We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first...
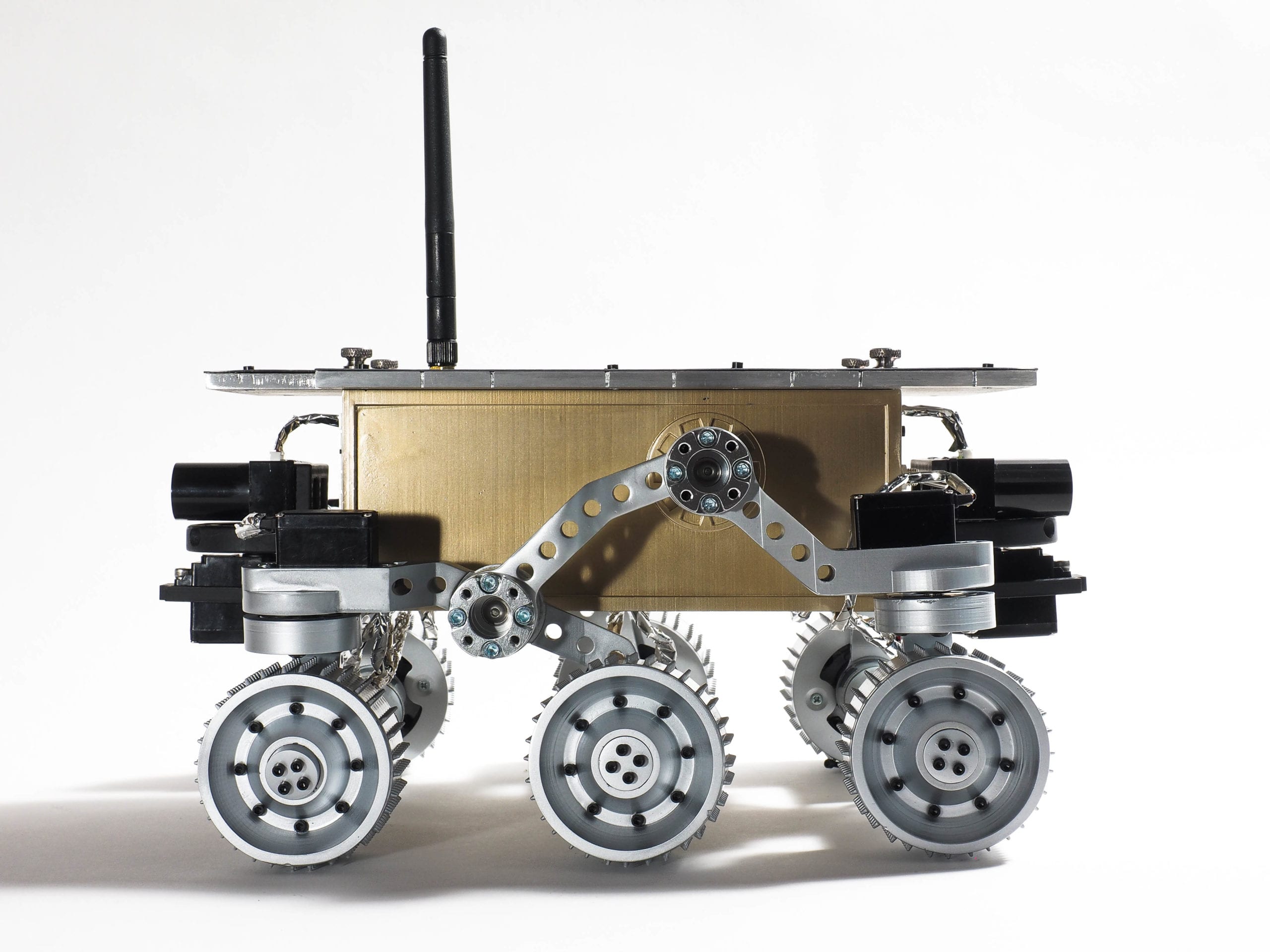
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first...
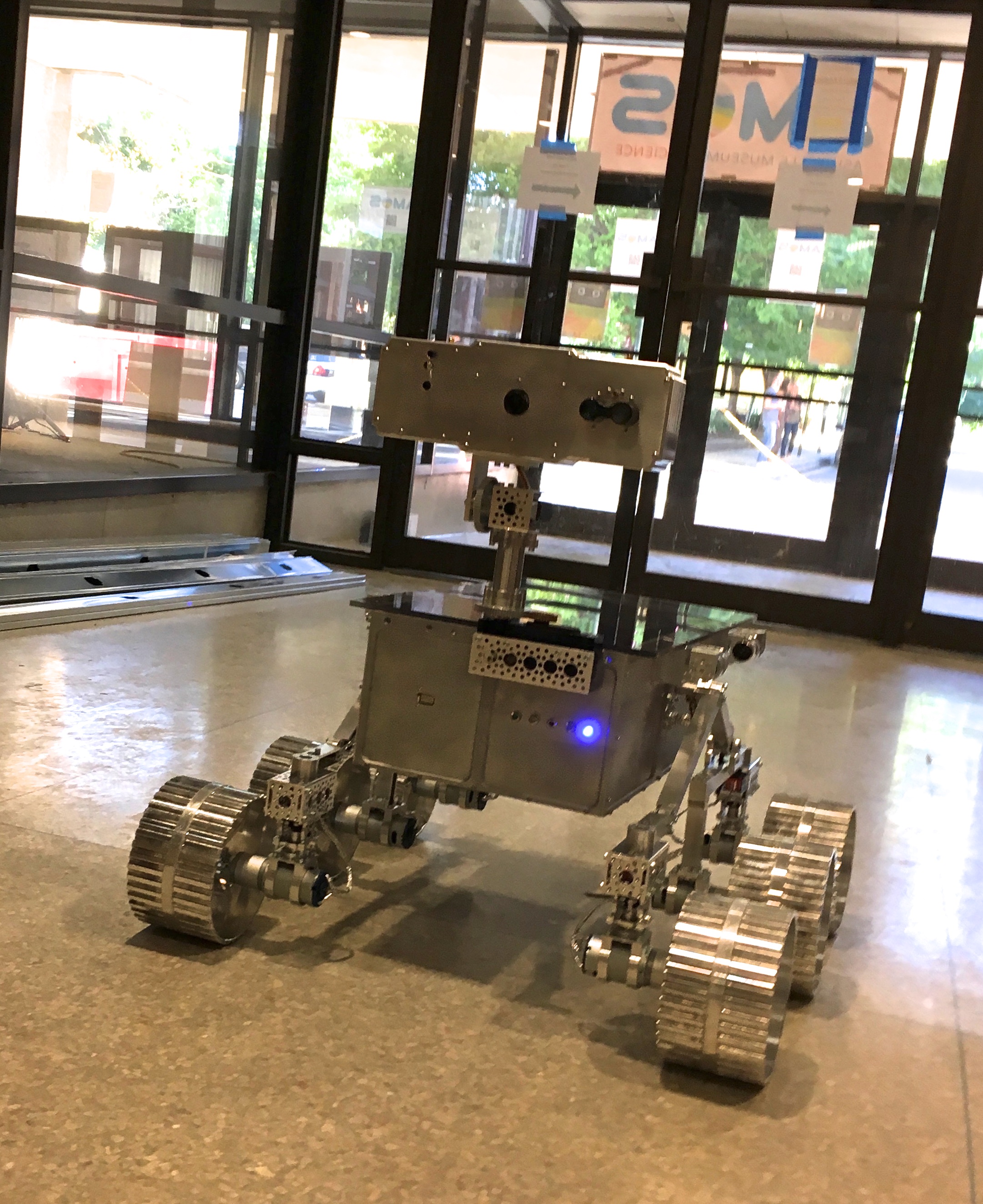
In this video, we're taking the Lunar Rover on a quick visit to the Asheville Museum of Science (AMOS) to test it out...
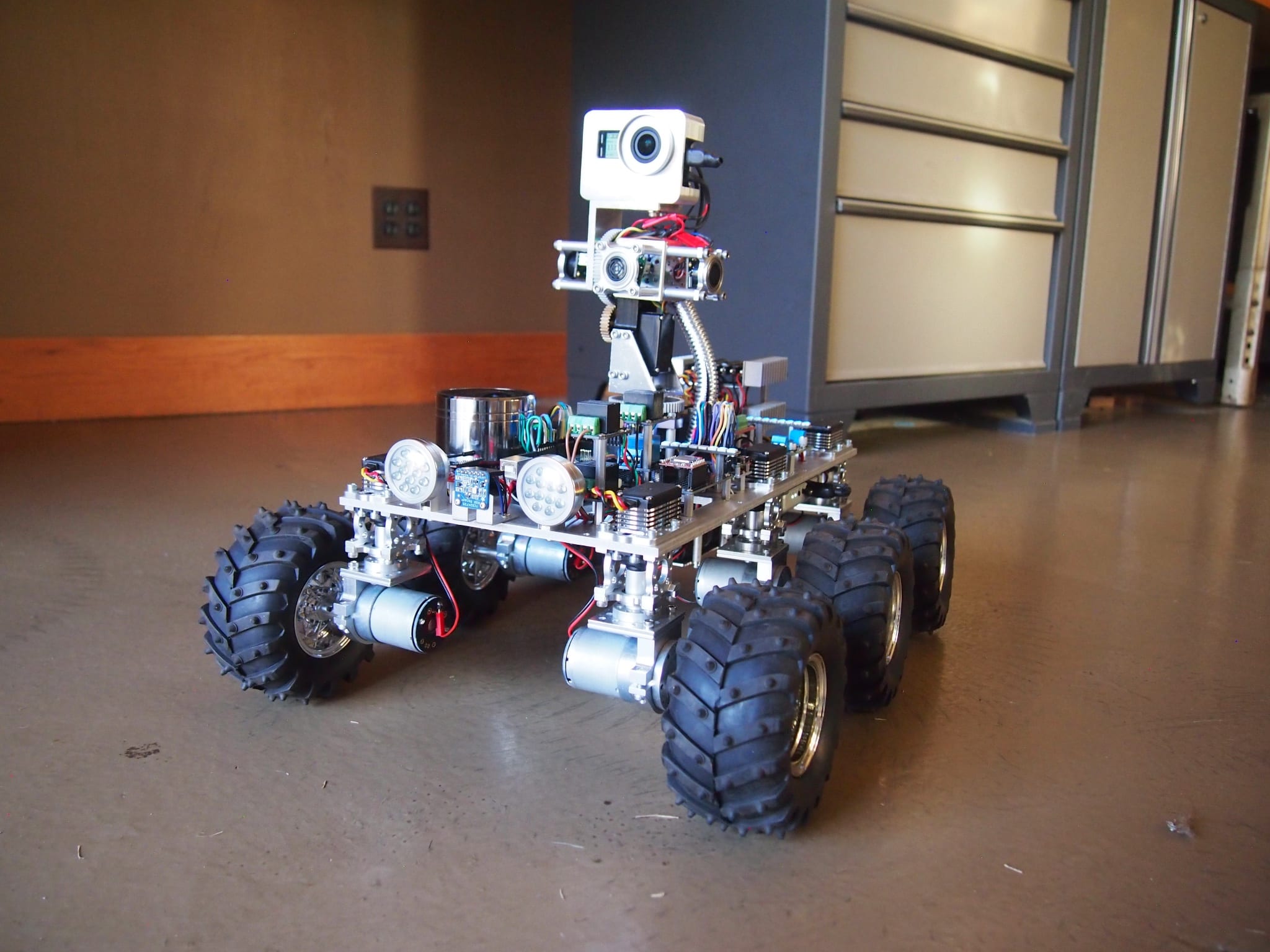
We have built a sturdy but compact 6-wheel-drive (6WD) rover for museum exhibits with limited space. In this video, we...