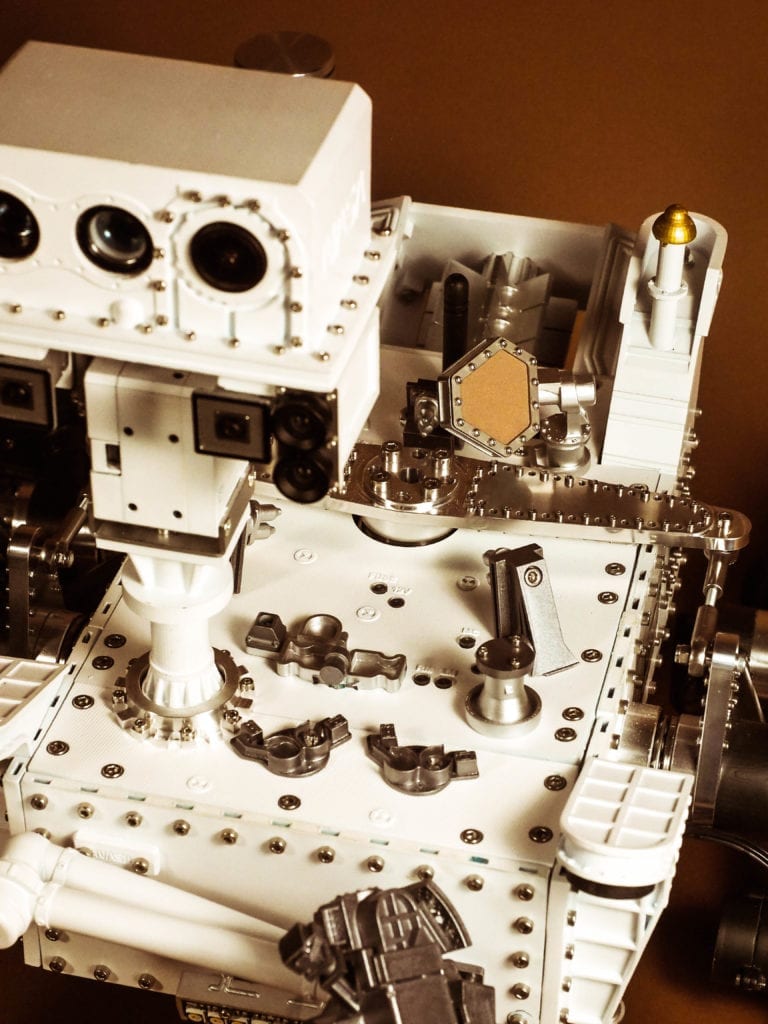
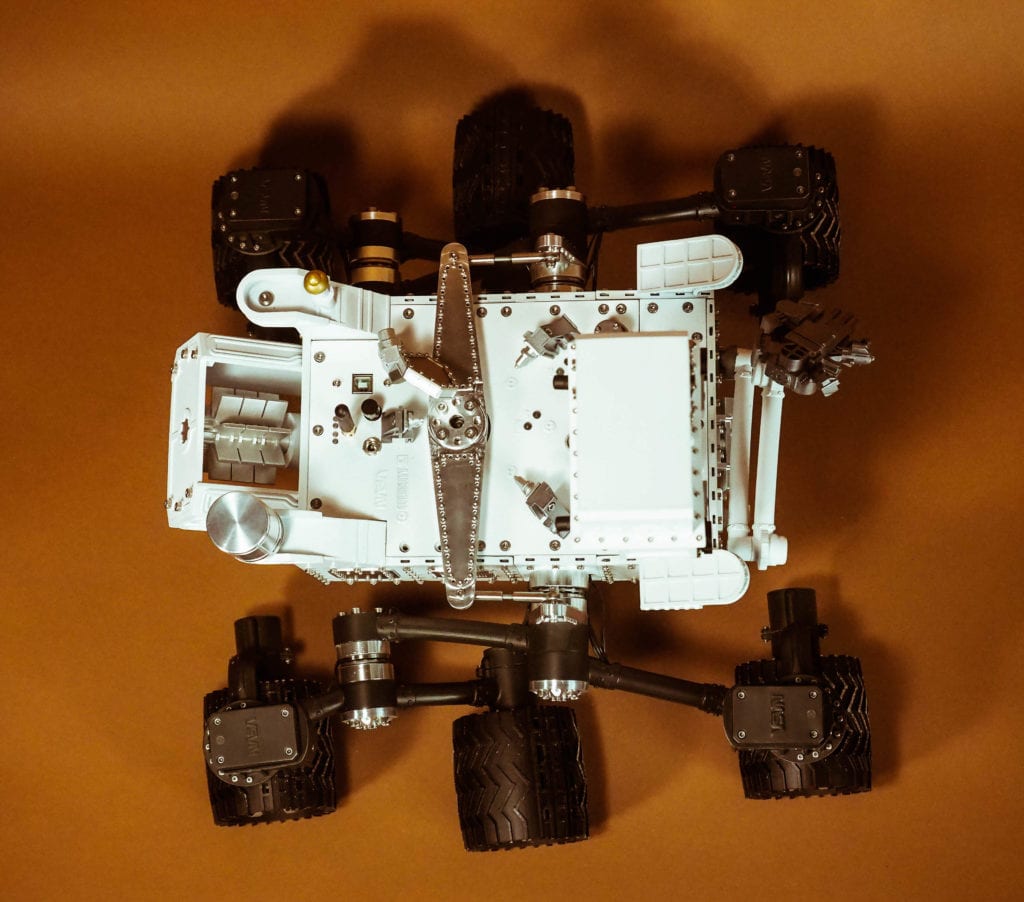
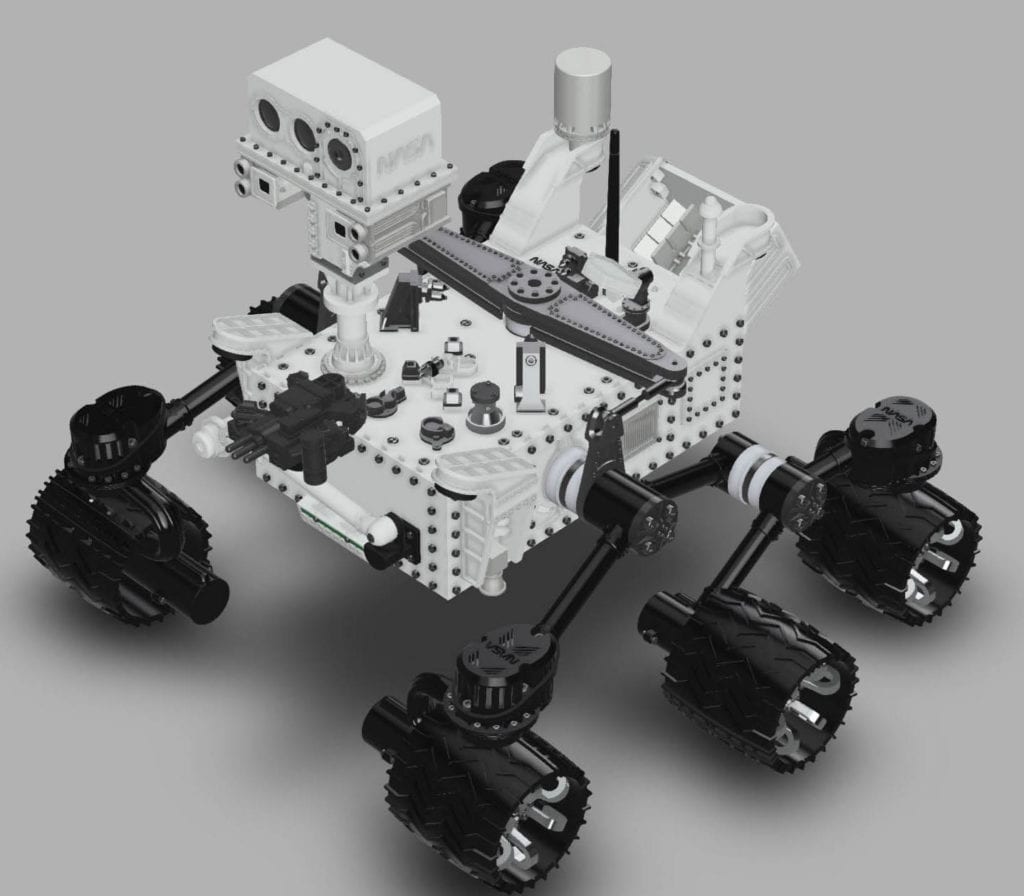
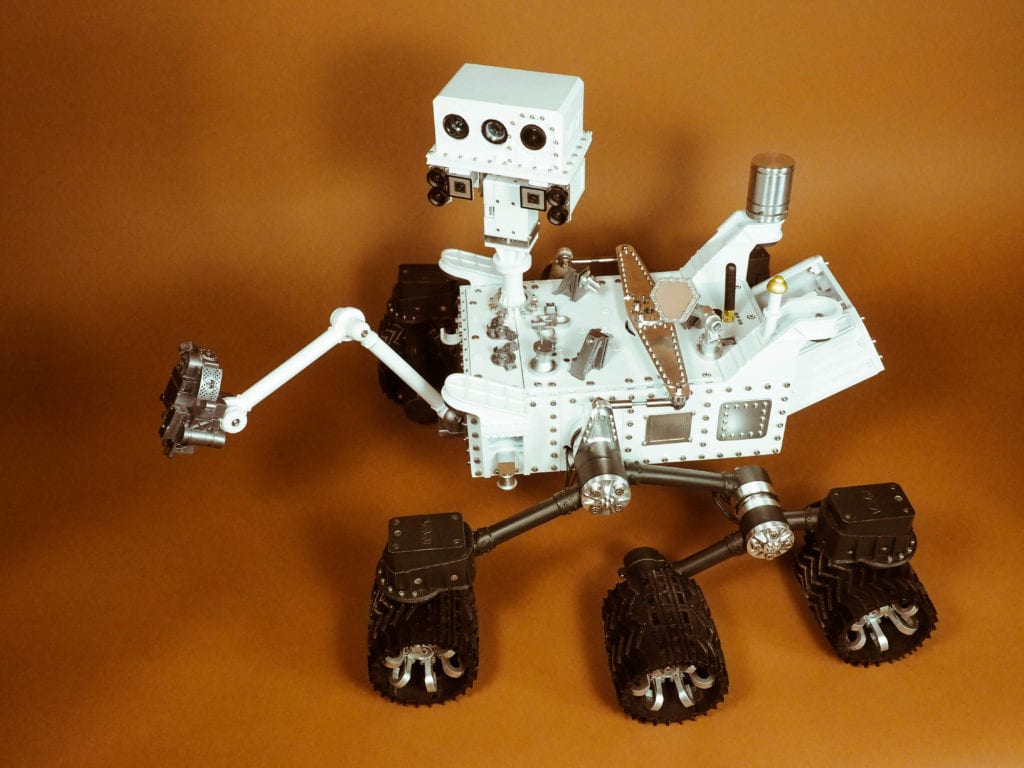
We are excited to share our latest and most ambitious robot, the Curiosity Mars Rover. This is a highly-interactive, 1/10th scale functional replica of the NASA Curiosity Mars Rover. This project was ambitious for us in two main ways: First, we worked very hard to make the robot visually accurate to the original NASA rover. This necessitated custom designing and manufacturing nearly every visible component on the robot. One of the key challenges was to get the required level of detail and functionality into such a small scale robot. Second, we encapsulated all the features and capabilities we wanted for this robot into a robust, maintainable, and modular electronics package based on a stack of custom Printed Circuit Boards (PCB) that we designed. This post focuses on the external view of the robot while future posts will focus on the electronics and functionality.
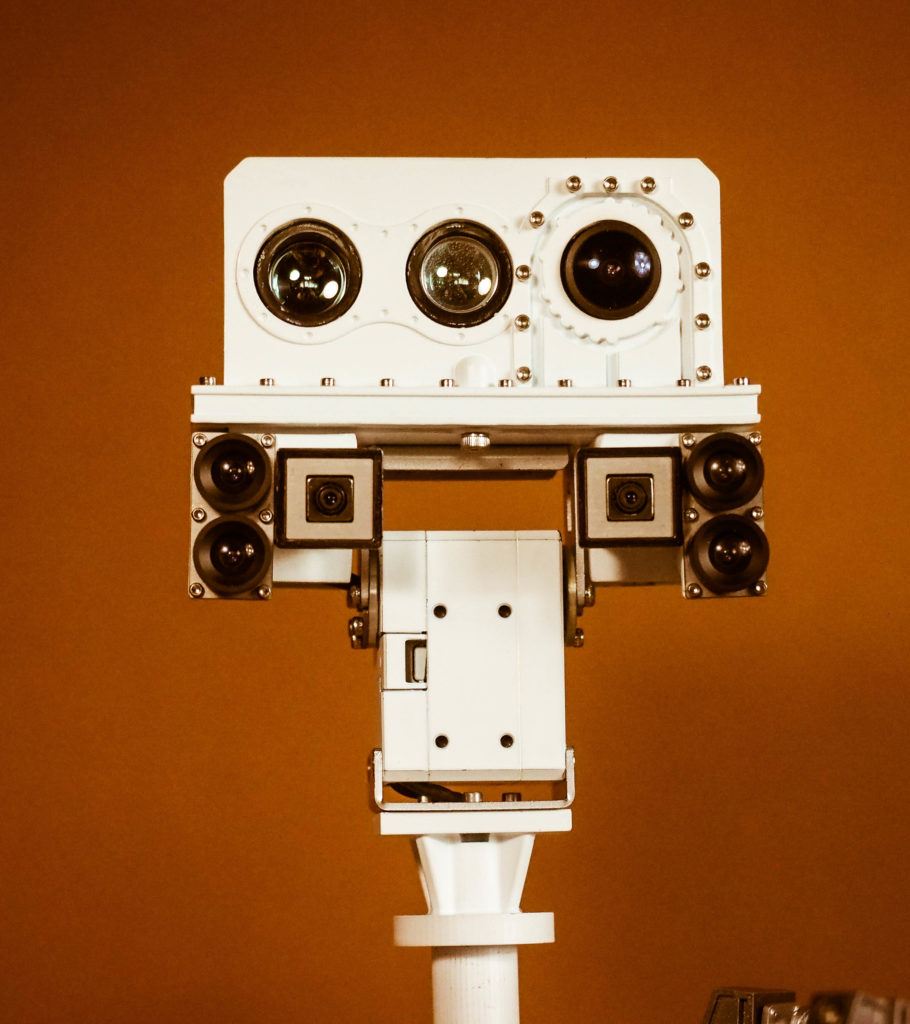
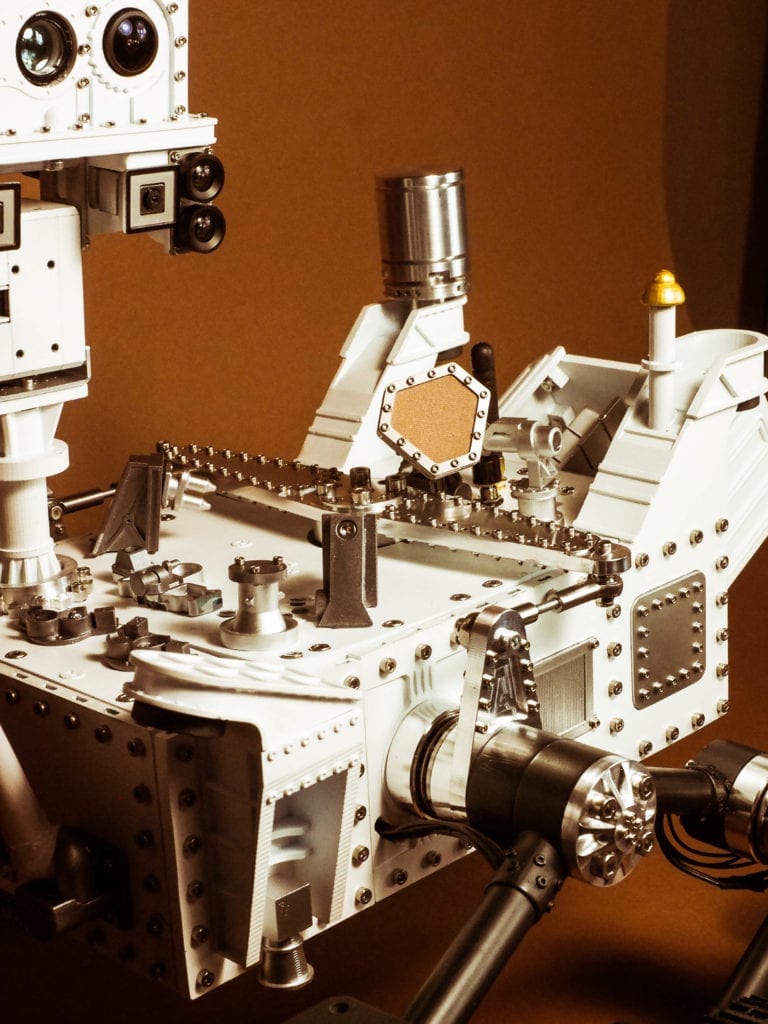
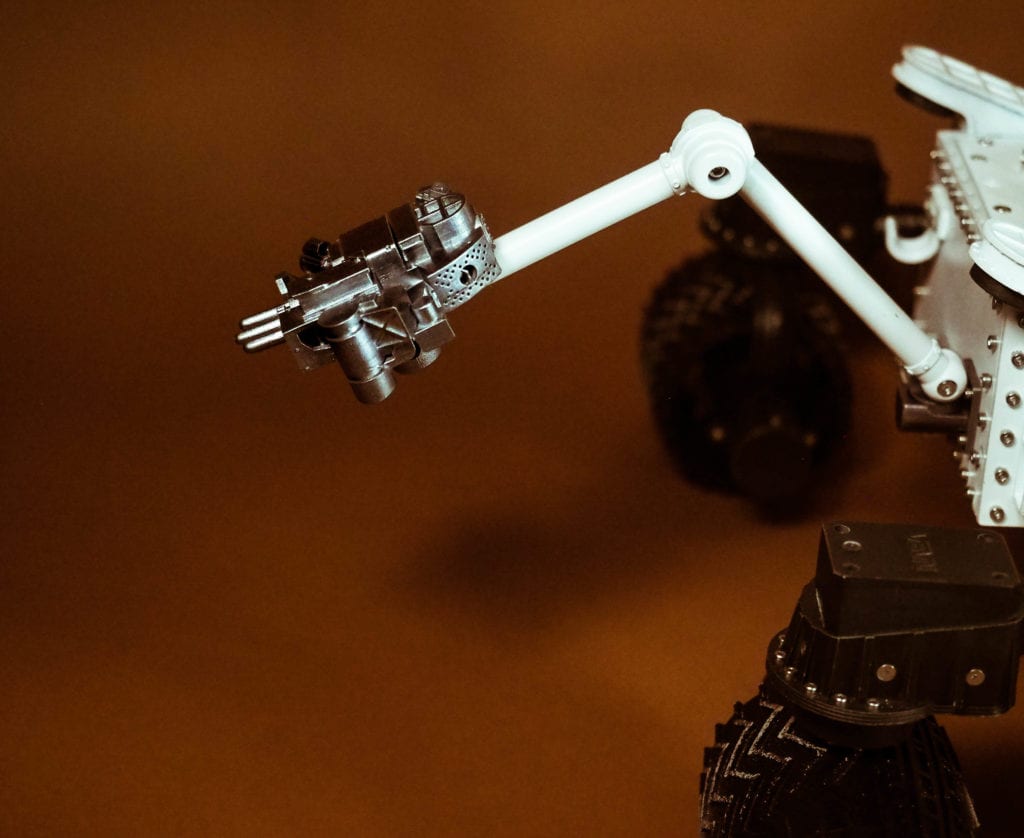
Our Curiosity Mars Rover includes a Six Wheel Drive System (6WD), a fully-functional Rocker-Bogie Suspension System (RBSS), servo steering, a functional differential bar, a 360-degree camera/sensor turret, 3D LIDAR sensing, autonomous behavior, radio data transmission, and much more—all as per the real Curiosity. The rover is approximately 17” long x 20” wide x12” high.
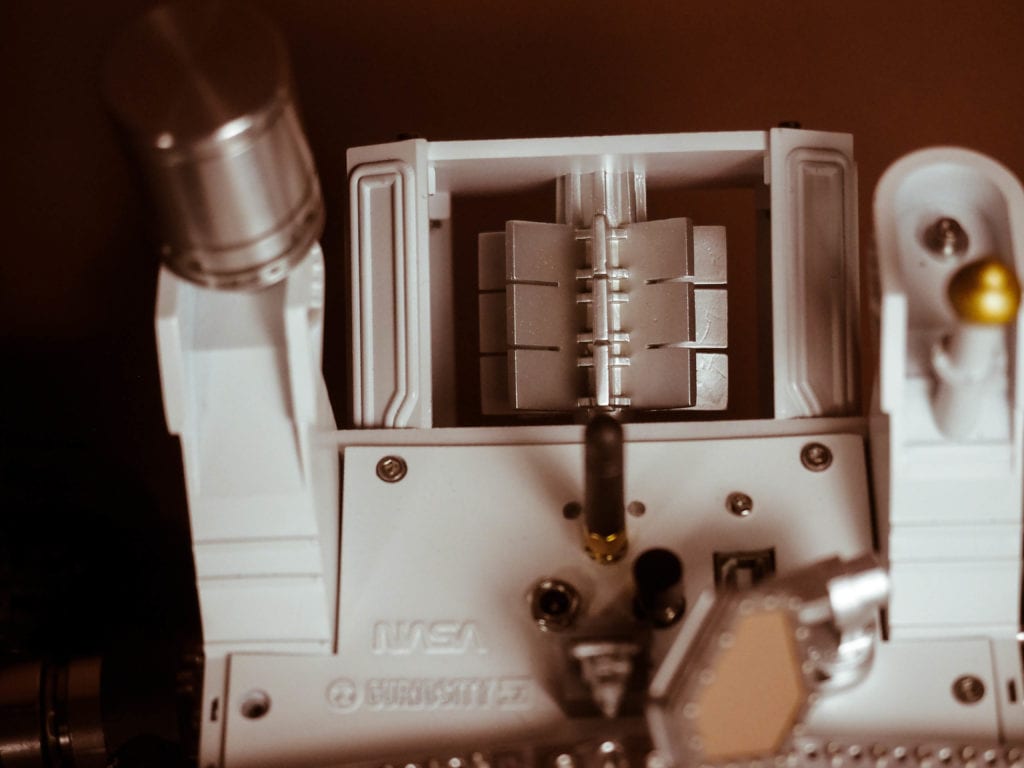
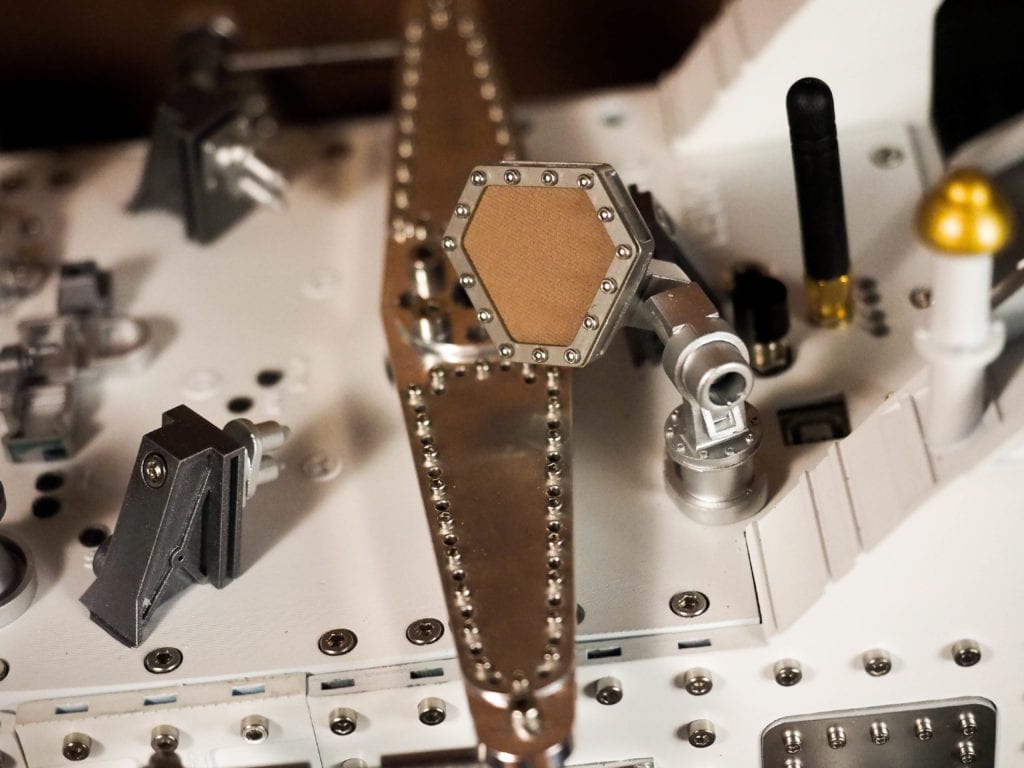
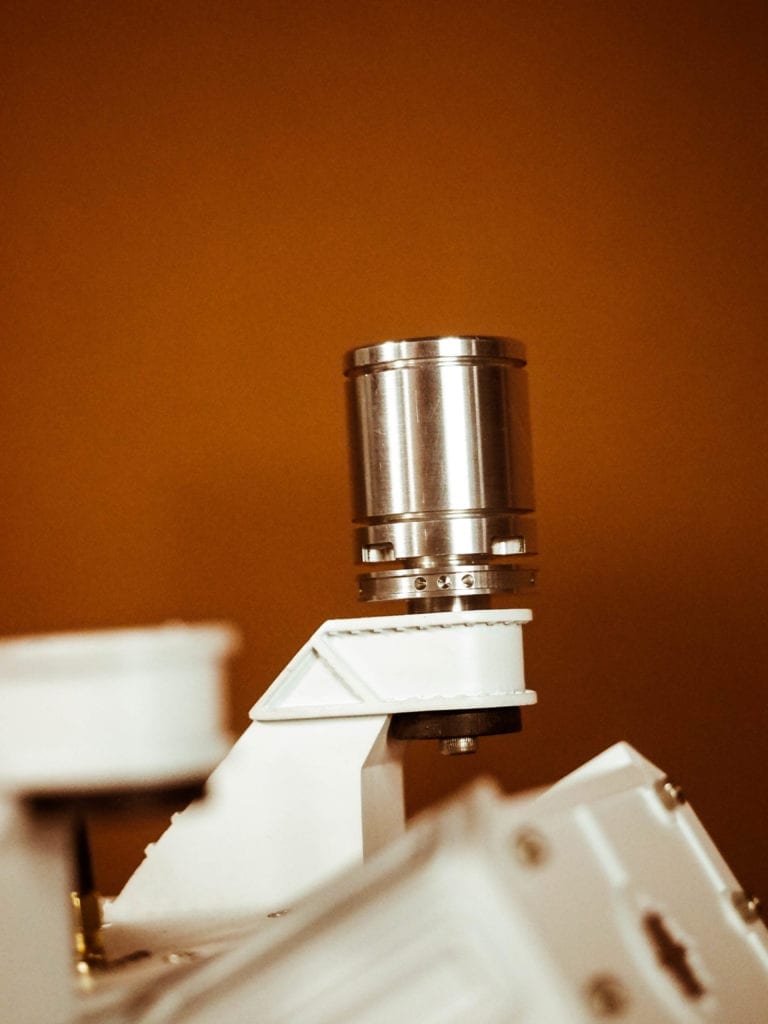
To achieve the visual appearance we wanted, we carefully studied all the NASA photographs and drawings we could find, designed each component using the Fusion 360 CAD software (special thanks to our friend Dan Kreisher!), and then manufactured the custom parts one by one, including all of the body components, chassis struts, wheels, hubs, turret, top deck details, side details, and all the other visible components. All of the white parts, the struts, the servo covers, the wheels, and many other parts were printed in-house on our Formlabs SLA 3D printer out of engineering resin, then carefully sanded and painted (special thanks to Jennifer Beatty and Mike Dutra for helping out in this critical area!). The metal parts were machined out of 6061 Aluminum on our in-house Tormach CNC Mill and/or by our friend John Saunders. Several of the small stainless steel parts (around the camera lenses on the masthead) were laser cut for us by our friends at Pololu.
We’ll provide more details on the electronics and the build in the future, but here is a quick run down of some of our main sources: Pololu: motors, shaft hubs, motor controllers, smart switch, current sensor, and voltage regulators. PCJR: Teensy 3.6 microcontroller. DigiKey: resistors, capacitors, relays, connectors, wires, and all other discrete electronic components. McMaster-Carr: screws, spacers, nuts, raw material, and other fasteners. Robotis: Dynamixel servos. Sparkfun: Xbee radio board, LIDAR, and other electronics. Adafruit: Neopixel and other electronics. Amimon: Connex Prosight HD Video.
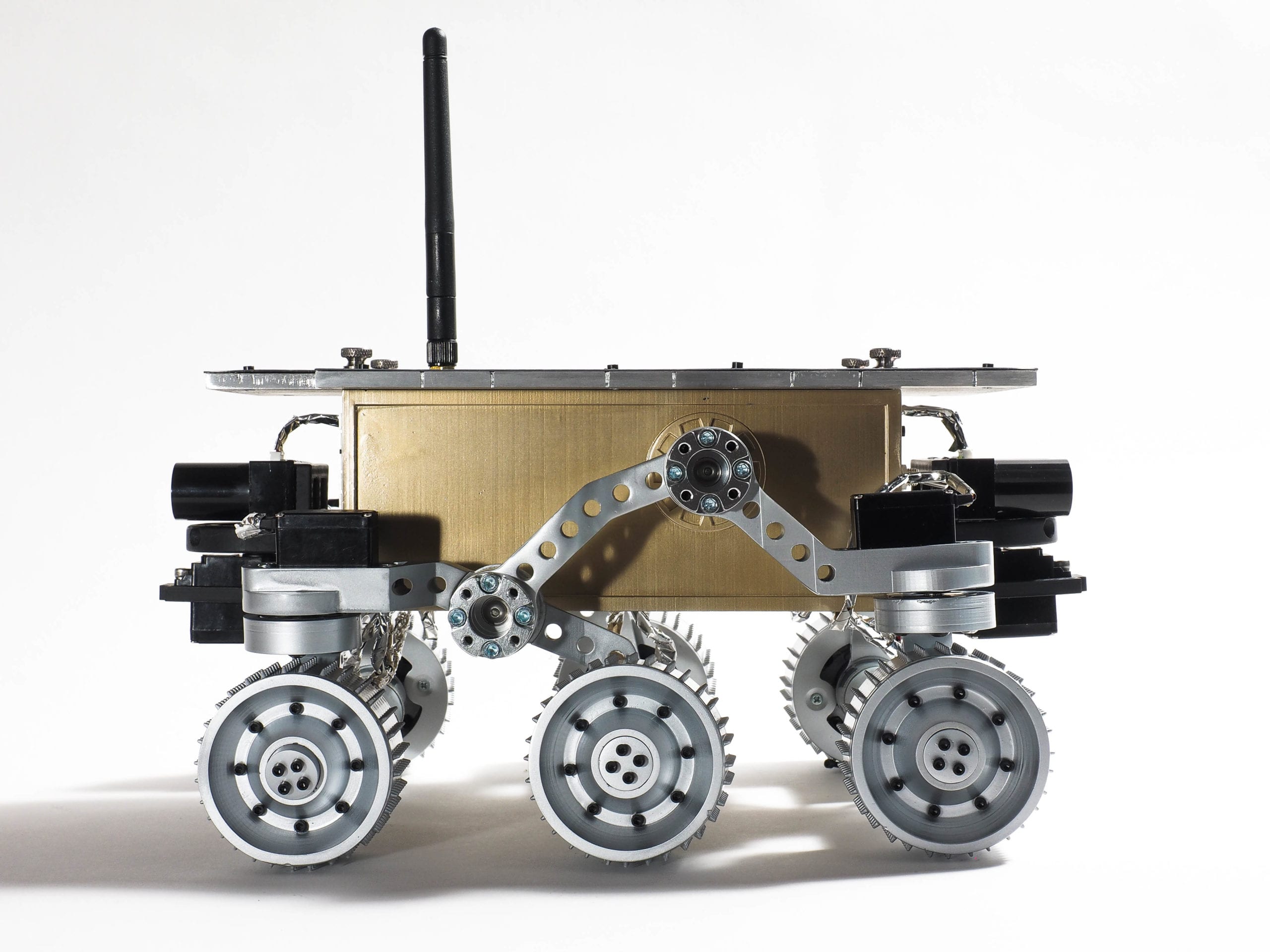
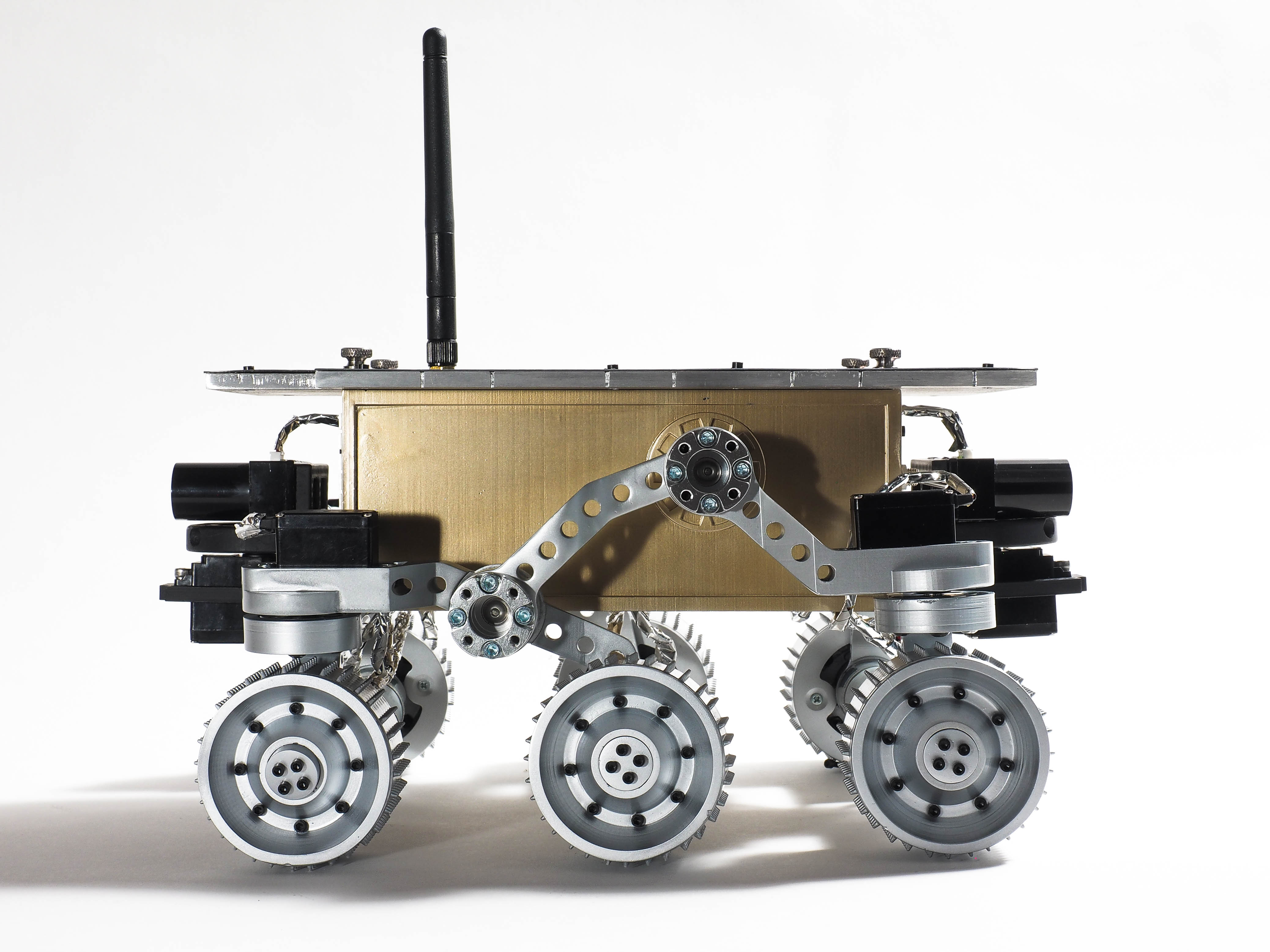
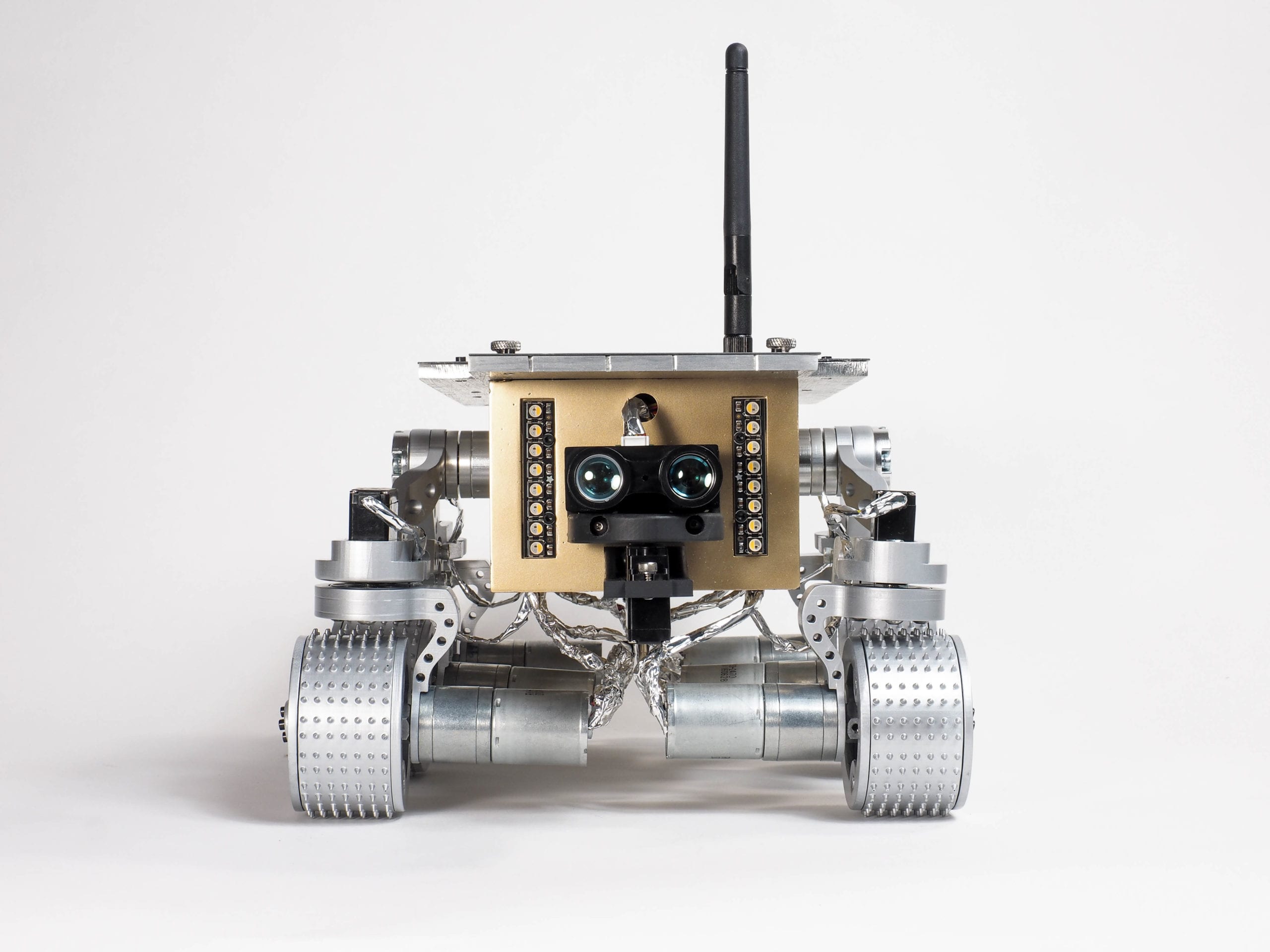
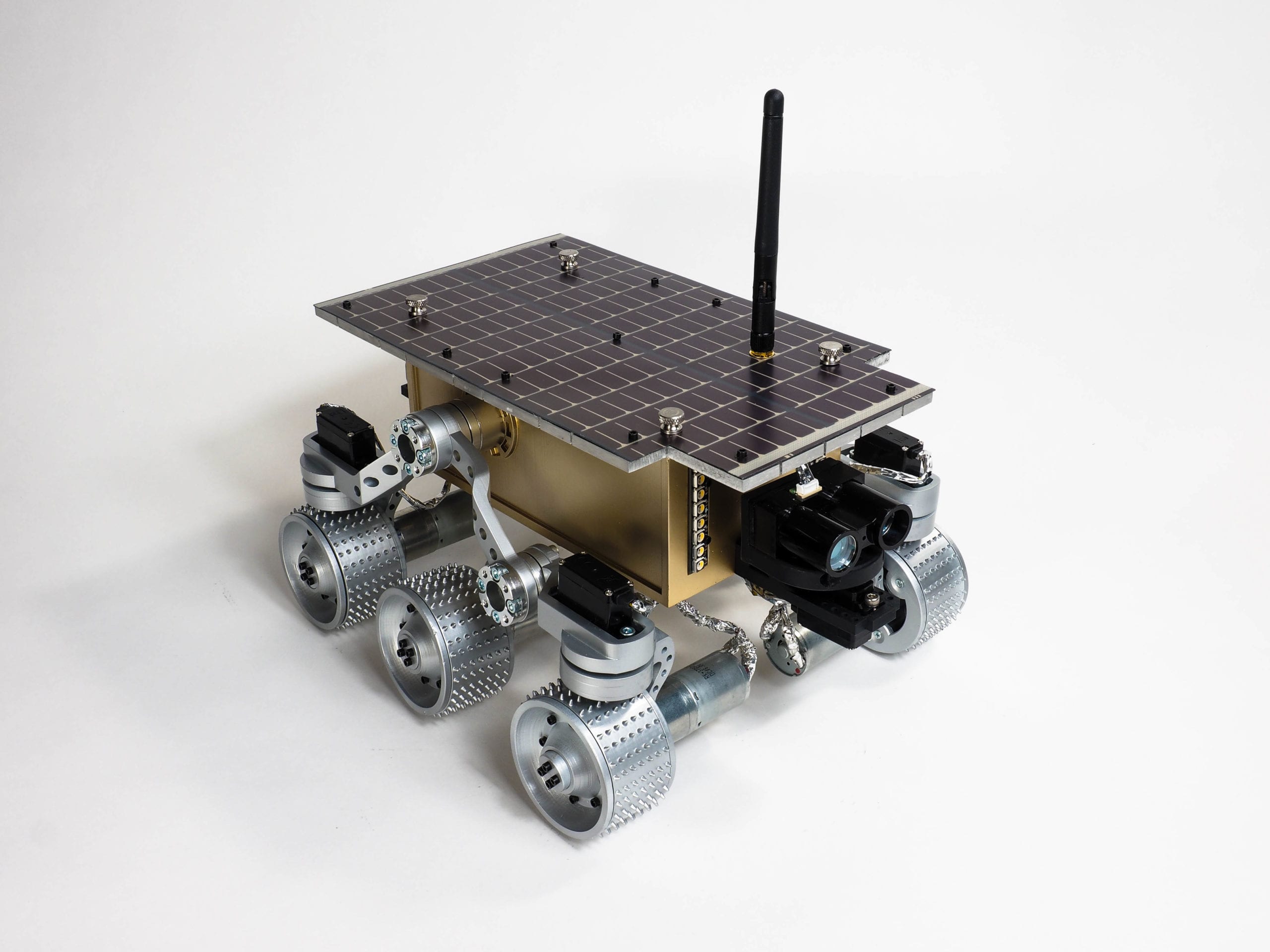
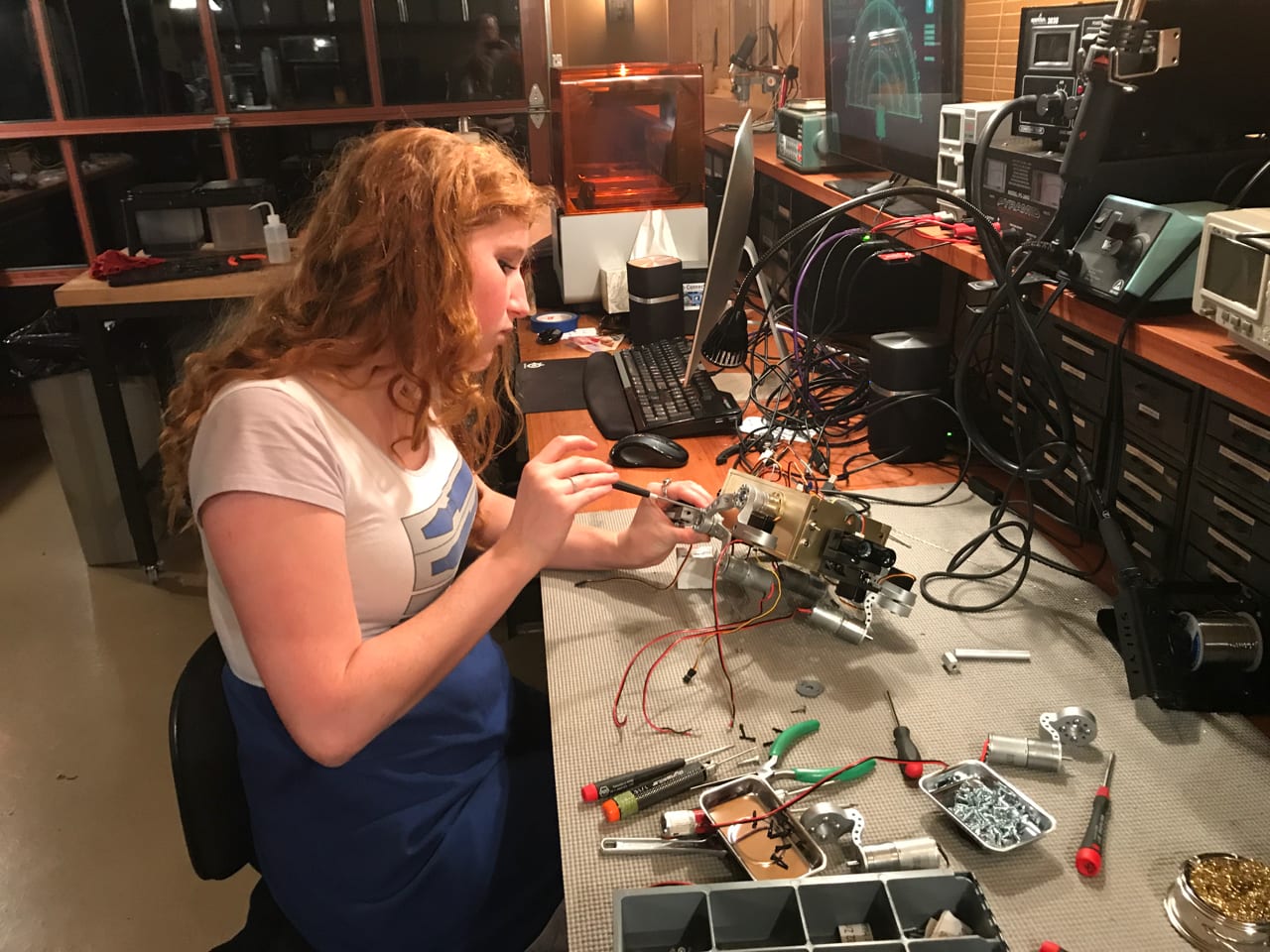
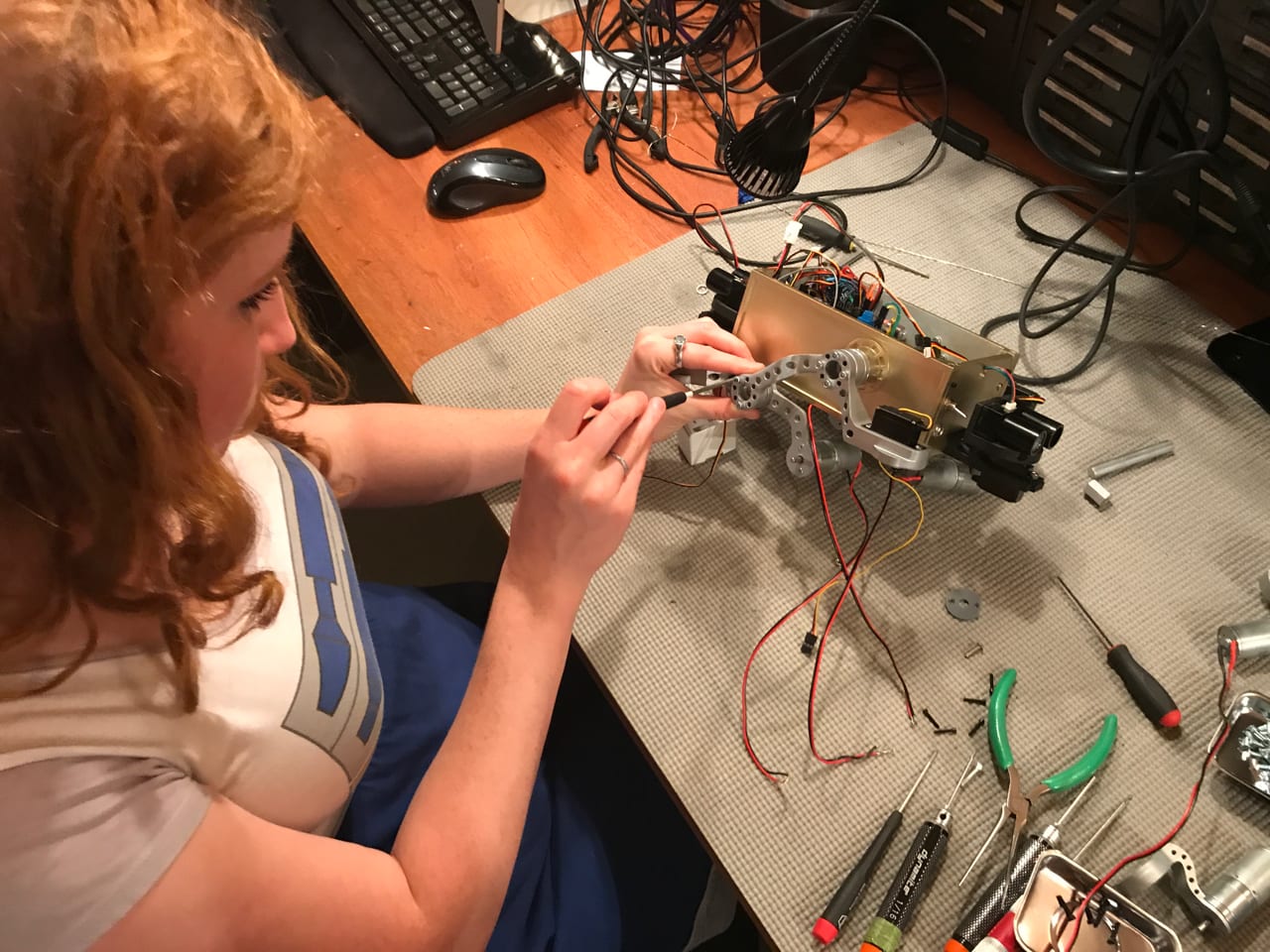
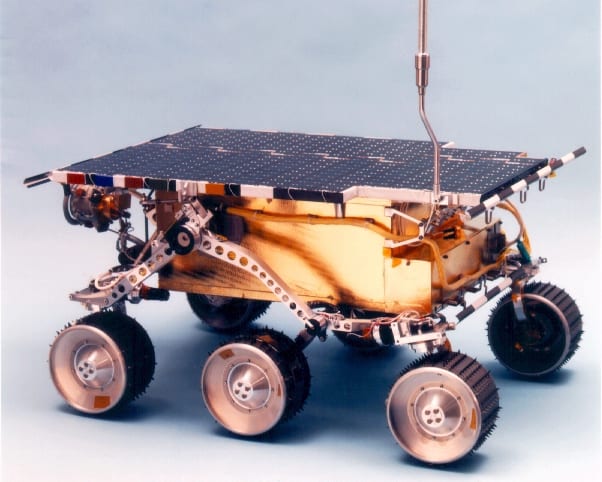
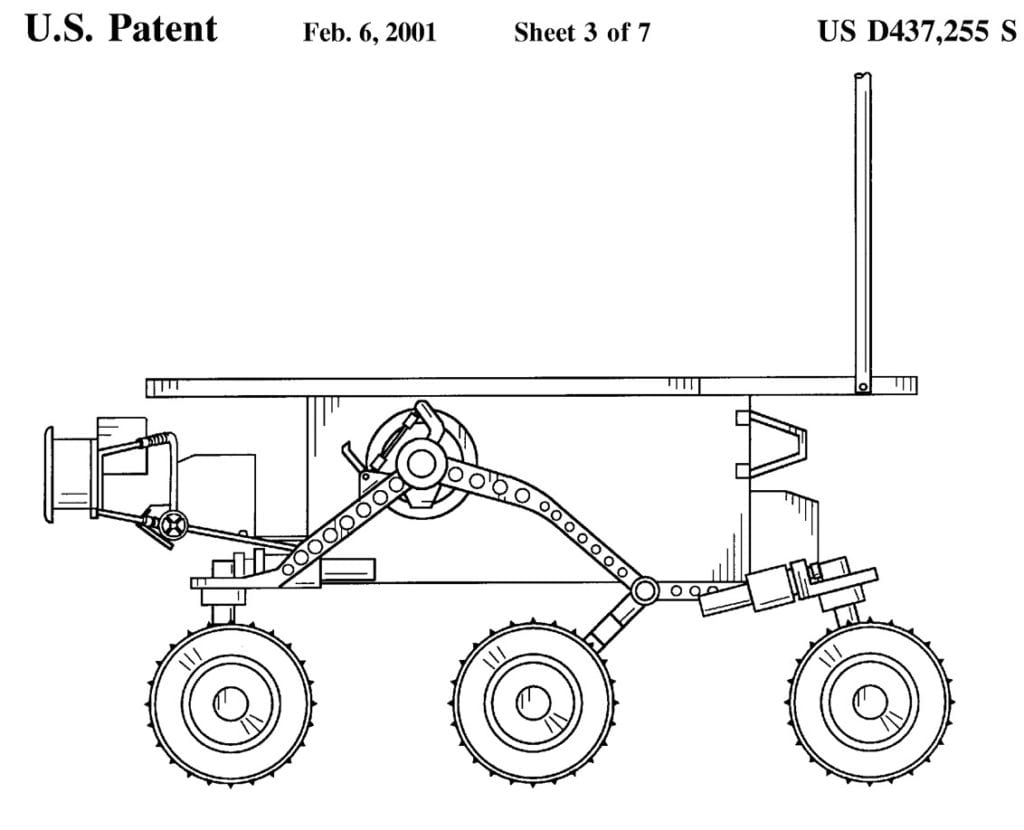
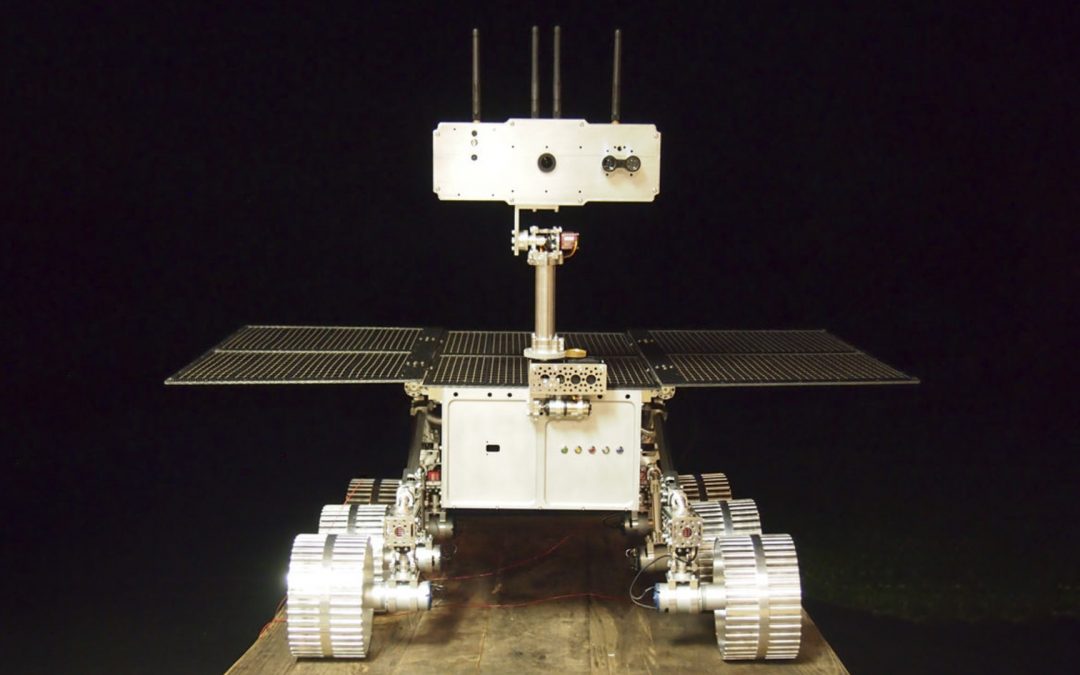
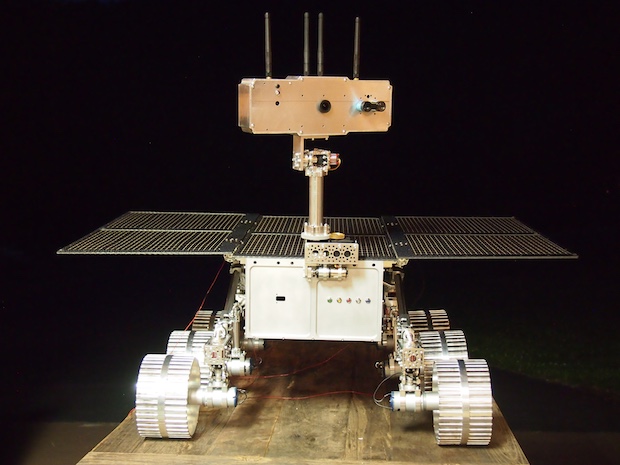
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first robot to operate on an different planet. Like the real Sojourner, our little robot includes six wheels, rotational servo steering, a fully-functional rocker-bogie suspension system, solar panels, a large main antenna, lithium battery, a “warm box” to protect its electronics, a video camera, and a host of other components. We built our Sojourner in 1/2 scale because it is intended to be used in interactive exhibits in space museums where space is limited. Here are some photos of the robot, followed by work-in-process photos from the workshop, our CAD models, and two images of the real Sojourner for comparison purposes.
We worked hard on the inside of the robot as well. It contains a new thing we’ve put together that we call “The Core”. The Core is a stack of integrated electronics that includes an Arduino Zero, a Servo Shield for controlling the robot’s 8 servos, a custom shield we’ve developed, and a high-powered Motor Controller. We think it’s interesting that the real Sojourner used an 8-bit microcontroller that ran at 2 MHz. Our Sojourner robot uses a 32-bit Cortex M0+ processor running at 48 MHz. In other words, our Sojourner is far more powerful than the real NASA Sojourner. That’s crazy! A lot has happened since 1997!
You may notice that Sojourner is equipped with a servo-mounted laser range finder (LIDAR) on the front and back. As the servo sweeps through 180 degrees, the LIDAR unit shoots out a laser to determine the distance to the nearest object at each degree. This is used for obstacle avoidance and autonomous navigation. Sojourner is also equipped with an HD camera that streams FPV video back to video goggles and/or computer monitor.
Sojourner is equipped with an Xbee radio for transmitting to and receiving from a computer control station. Sojourner is capable of exploring autonomously, or taking a “Command Sequence” (a series of user-programmed movement commands), or real-time manual Remote Control.
This is a small little robot, but it’s become one of our favorites. In future posts, we’ll share some video of Sojourner in operation, a description of the control software, and the details about the new shield we’re working on.
We would like to thank Arduino, Actobotics/ServoCity, Adafruit, Pololu, Ion Motion, and the other companies that provided many of the components. We would like to give special thanks to Dan Kreisher for helping us with the CAD modeling on Fusion 360.
WORK-IN-PROCESS SHOTS
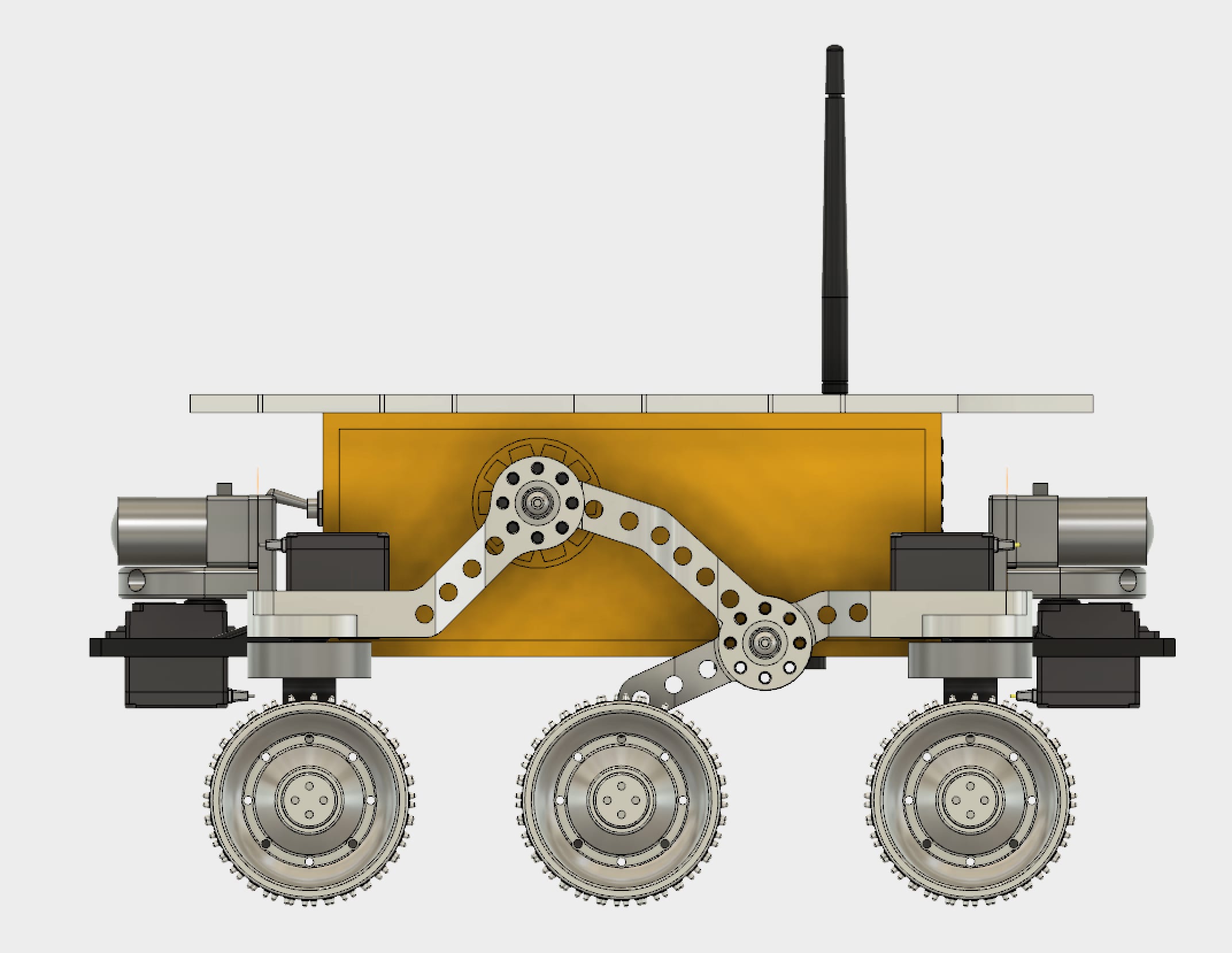
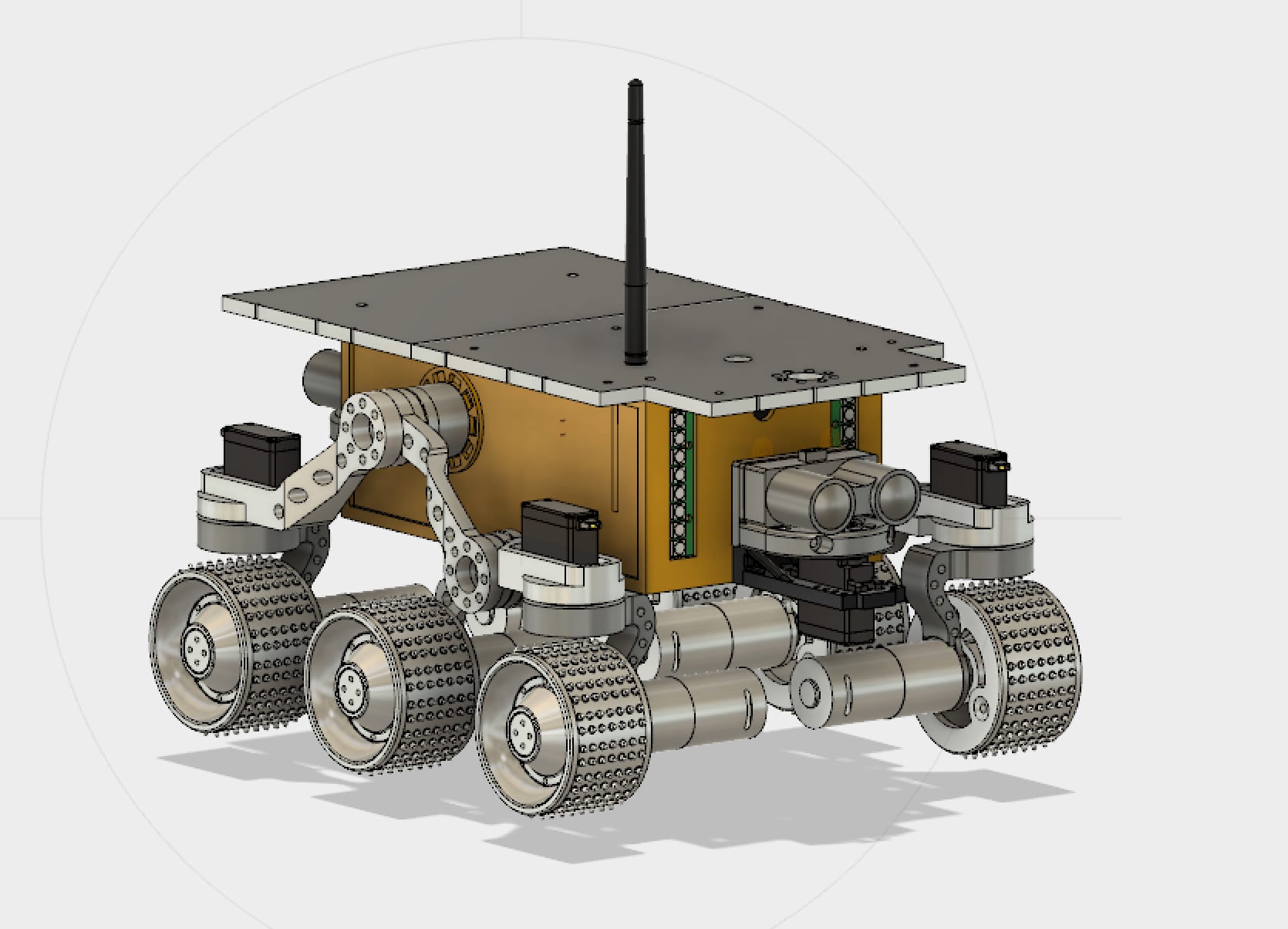
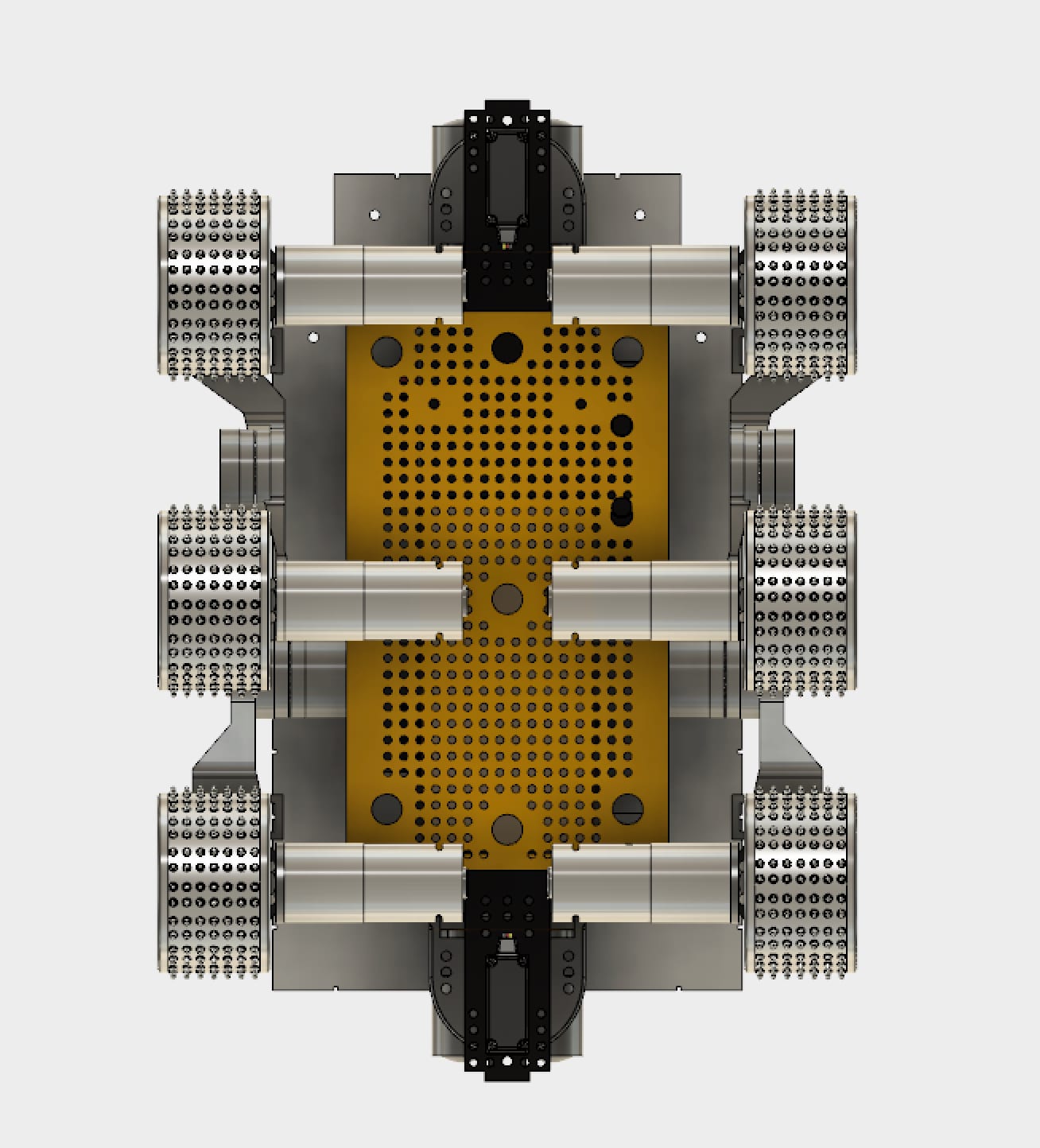
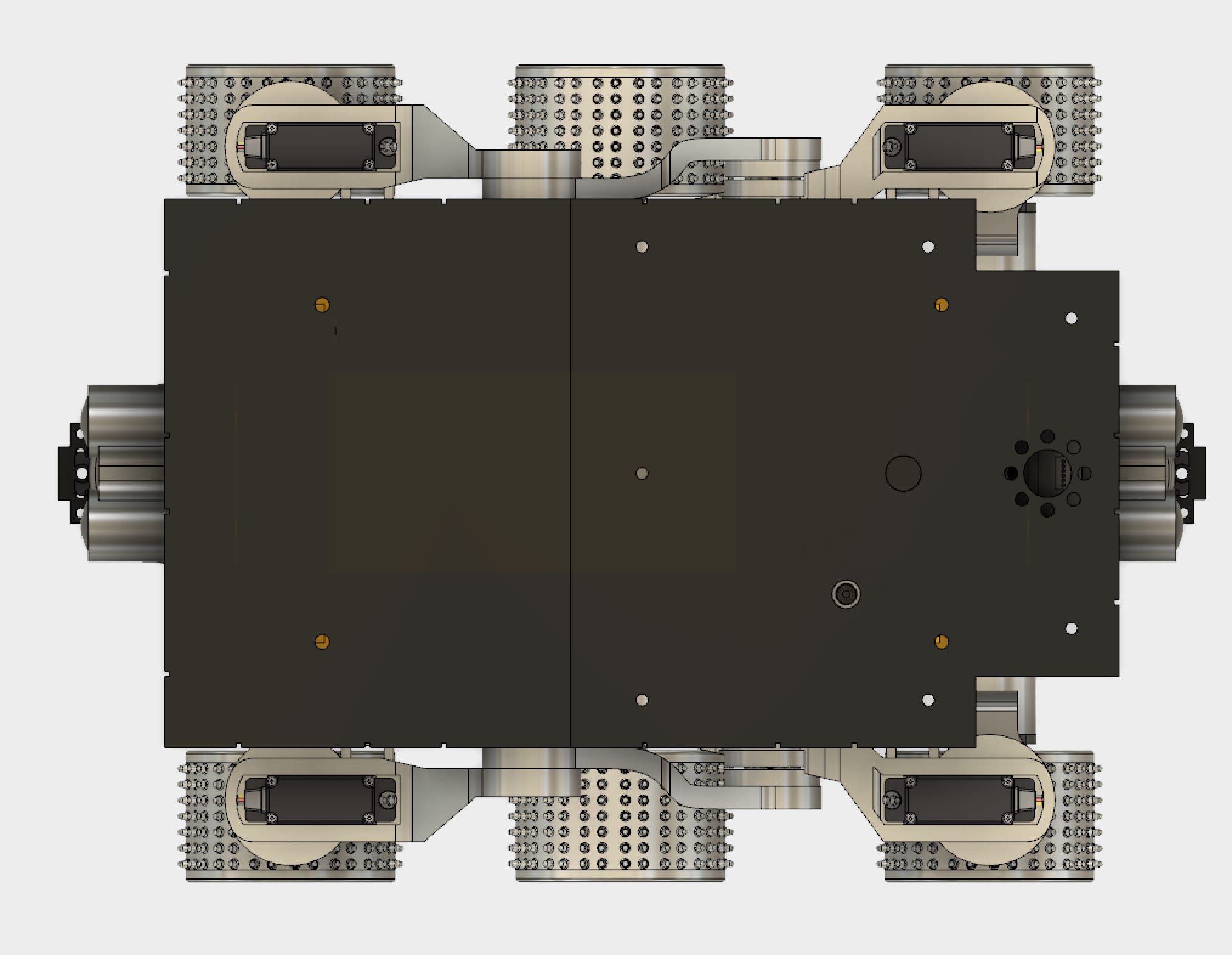
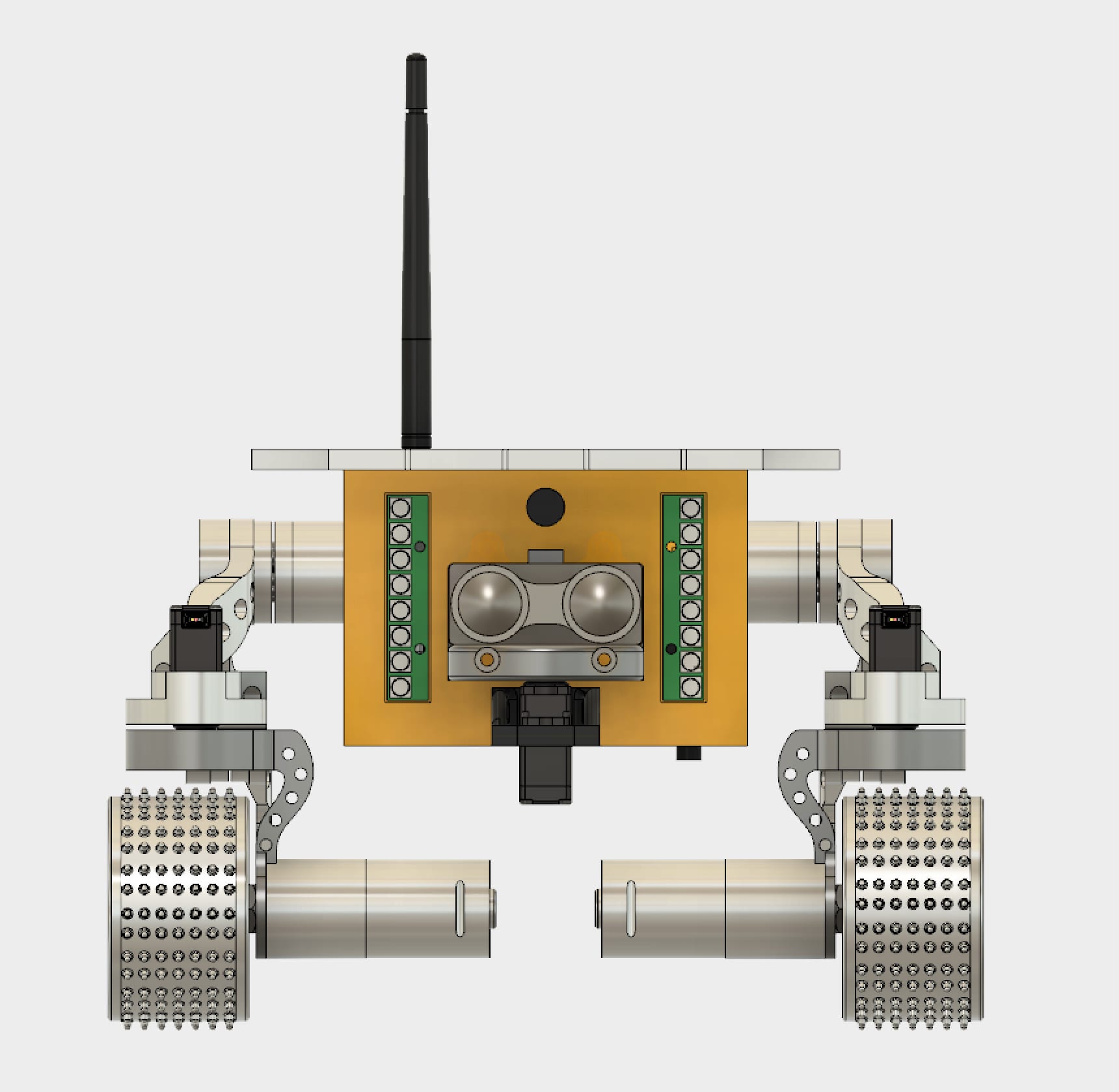
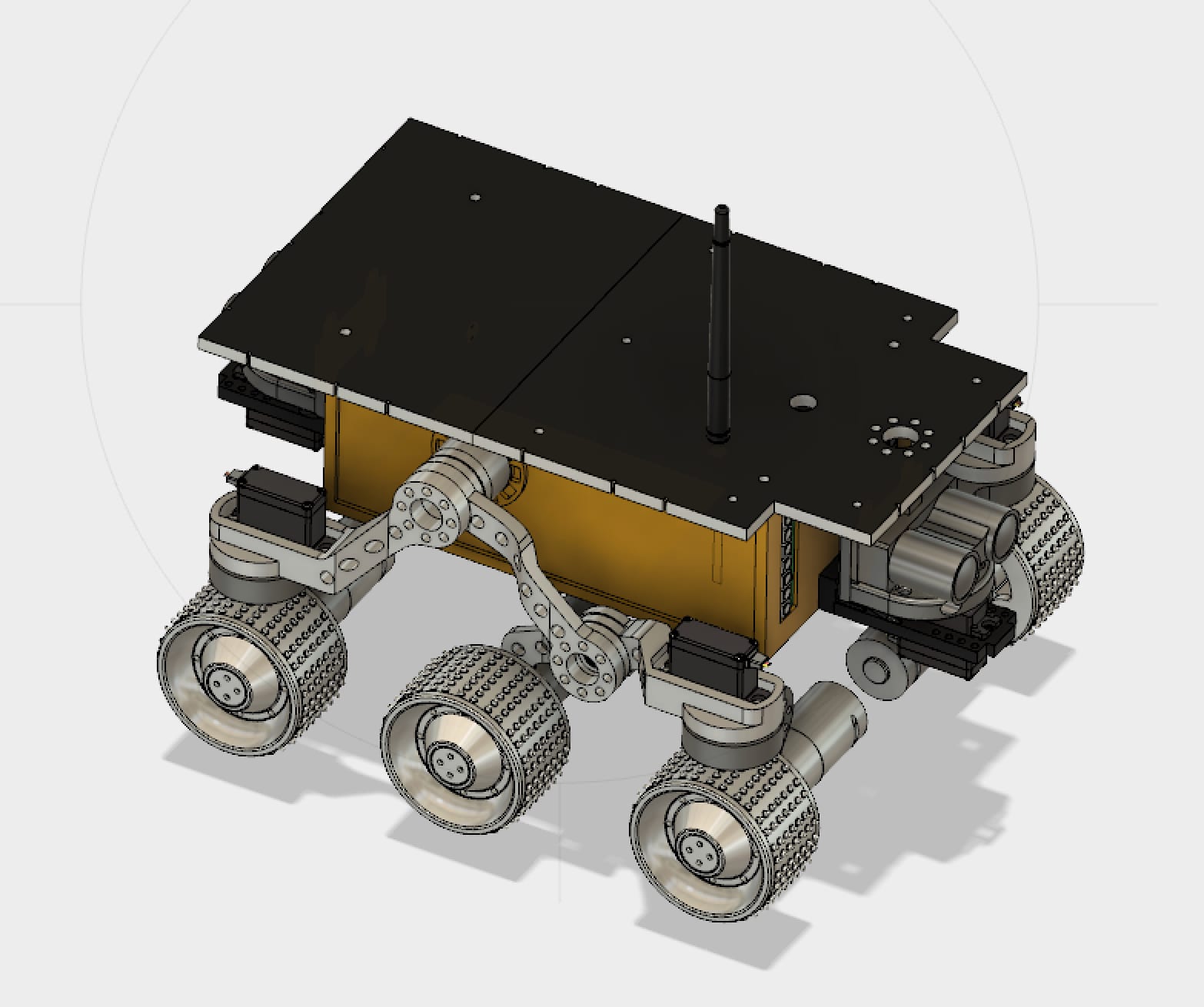
THE BEATTY ROBOTICS 3D CAD MODEL OF SOJOURNER
THE FOLLOWING PHOTOS SHOW THE ACTUAL NASA SOJOURNER ROVER
(Please note that the robot’s tread’s look blackish in this photo, but in reality the machined aluminum wheels had sheet-metal teeth, not rubber. Rubber would freeze and shatter on Mars)
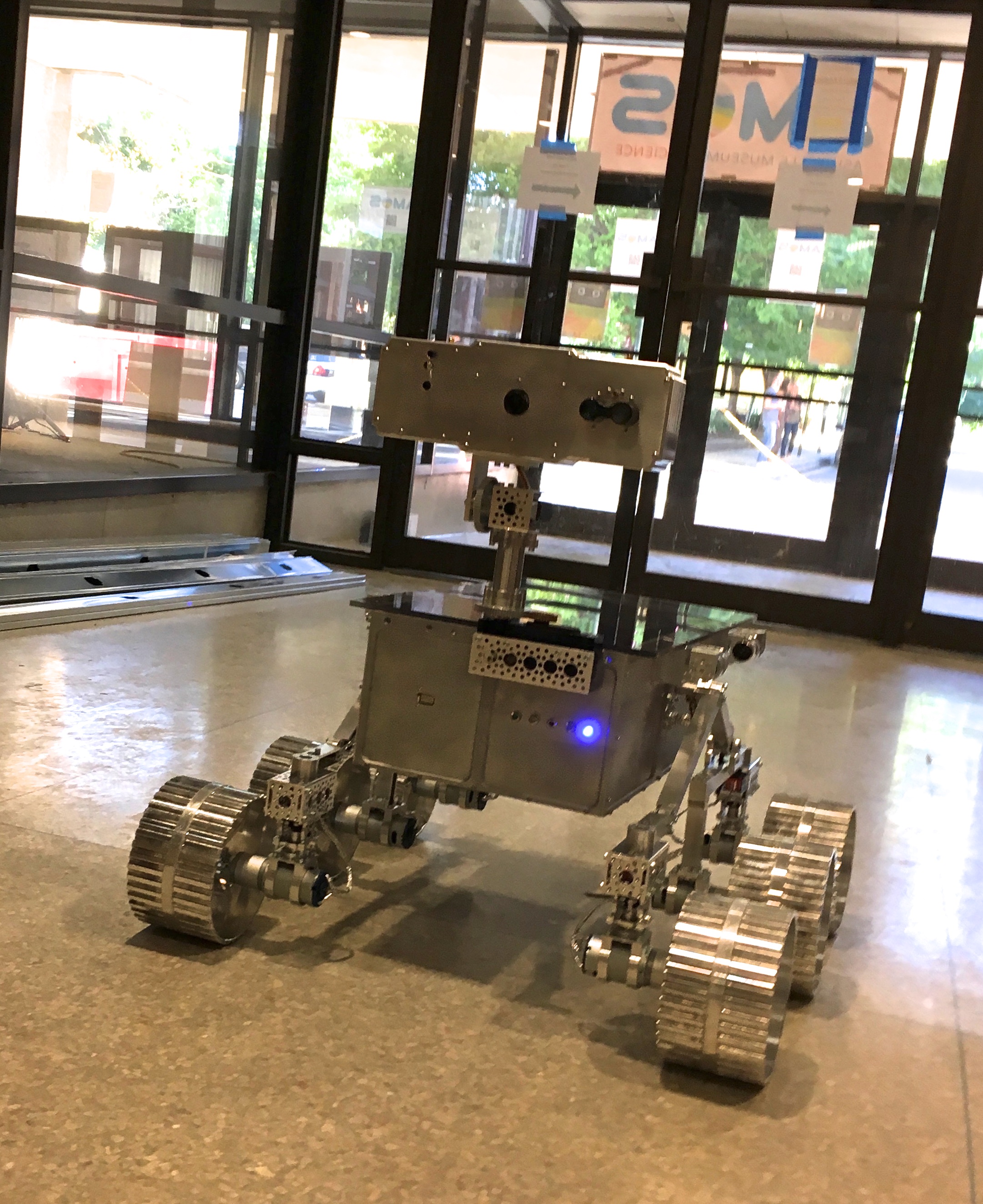
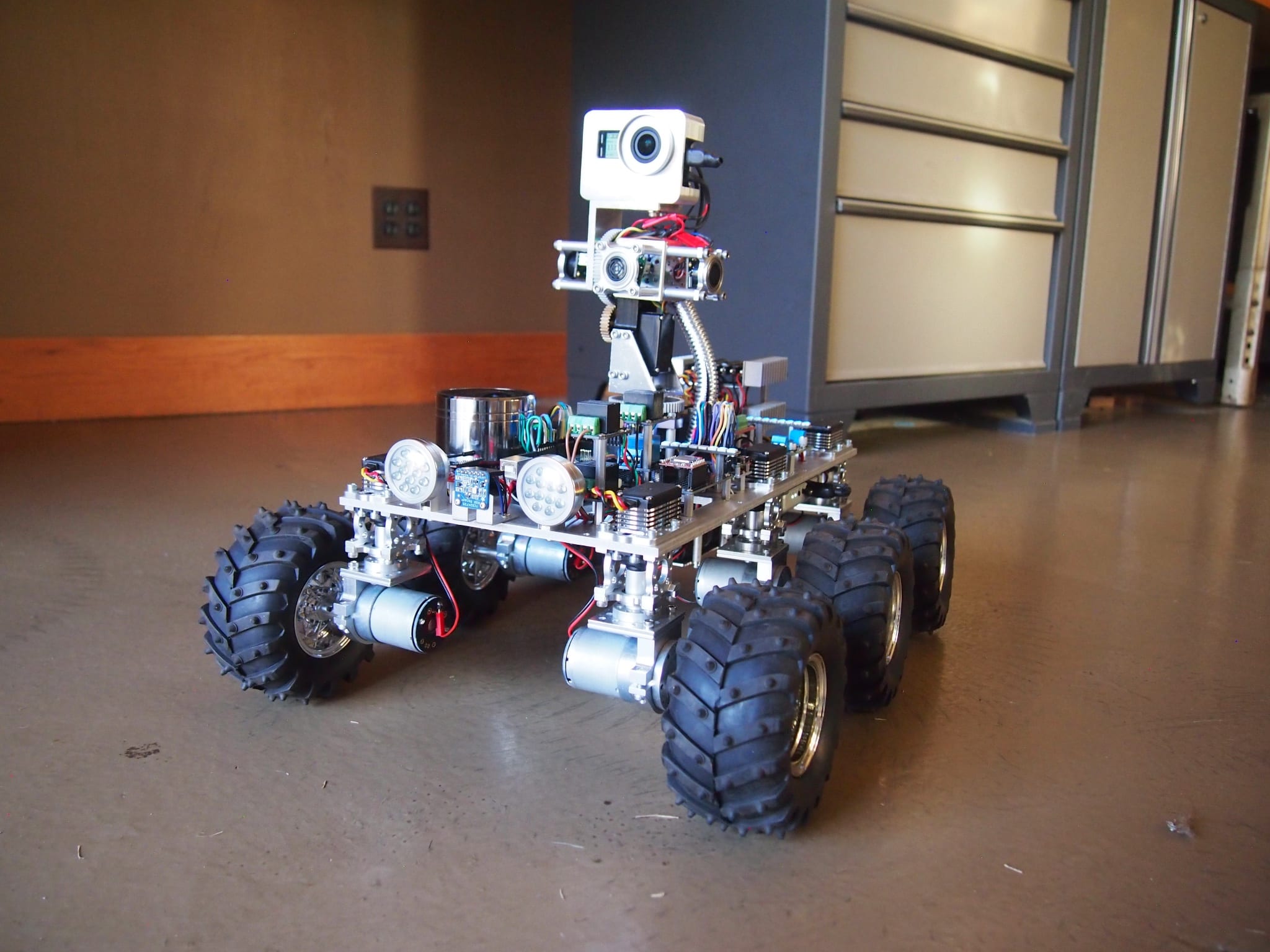
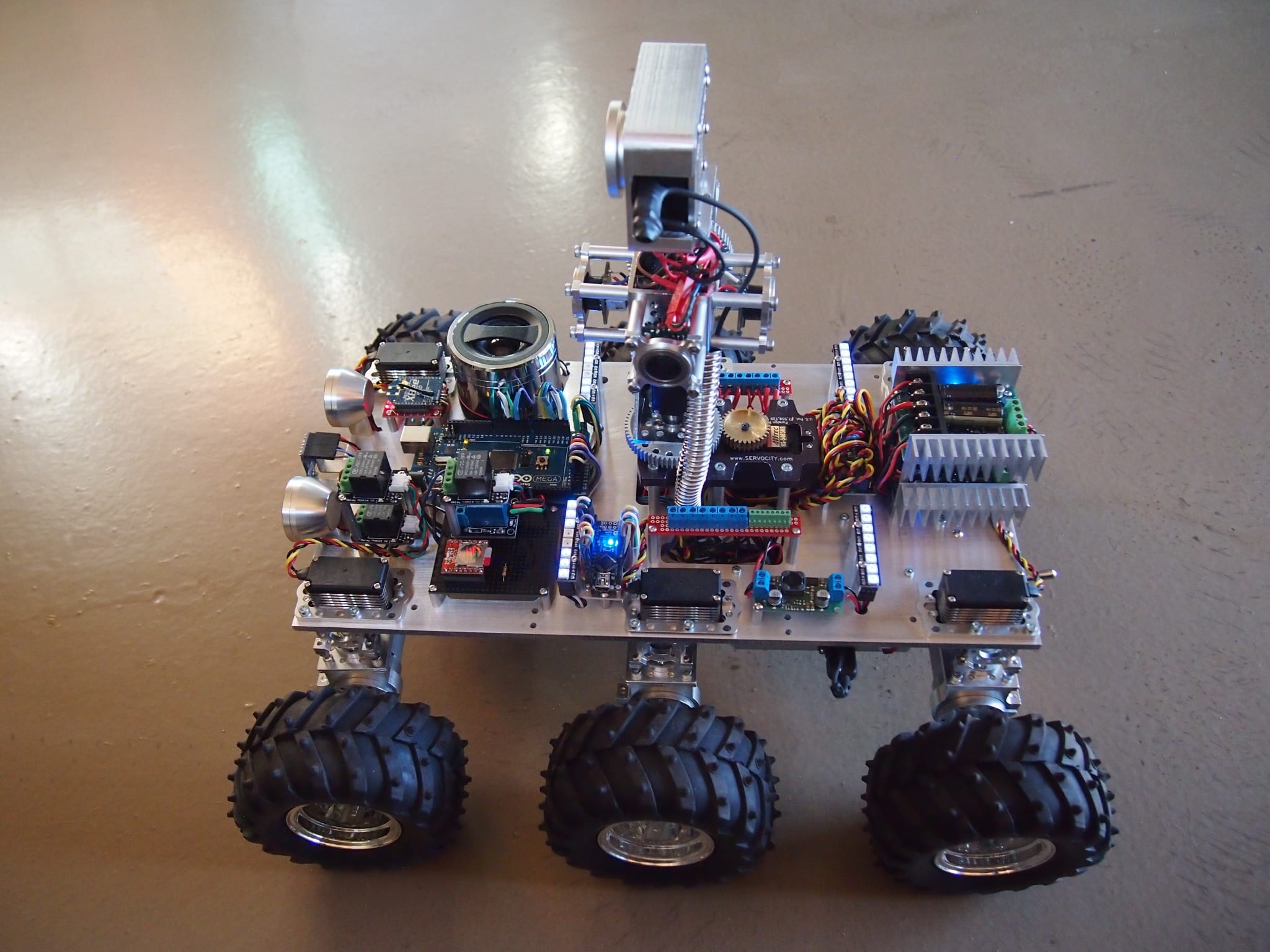
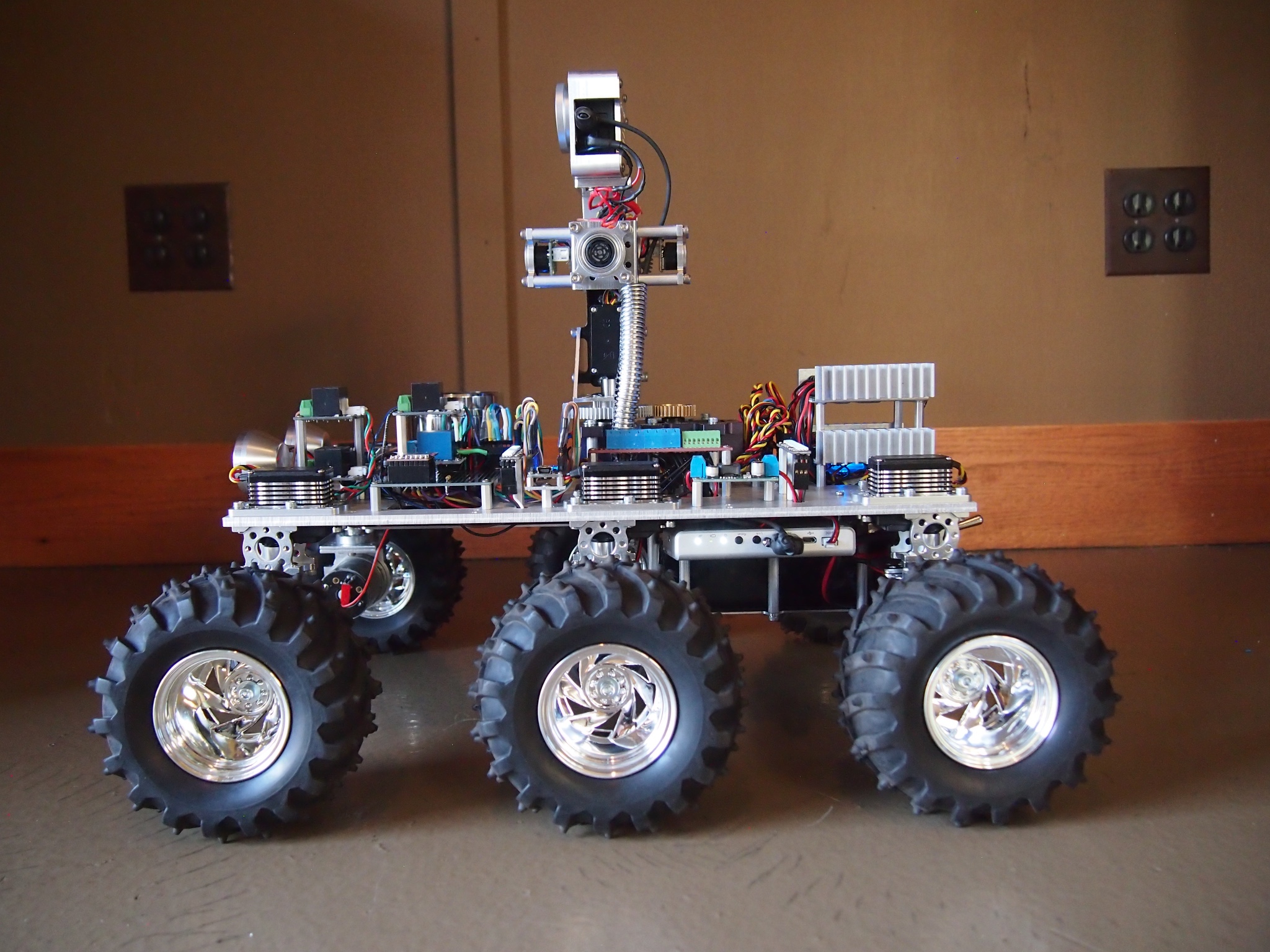
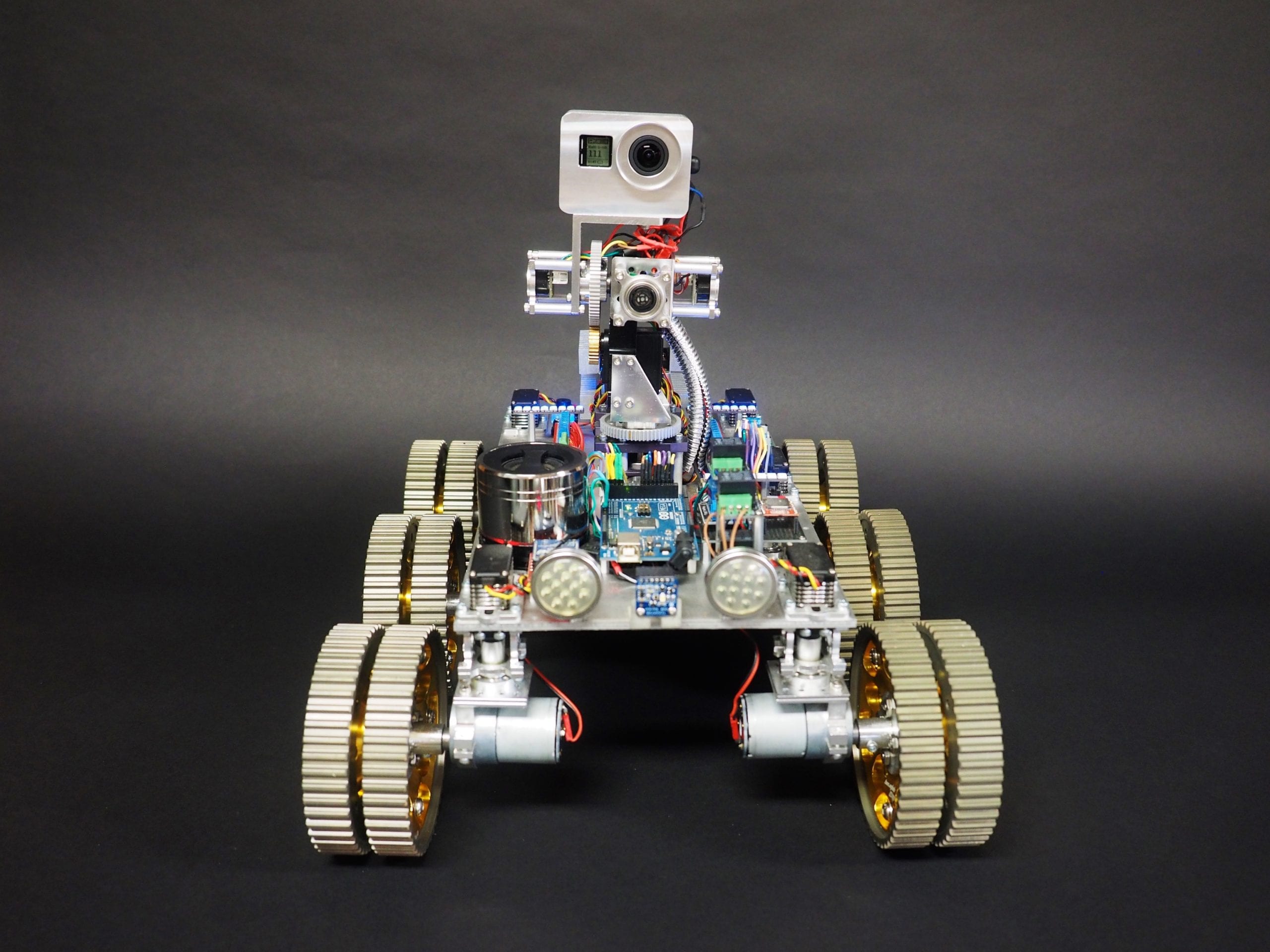
We have built a sturdy but compact 6-wheel-drive (6WD) rover for museum exhibits with limited space. In this video, we are testing its various steering methods (strafing, rotation, 2WS, differential, etc.). The main plate of this robot is a custom part that we machined. The servos, motors, motor mounts, servo blocks, camera turret, and many of the other components are from Actobotics. The brain of the robot is an Arduino Mega. It is also equipped with on-board sound/speaker, four Maxbotix obstacle sensors, a color sensor (at the front), and Neopixel RGB LED light strips. The turret holds a Hero 4 GoPro camera (in a custom case we machined), which transmits live HD video over a Connex video transmitter to a First-Person-View (FPV) Headset. The 7.4V LIPO battery is mounted under the main plate. The Remote Control (which is an Arduino-based device we created) communicates with the robot via xbee radios. We have designed this robot to support rubber tread wheels and metal wheels
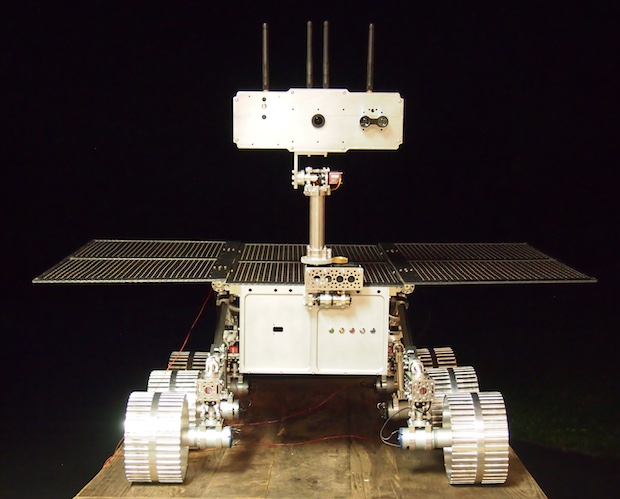
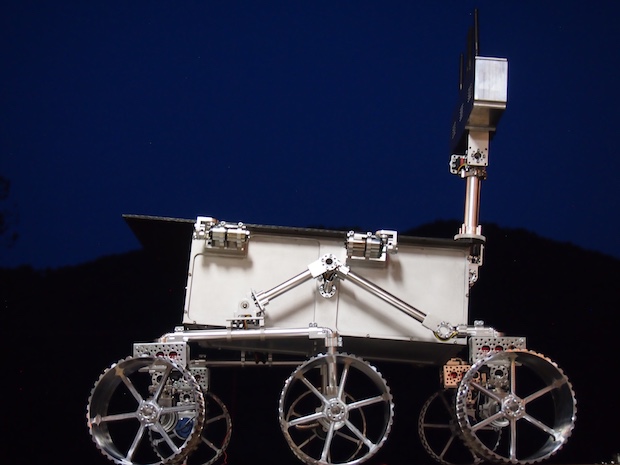
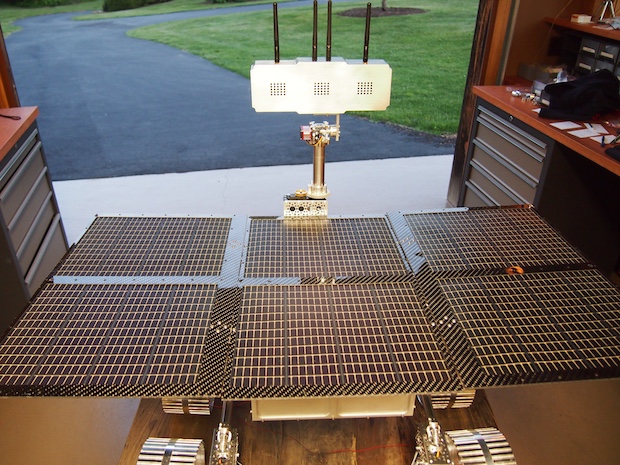
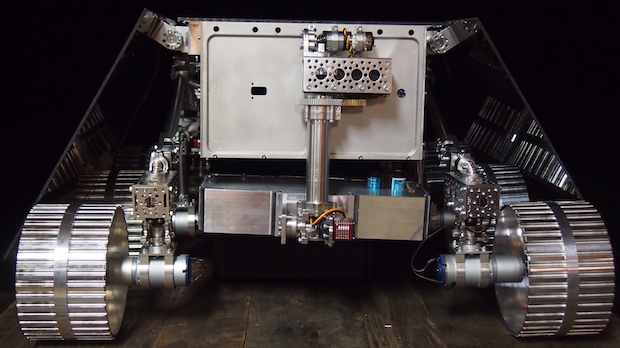
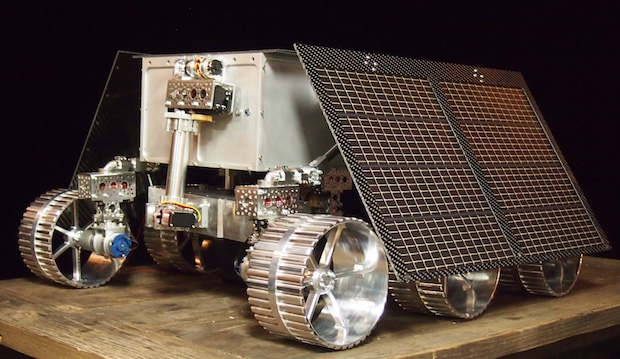
We’ve been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its “Stored Position”. When instructed to do so, the robot folds down its mast and stores it beneath the robot. The solar wings also fold down. The goal of this position is to make the robot more compact for transport on SpaceLS’s rocket. All the components of the robot are machined out of 6061 aircraft aluminum, other than the solar top and solar wings, which are machined carbon fiber.
FRONT VIEW
SIDE VIEW (OUR MOUNTAIN IN THE BACKGROUND)
LUNAR ROVER IN ITS “STORAGE POSITION”, WITH THE MAST AND SOLAR WINGS FOLDED
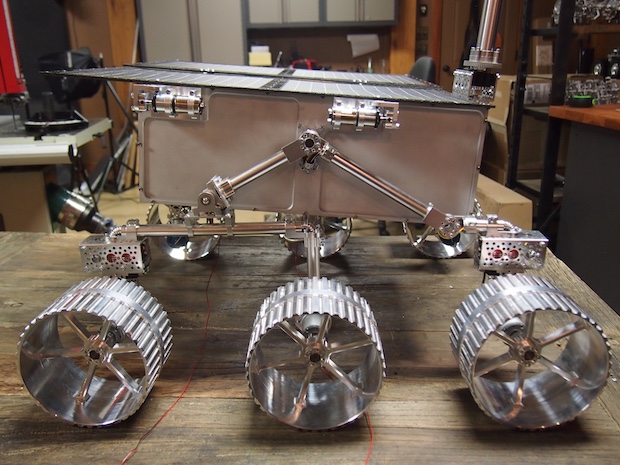
ROCKER-BOGIE SUSPENSION SYSTEM (RIGHT-HAND SOLAR WING REMOVED)
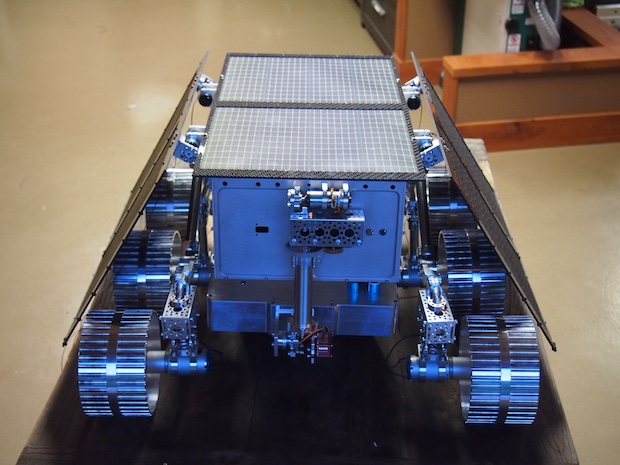
SOLAR TOP AND SOLAR WINGS (REAR TOP VIEW)
FRONT VIEW WHEN IN “STORAGE POSITION”
CORNER VIEW WHEN IN “STORAGE POSITION”
FRONT VIEW – MAST TURNED
TESTING A ROVER OF A SIMILAR DESIGN AT ASHEVILLE MUSEUM OF SCIENCE (SOLAR WINGS REMOVED) https://vimeo.com/186489953