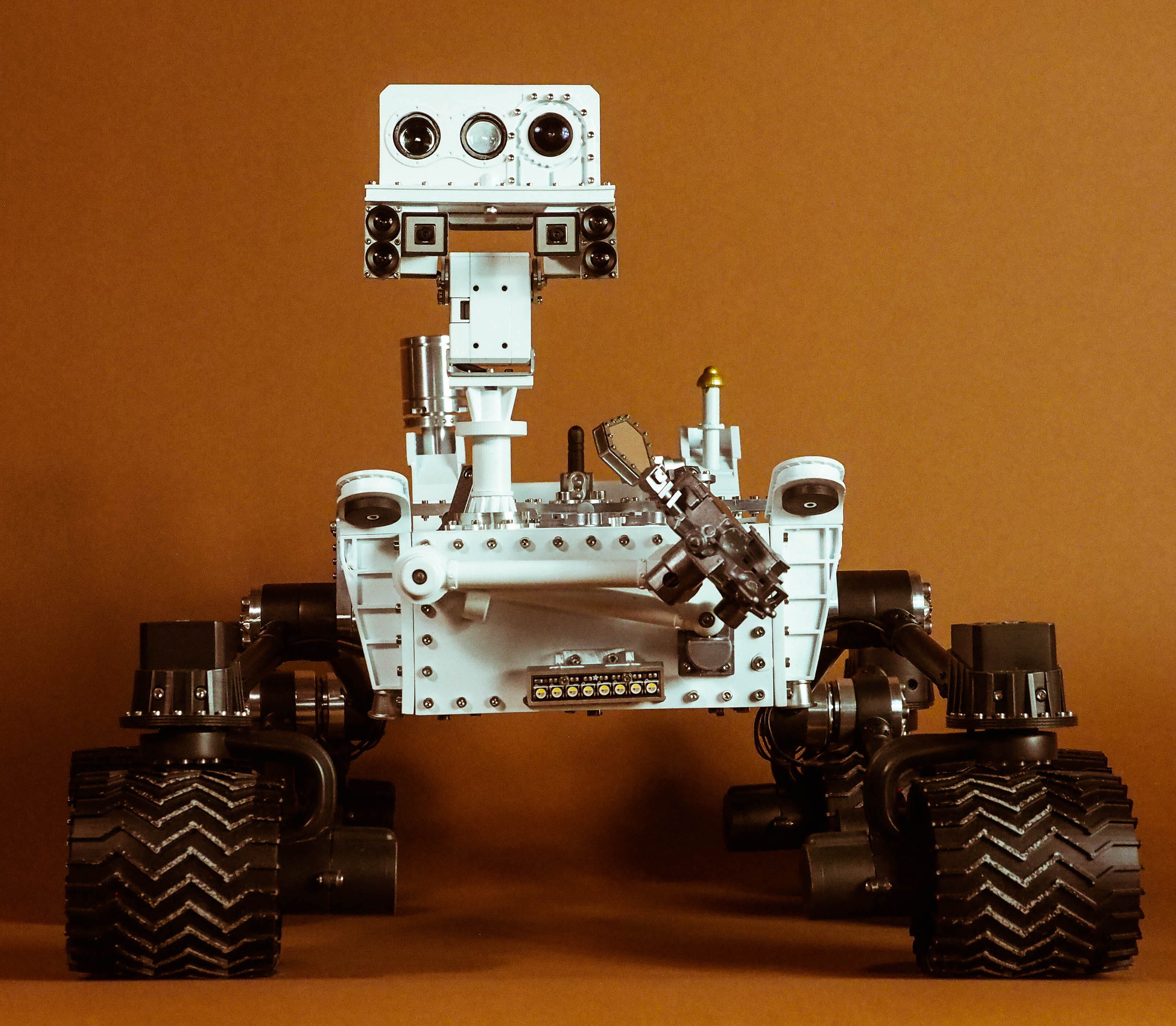
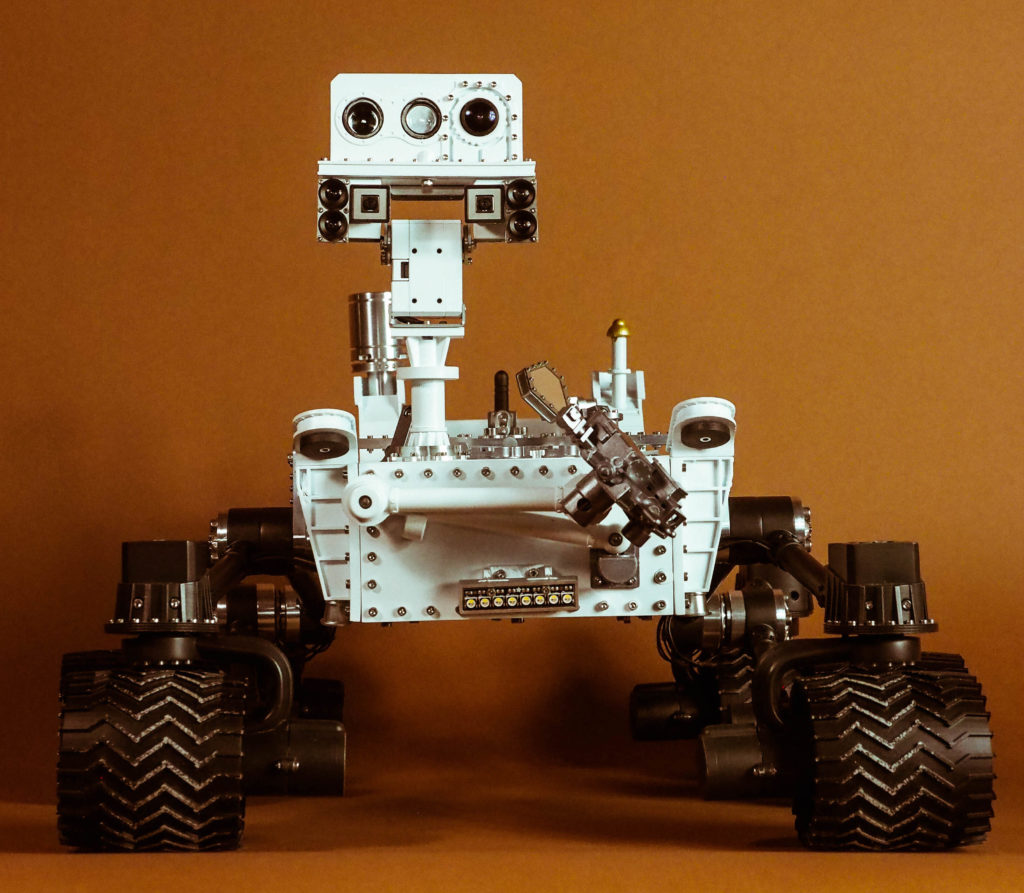
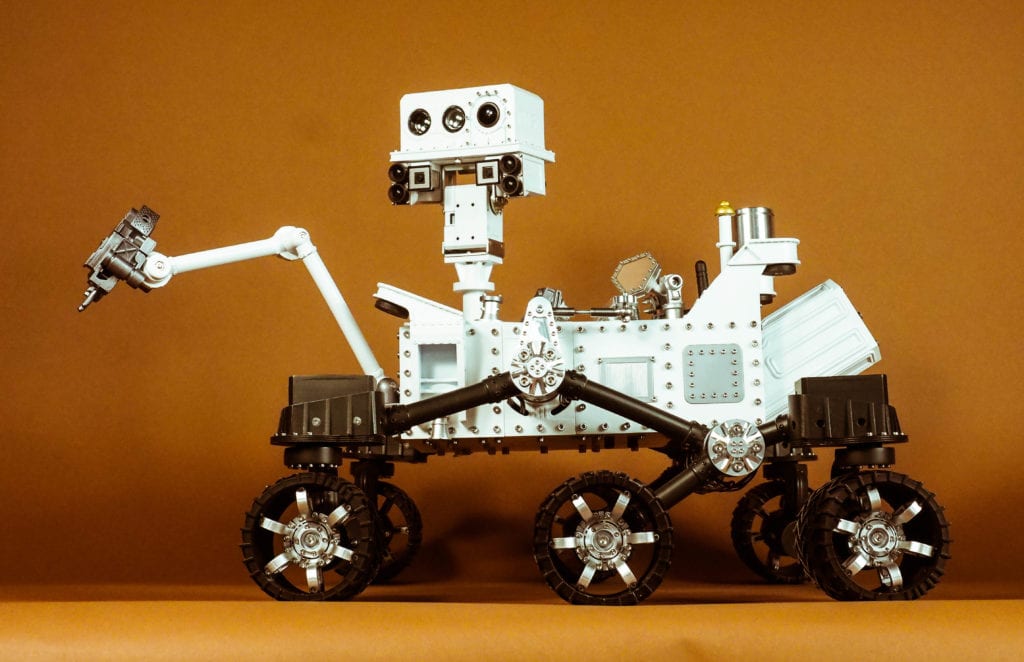
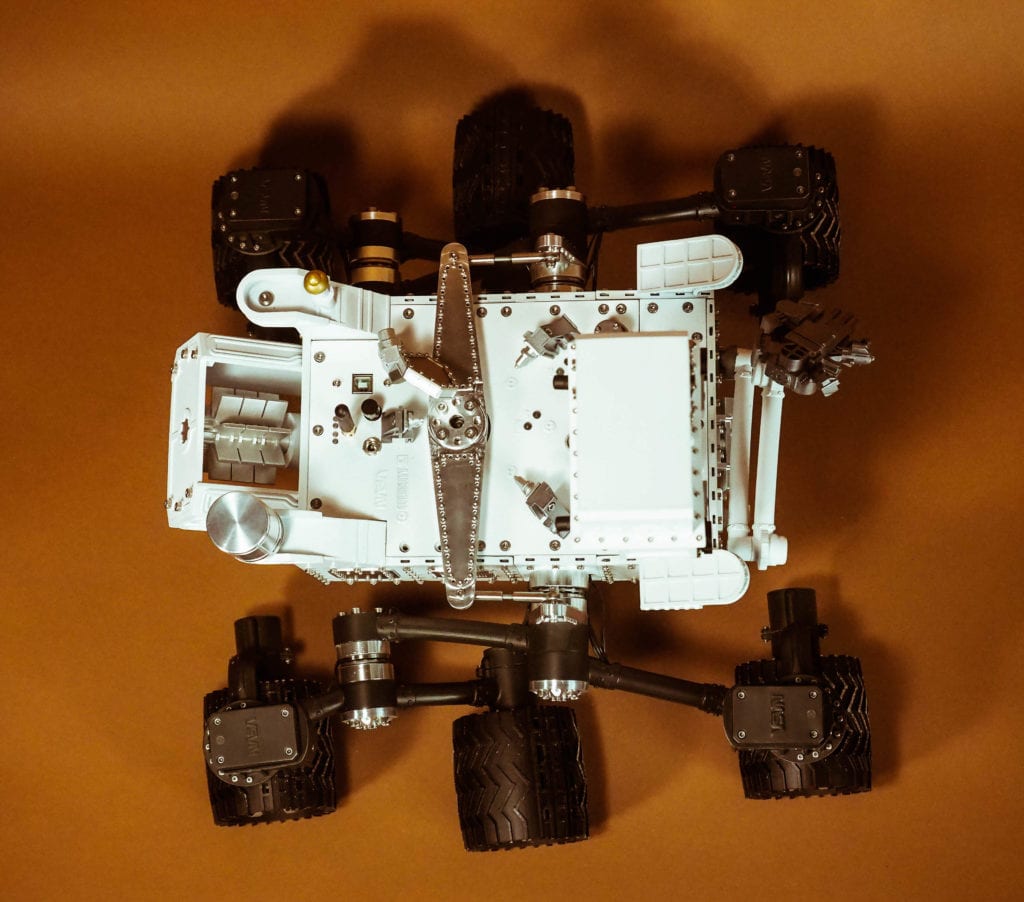
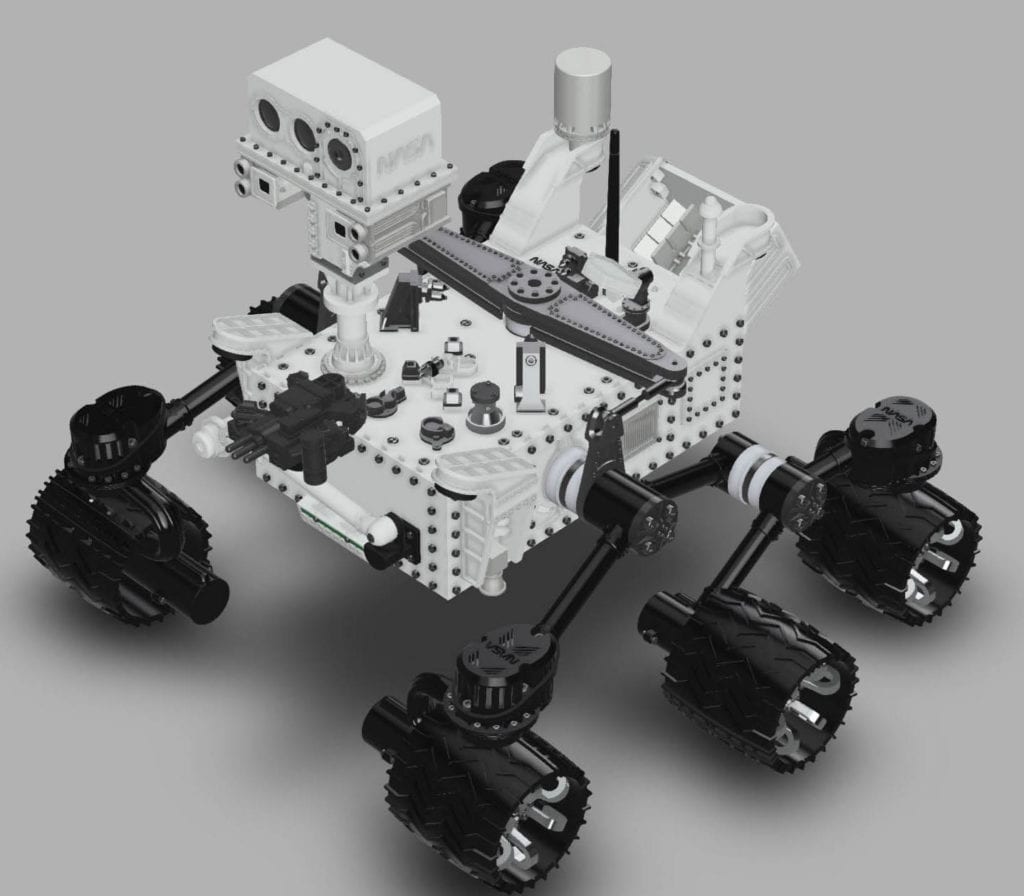
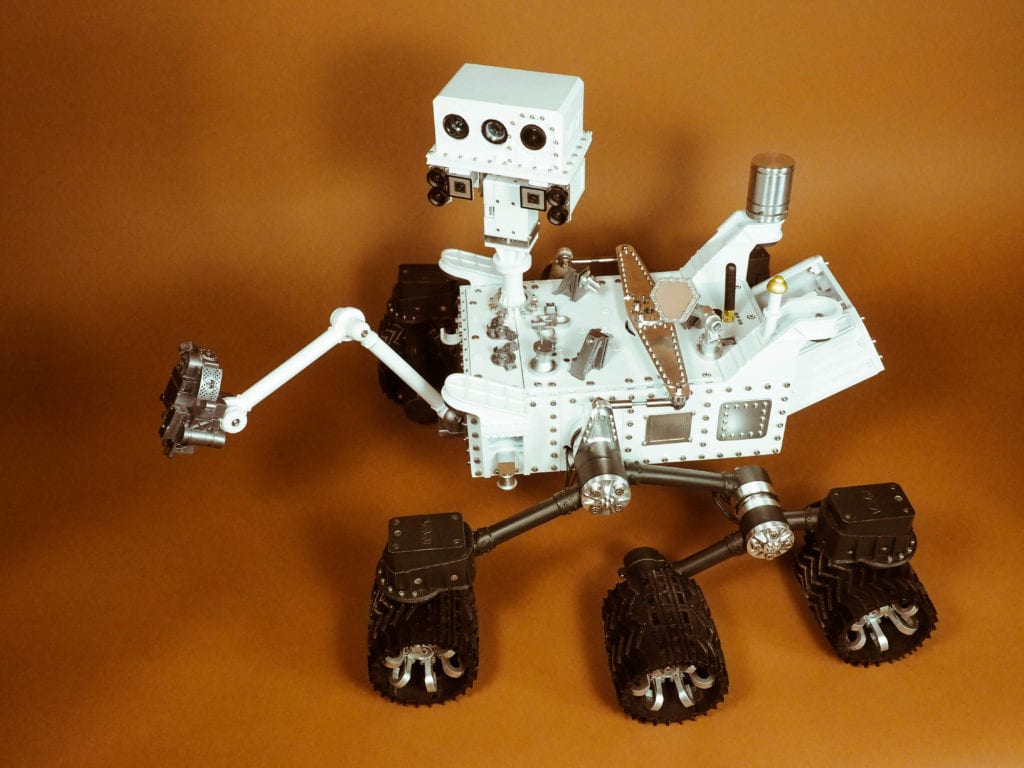
We are excited to share our latest and most ambitious robot, the Curiosity Mars Rover. This is a highly-interactive, 1/10th scale functional replica of the NASA Curiosity Mars Rover. This project was ambitious for us in two main ways: First, we worked very hard to make the robot visually accurate to the original NASA rover. This necessitated custom designing and manufacturing nearly every visible component on the robot. One of the key challenges was to get the required level of detail and functionality into such a small scale robot. Second, we encapsulated all the features and capabilities we wanted for this robot into a robust, maintainable, and modular electronics package based on a stack of custom Printed Circuit Boards (PCB) that we designed. This post focuses on the external view of the robot while future posts will focus on the electronics and functionality.
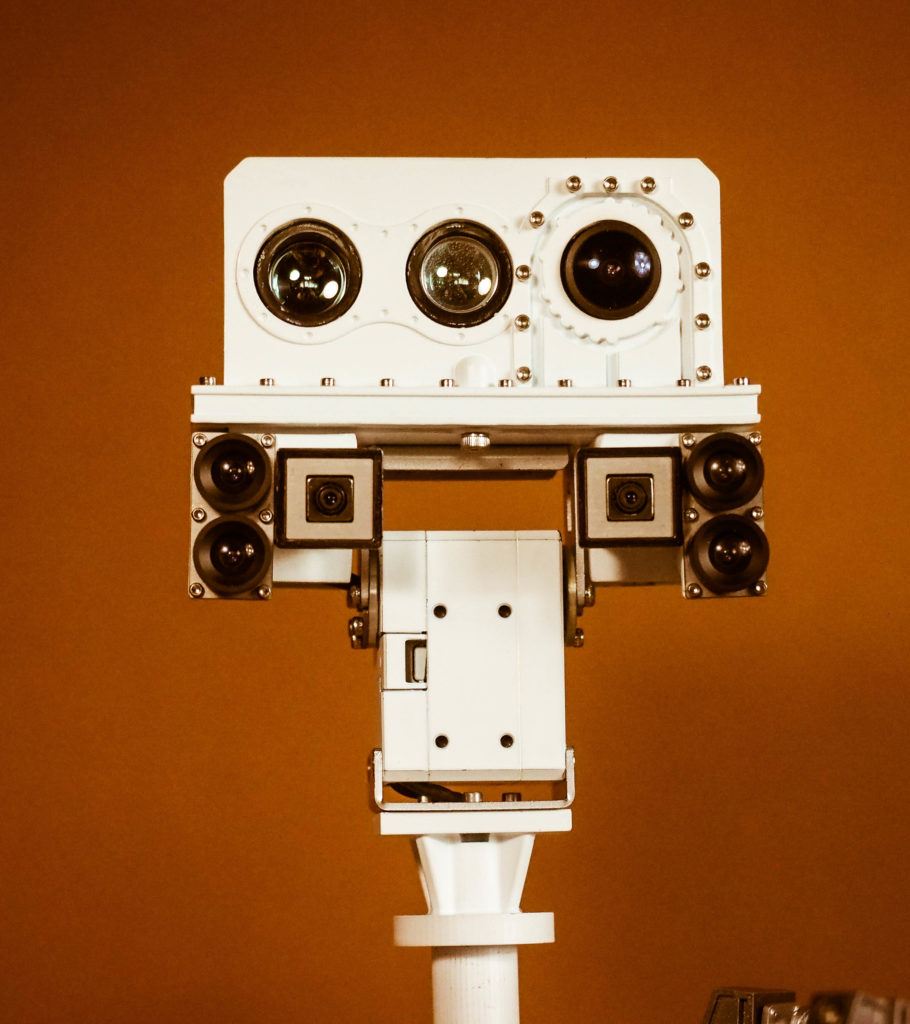
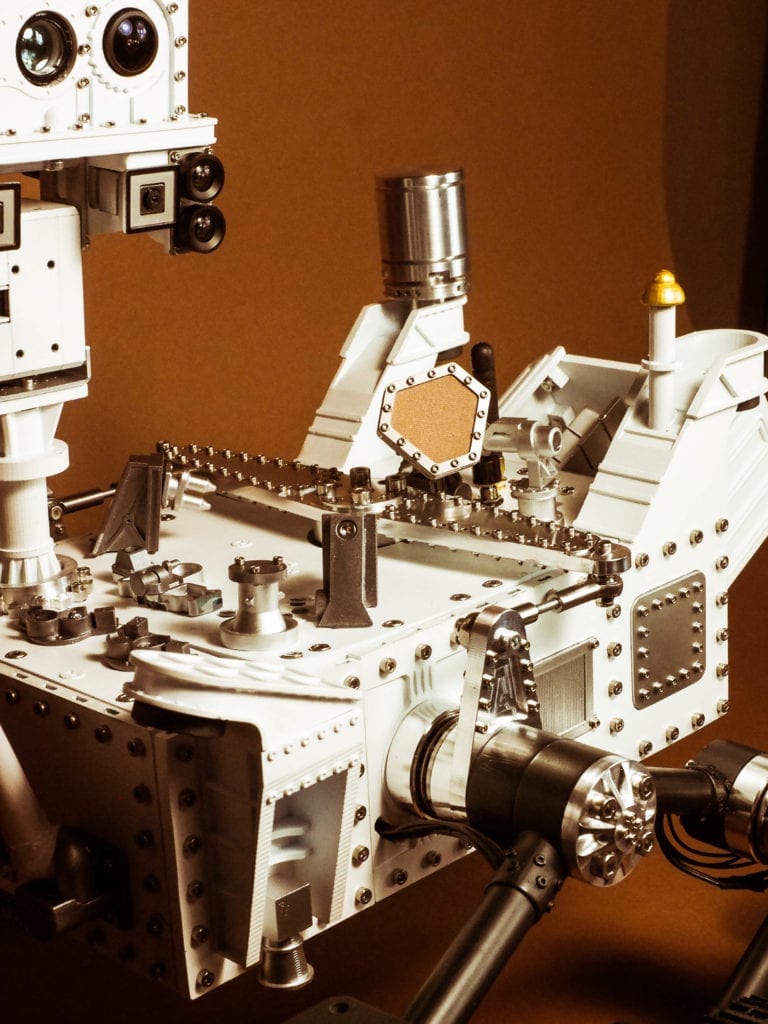
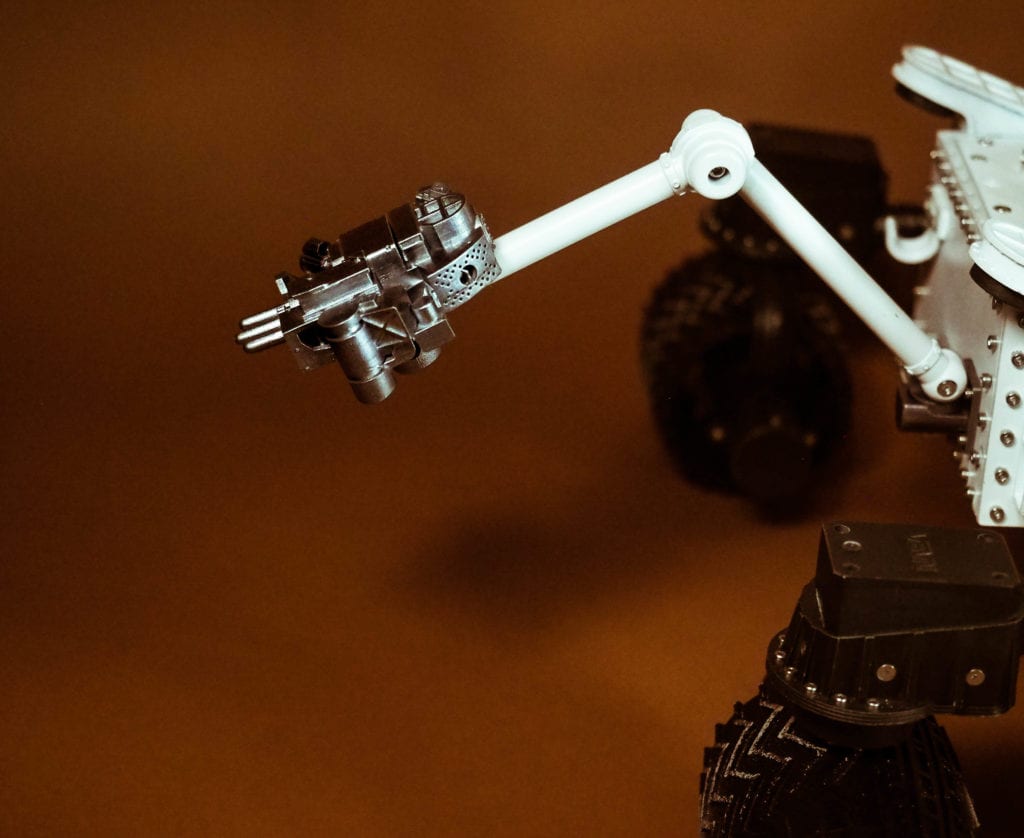
Our Curiosity Mars Rover includes a Six Wheel Drive System (6WD), a fully-functional Rocker-Bogie Suspension System (RBSS), servo steering, a functional differential bar, a 360-degree camera/sensor turret, 3D LIDAR sensing, autonomous behavior, radio data transmission, and much more—all as per the real Curiosity. The rover is approximately 17” long x 20” wide x12” high.
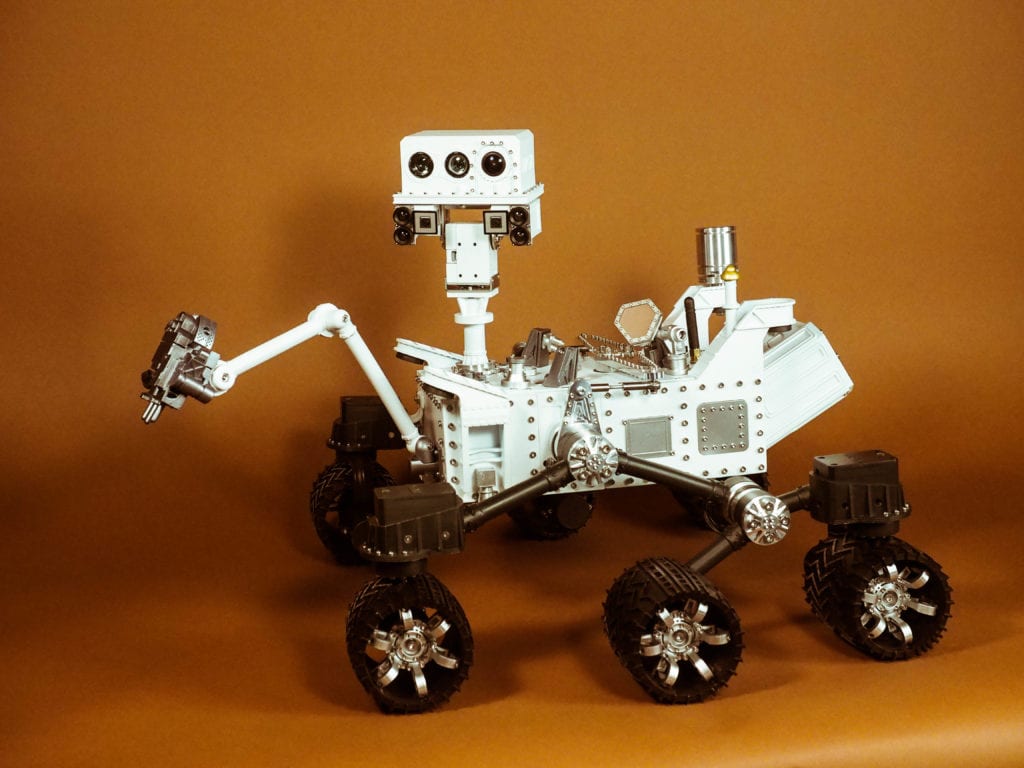
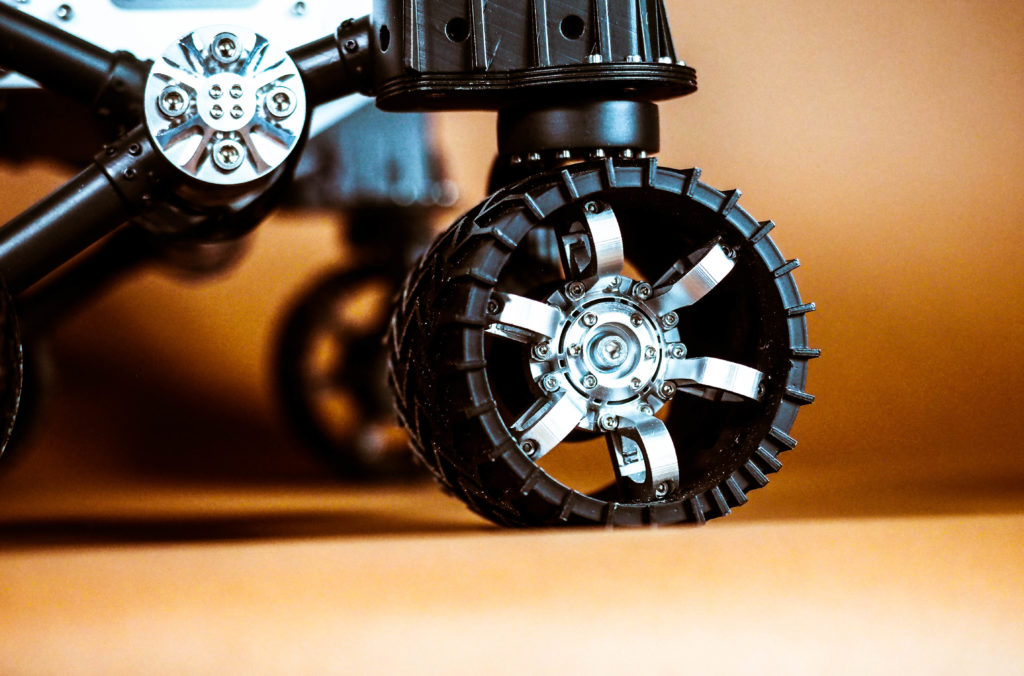
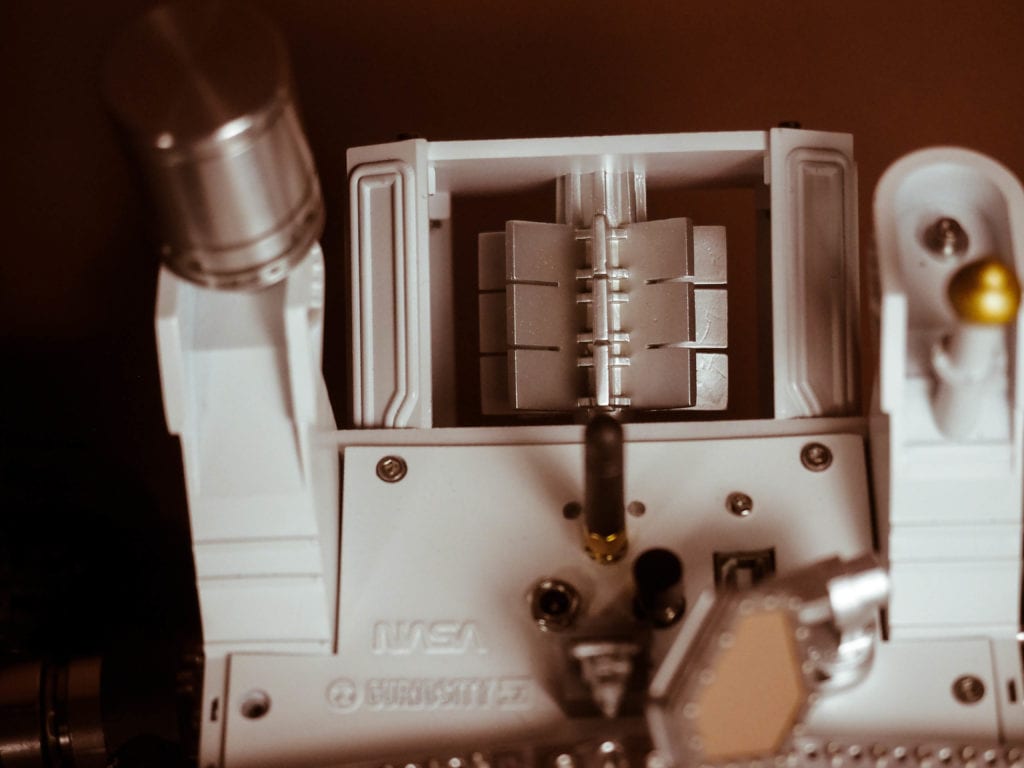
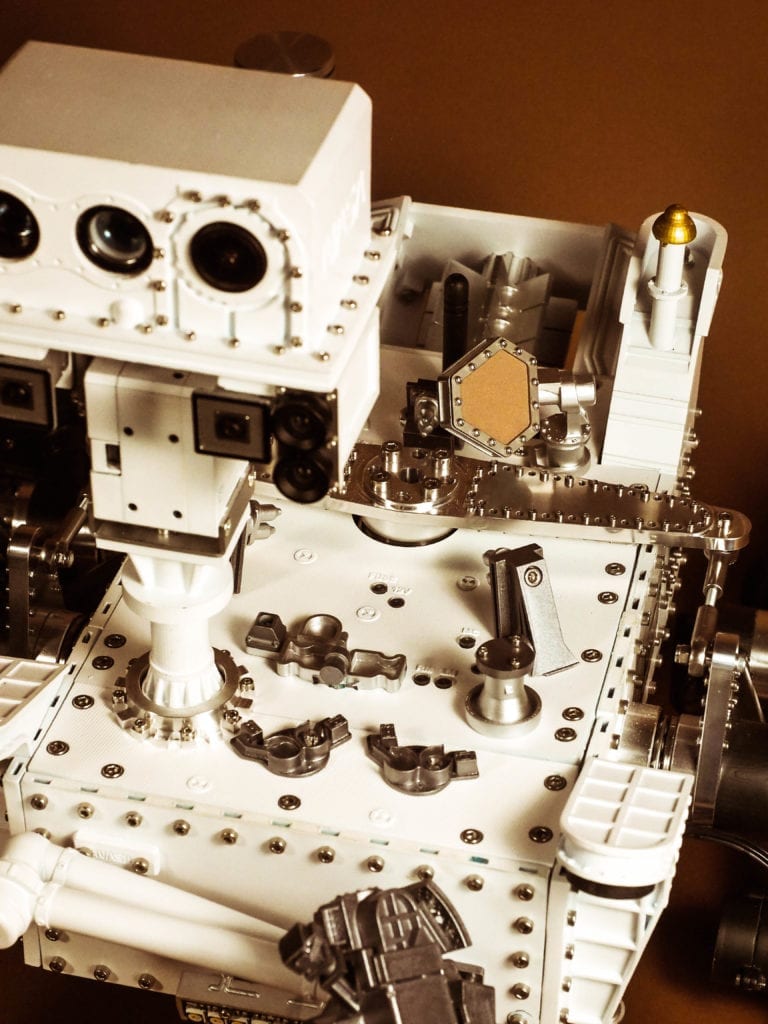
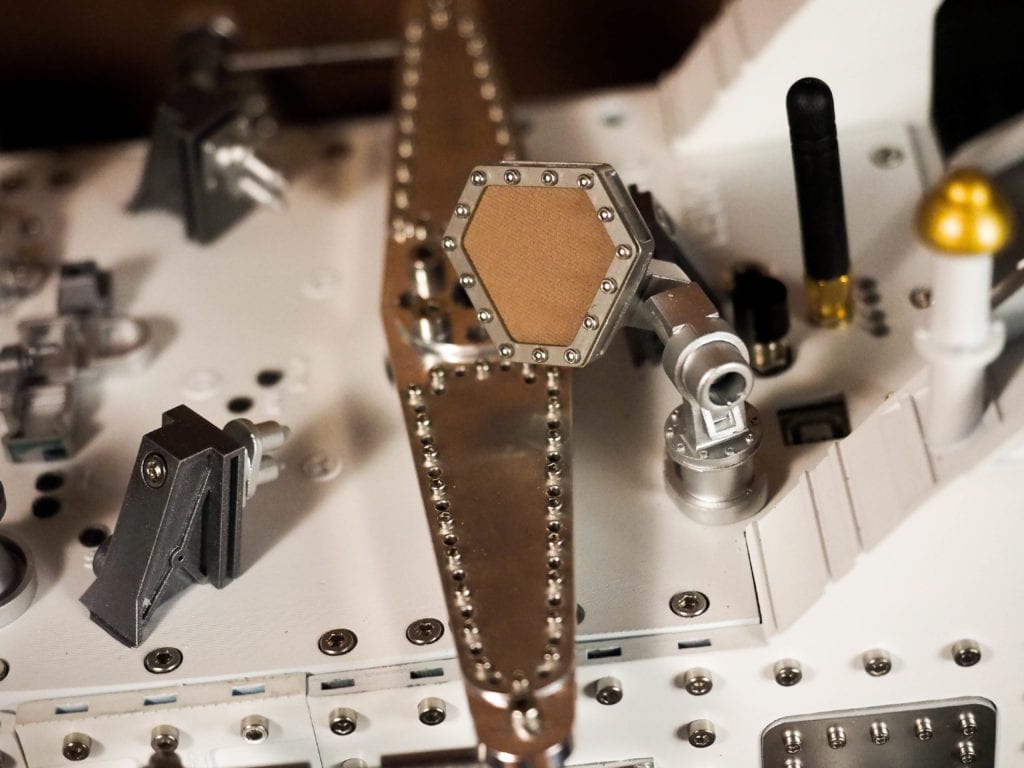
To achieve the visual appearance we wanted, we carefully studied all the NASA photographs and drawings we could find, designed each component using the Fusion 360 CAD software (special thanks to our friend Dan Kreisher!), and then manufactured the custom parts one by one, including all of the body components, chassis struts, wheels, hubs, turret, top deck details, side details, and all the other visible components. All of the white parts, the struts, the servo covers, the wheels, and many other parts were printed in-house on our Formlabs SLA 3D printer out of engineering resin, then carefully sanded and painted (special thanks to Jennifer Beatty and Mike Dutra for helping out in this critical area!). The metal parts were machined out of 6061 Aluminum on our in-house Tormach CNC Mill and/or by our friend John Saunders. Several of the small stainless steel parts (around the camera lenses on the masthead) were laser cut for us by our friends at Pololu.
We’ll provide more details on the electronics and the build in the future, but here is a quick run down of some of our main sources: Pololu: motors, shaft hubs, motor controllers, smart switch, current sensor, and voltage regulators. PCJR: Teensy 3.6 microcontroller. DigiKey: resistors, capacitors, relays, connectors, wires, and all other discrete electronic components. McMaster-Carr: screws, spacers, nuts, raw material, and other fasteners. Robotis: Dynamixel servos. Sparkfun: Xbee radio board, LIDAR, and other electronics. Adafruit: Neopixel and other electronics. Amimon: Connex Prosight HD Video.
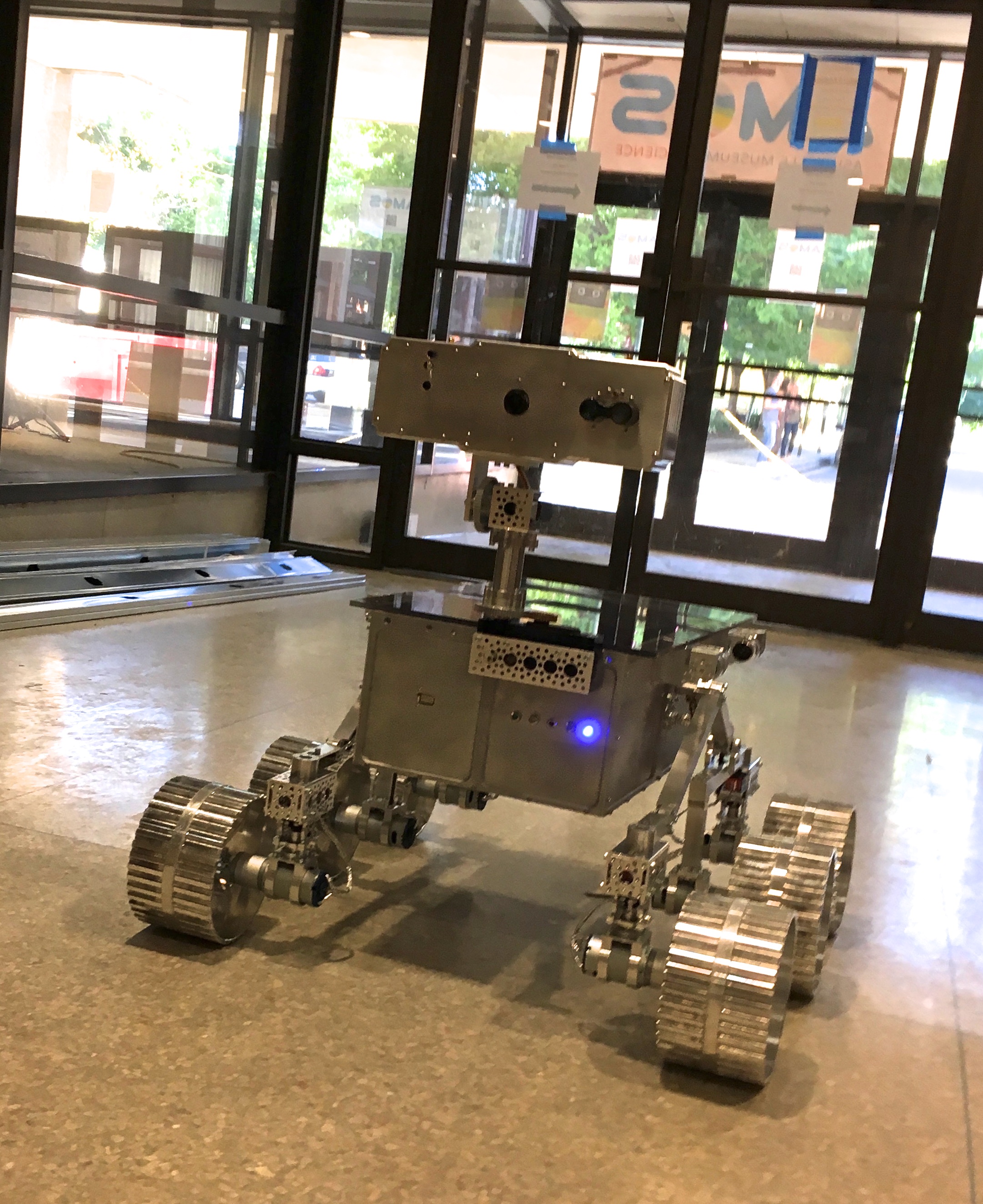
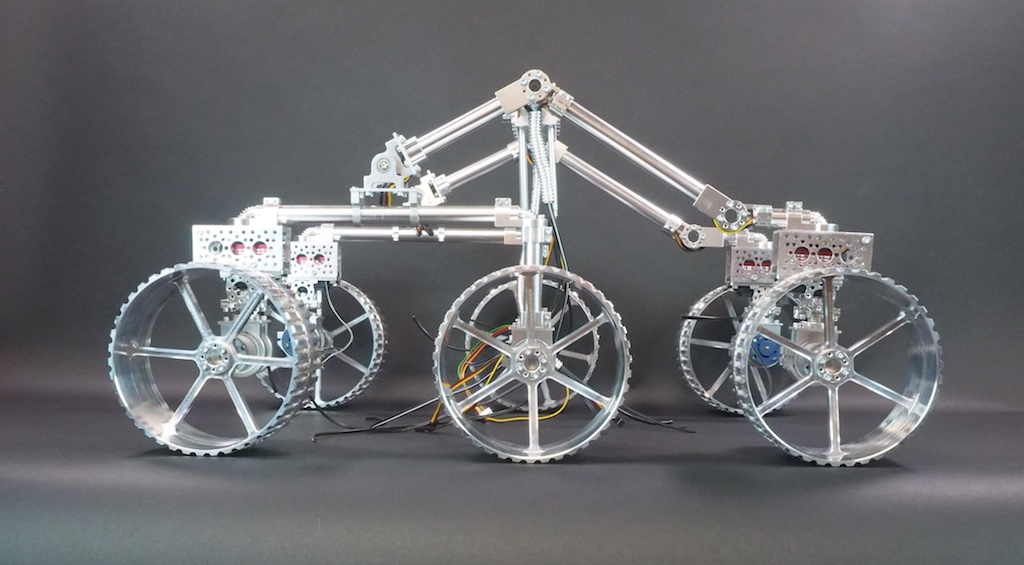
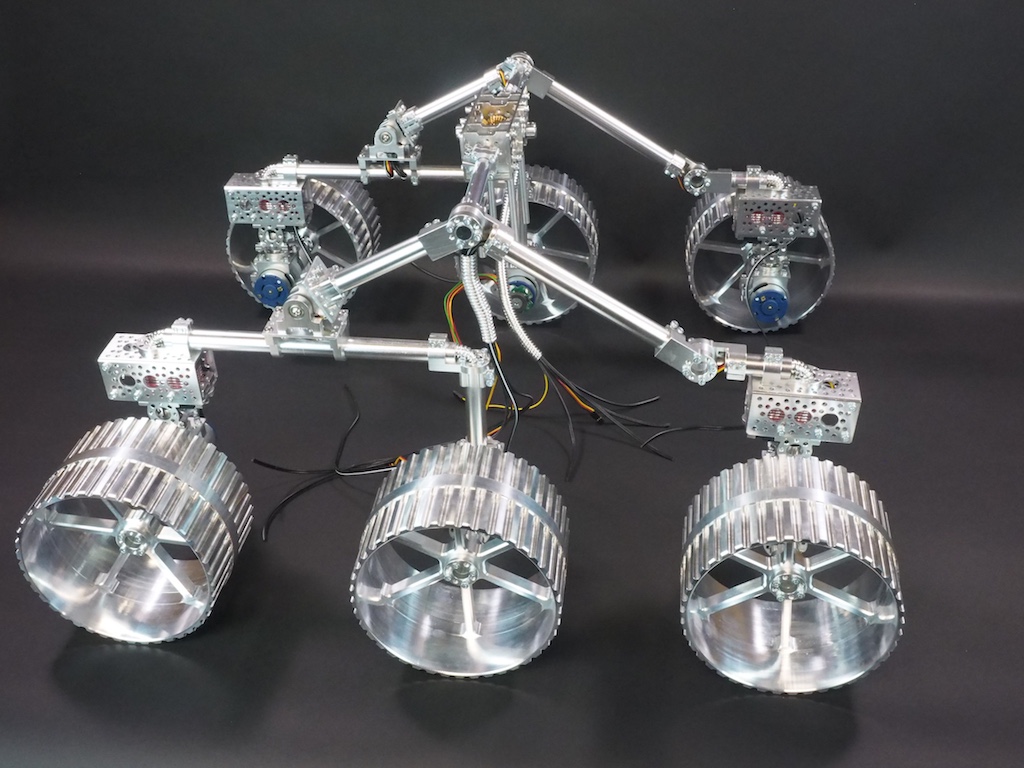
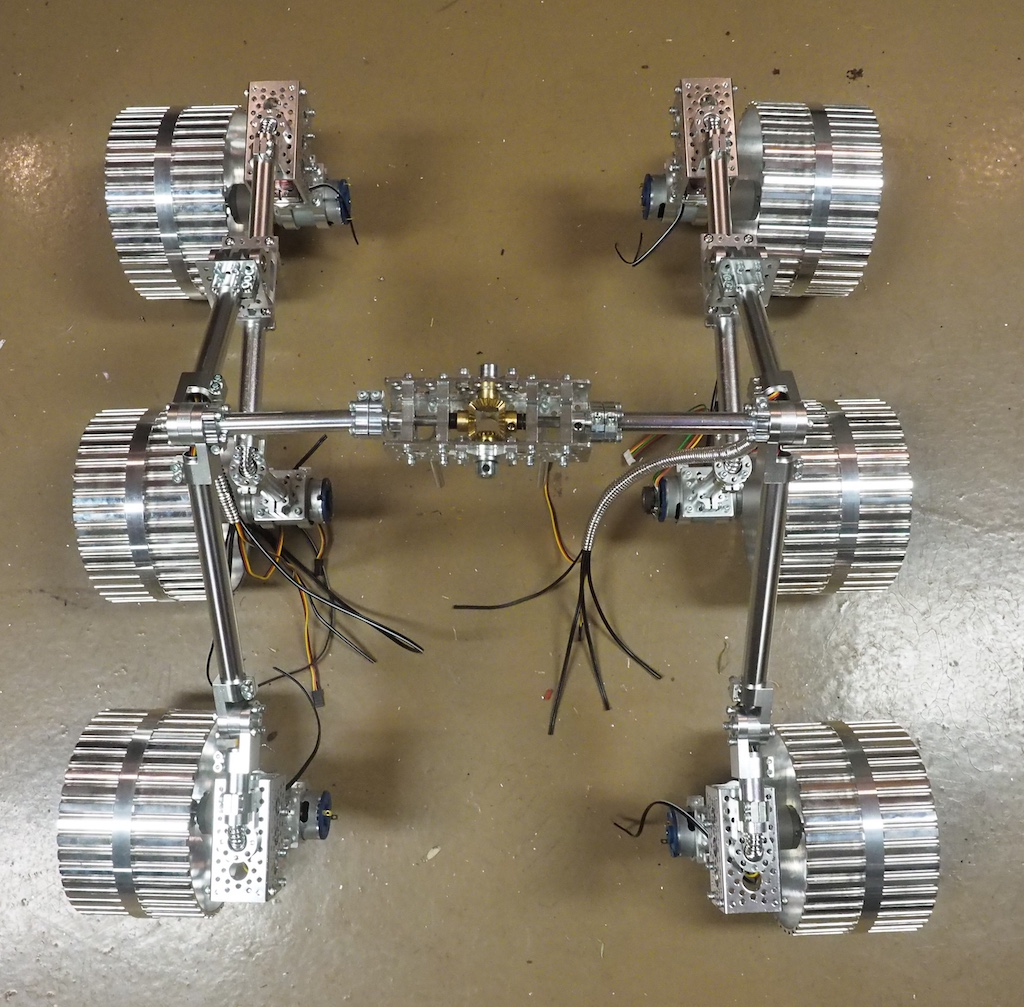
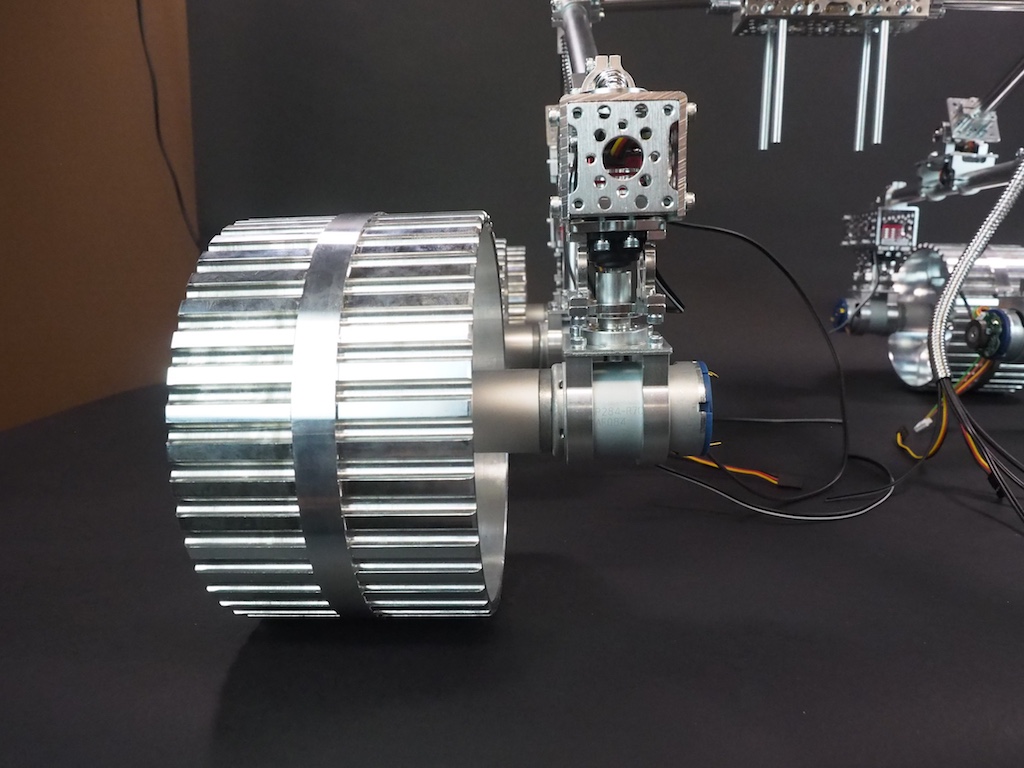
SpaceLS, a rocket company in the UK, has asked Beatty Robotics to team up with them to pursue a mission to put a rover on the moon. The first step in the process is for Beatty Robotics to design and construct a prototype for SpaceLS to use for testing, experimentation, and development. We’ve been working hard on the project, but we’ve been so busy we haven’t had time to take any pictures until now! Here are our first photos of the Lunar Rover’s rocker-bogie suspension system, counter rotating universal joint, steering servos, motors, and wheels. We designed the wheels to be large (6+” diameter) and wide for traveling through lunar ash. All the components of the robot will be machined out of aluminum, titanium, and carbon fiber. When it’s done, the robot will be solar powered and run on an Intel Edison. These are work-in-progress photos. The robot’s core/body, solar panels, video/sensor mast head, and other components are not shown.
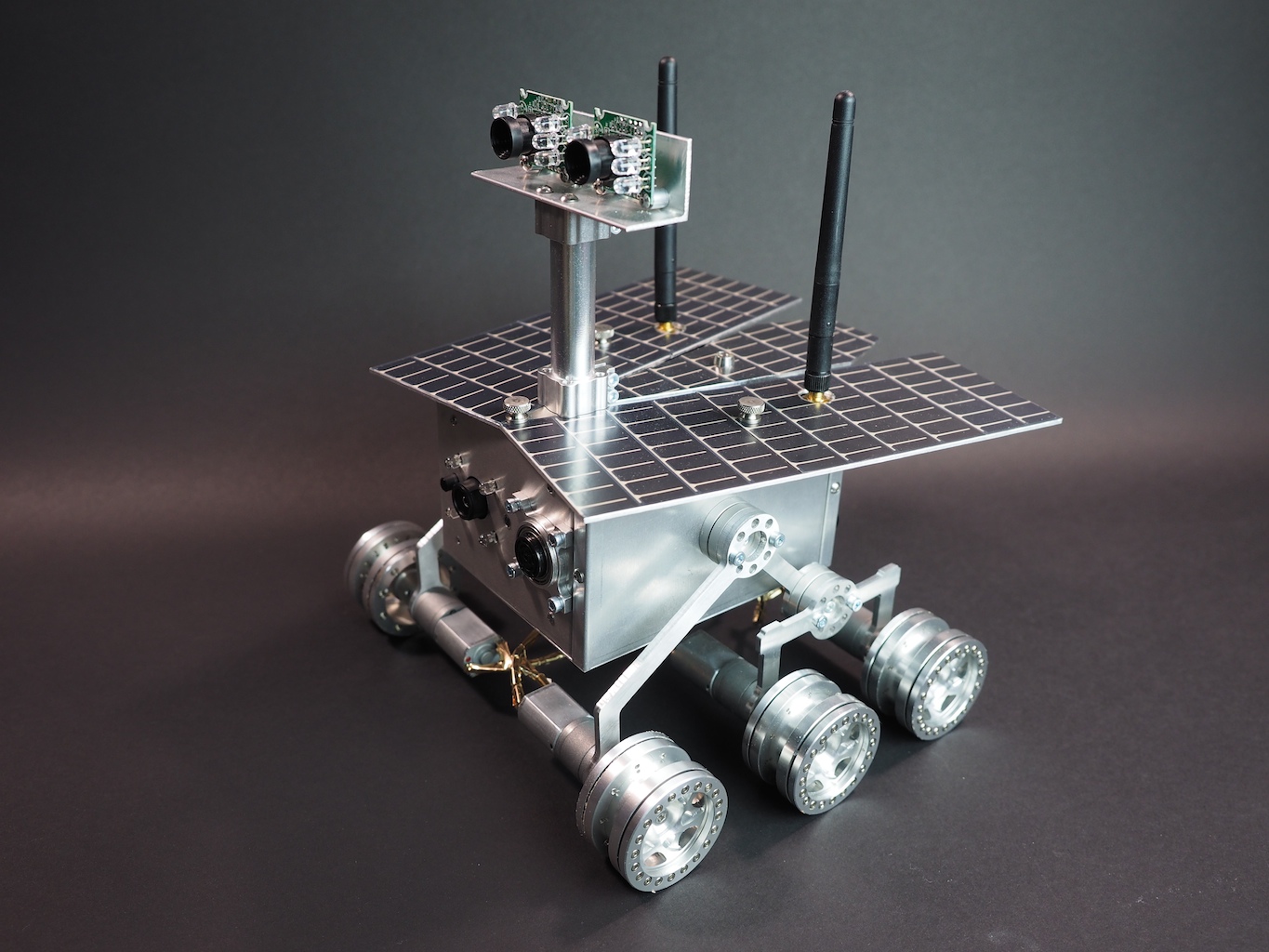
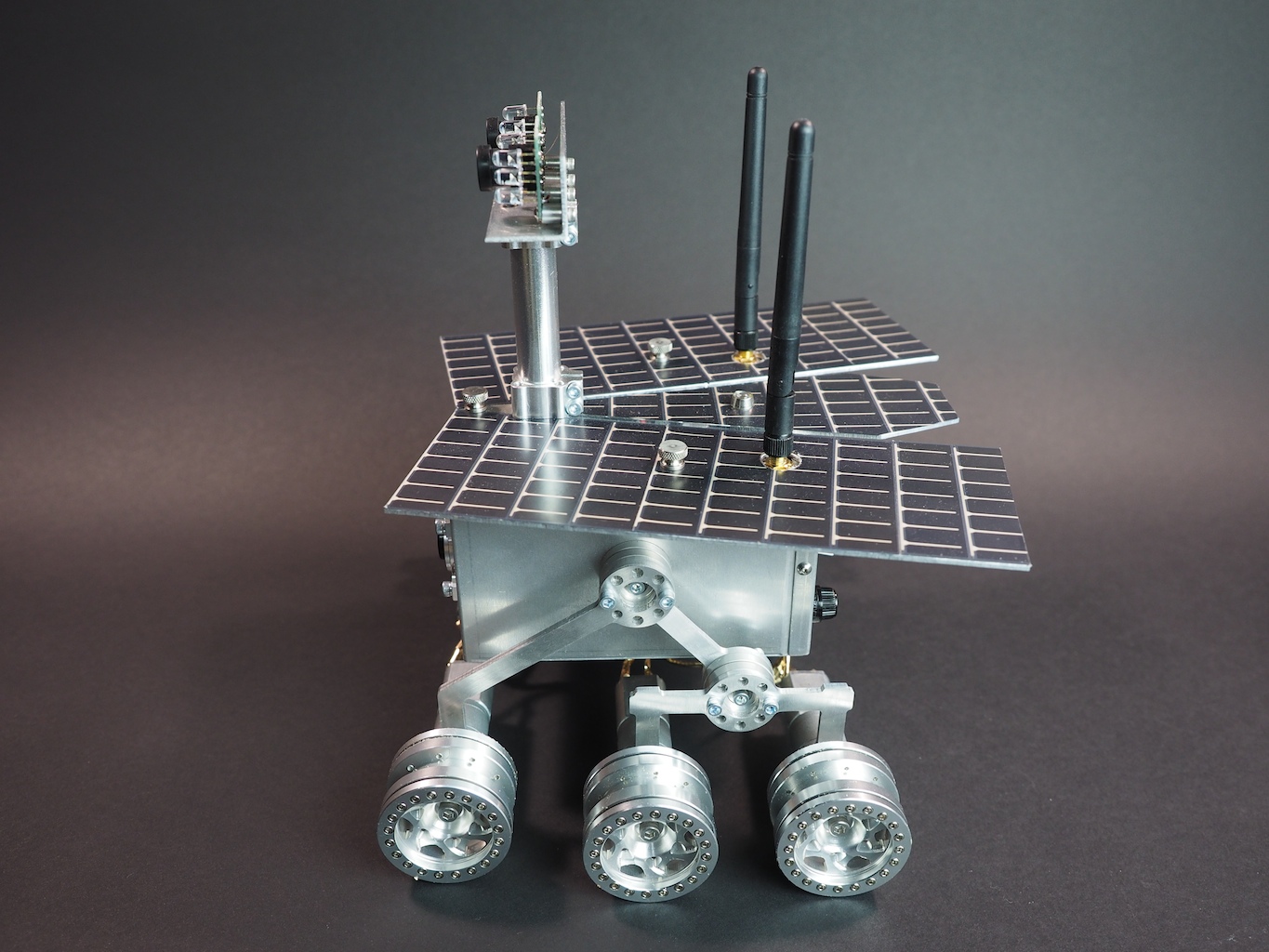
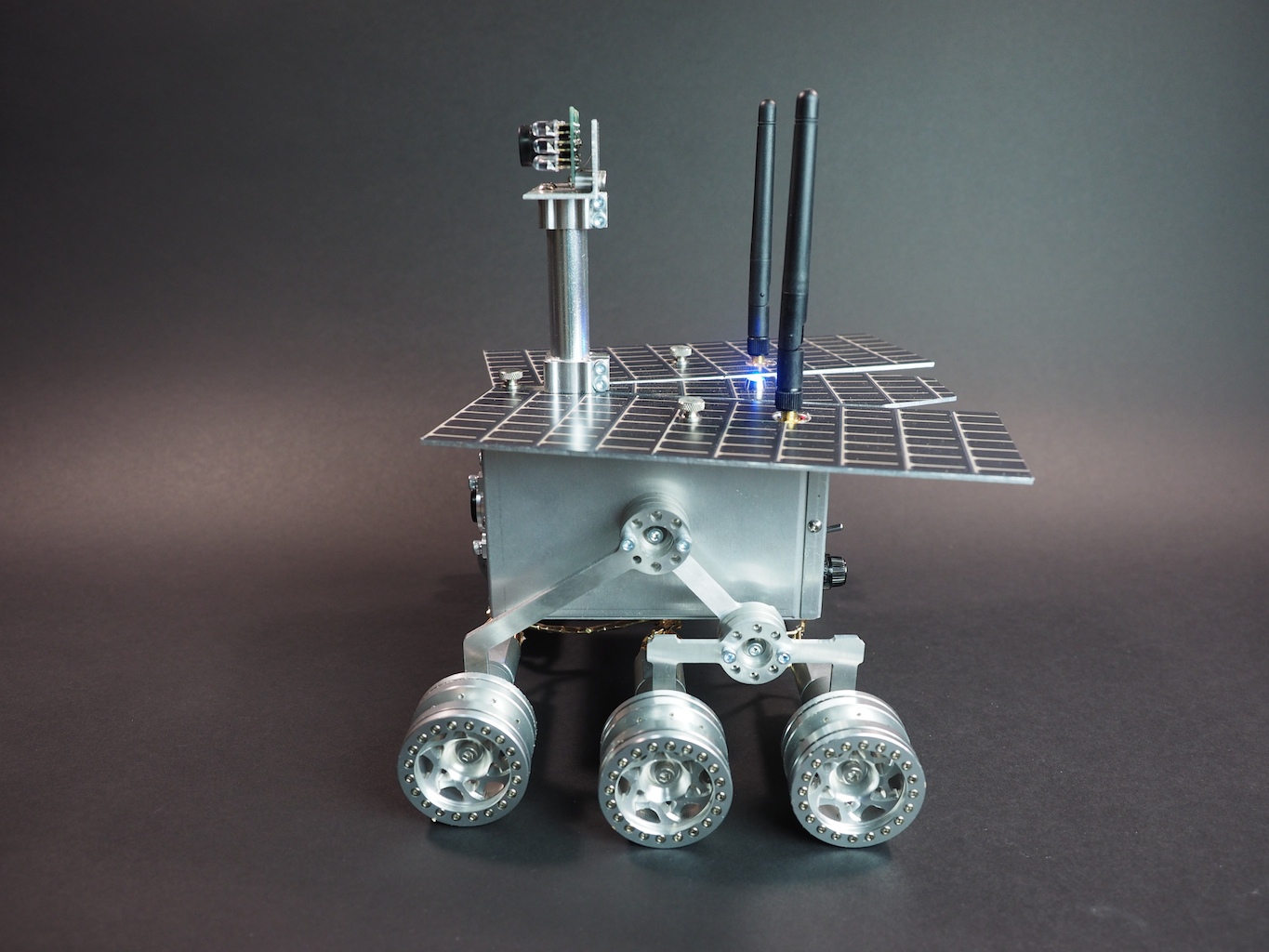
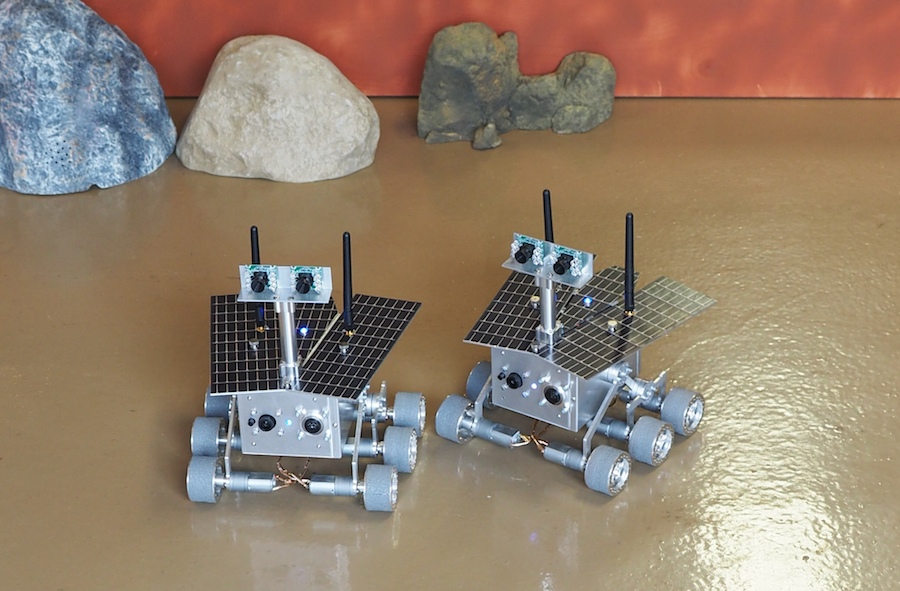
We have just completed and shipped two new Mini Mars Rover exhibits to Petrosains, The Discovery Centre in Kuala Lumpur City Centre.
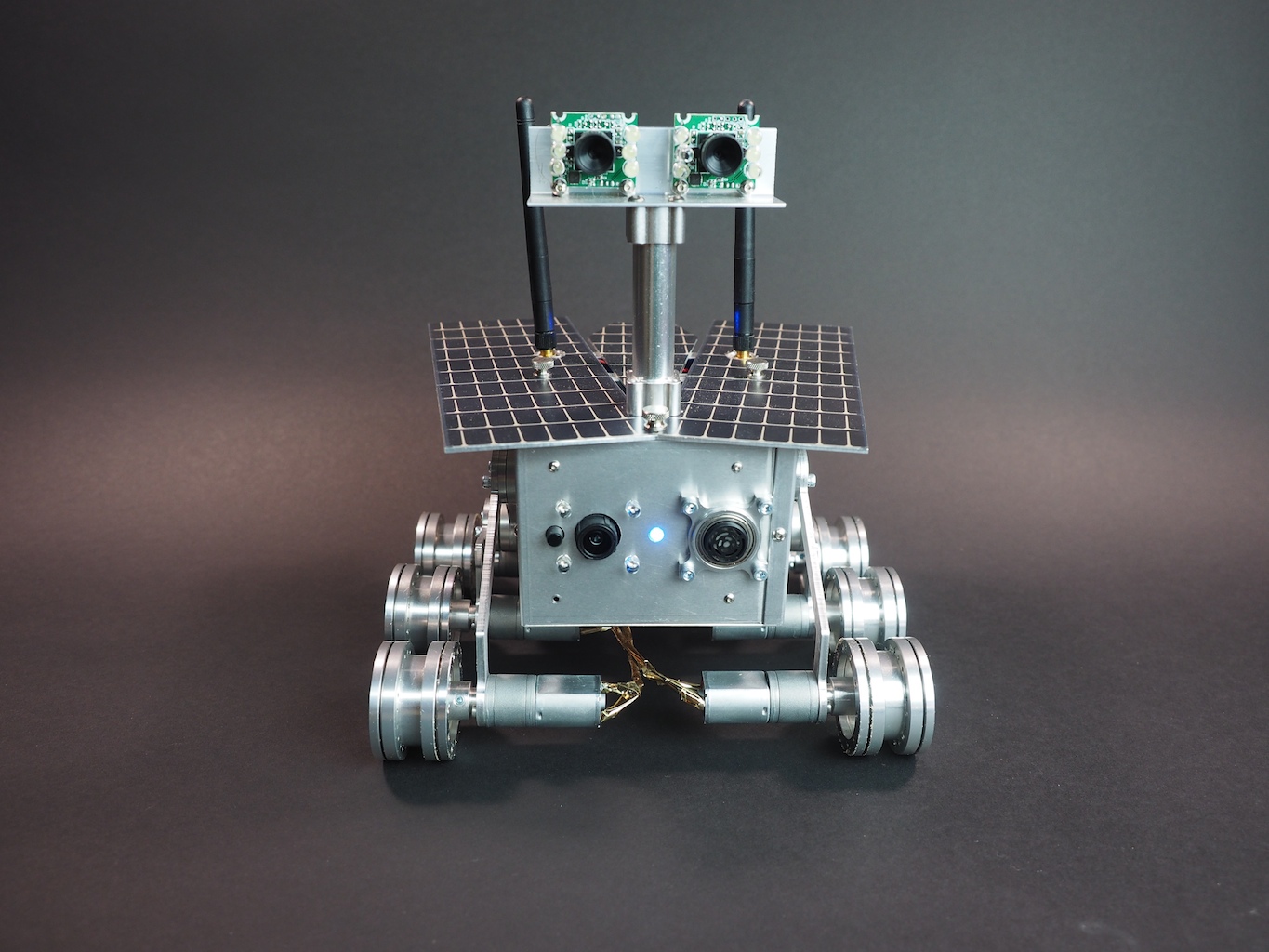
Although very small in size, these little robots pack some excellent features. They have a simplified, CNC-machined rocker-bogie suspension system, thin film solar panels, LED indicator lights, six small but powerful gear motors, an Arduino Nano microcontroller, front and rear sonars for object avoidance, a voltage sensor for battery charge monitoring, an audible battery alarm, an on-board battery charge jack, an Xbee radio, and a high-resolution infrared camera. They operate via real-time Remote Control and/or autonomously in conjunction with our “Mars Rover Controller” software. These two robots will be used as functional hands-on exhibits at two different locations. The exhibits are scheduled to open in November, 2014. So, the next time you’re in Malaysia, go check it out.
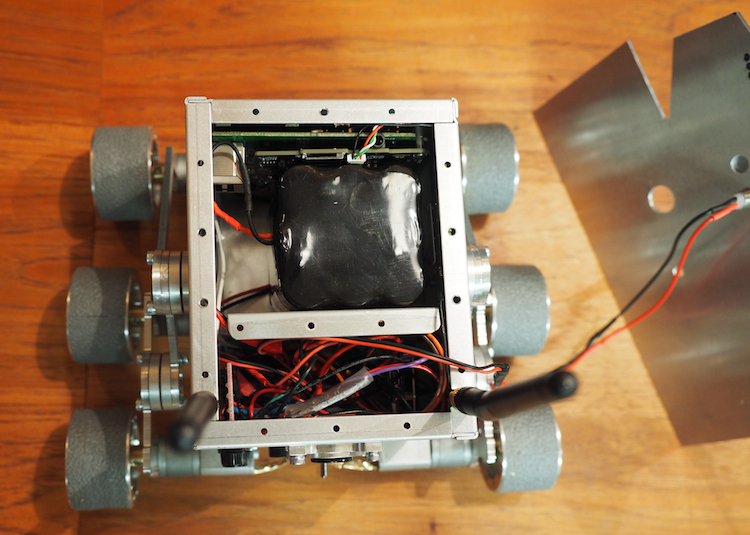
With the top removed, you can see the inside of the robot. We crammed the camera and a sonar sensor at the front. The wifi module (not visible) is attached to the side. The Arduino microcontroller, rear sonar, voltage sensor, motor controller, fuse, battery alarm, xbee radio, two antennas, and power switch are all crammed in the back section. This leaves the center area for a huge 10,400 mAh 7.4V Lithium-Ion battery (black square in center), which will allow the robot to last a long time on one charge.
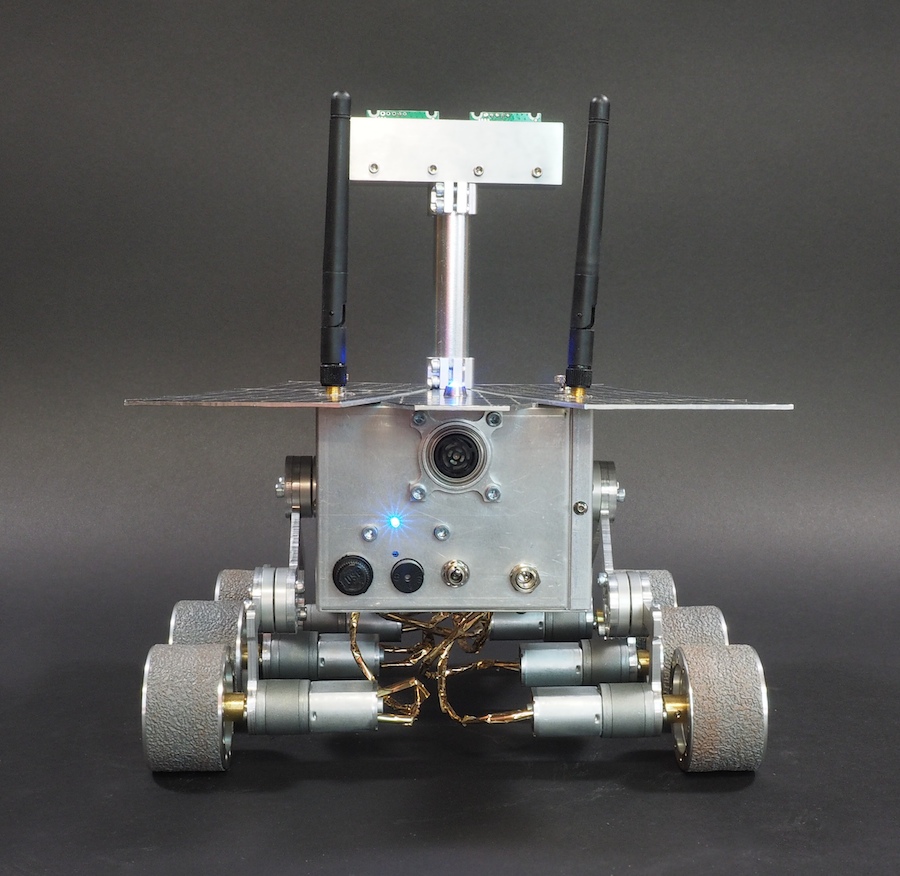
This is the back of the robot, where you can see the sonar, battery alarm LED, battery alarm speaker, charge jack, main power switch, and fuse.
We would like to thank our contacts in Malaysia for their excellent work on this project so far. They have been very good to work with. We look forward to helping them (from a distance) to get their robots setup and working at their location. We would also like to thank our part suppliers from servocity.com (hardware components), sparkfun.com (electronics), pololu.com (motors), dimensionengineering.com (motor controller), maxbotix.com (sonars), robotshop.com (electronics), all-battery.com, and mcmaster.com (metal and hardware), to name a few.
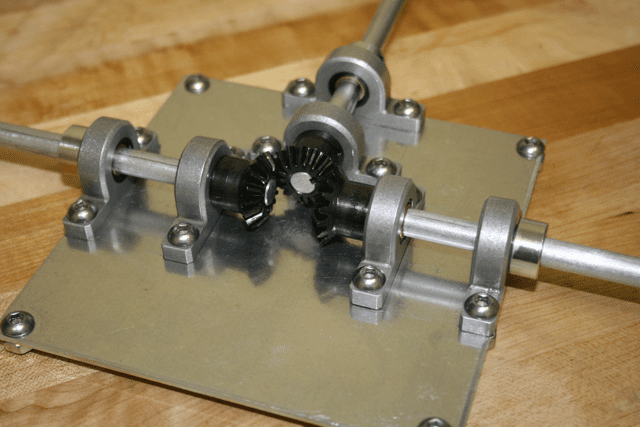
Back in November of 2011 we posted an article about our first Spirit II Mars Rover. Among other things, that rover included a counter-rotating differential (or universal joint) integrated into its rocker-bogie suspension system. If the front wheel on the left side of the rover went upward over a large obstacle, then the differential would push the three wheels on the right side downward, and vice versa. Its purpose was to stabilize the rover when traversing rough terrain. We made that first counter-rotating differential from bevel gears, aluminum rods, aluminum plates, and screws. Its shafts were connected to each side of the rocker-bogie suspension system. The function was simple: If either of the shafts rotated, then it caused the other shaft to rotate in the opposite direction. Our original version worked quite well, but it was also large, bulky, and a bit difficult to keep running smoothly.
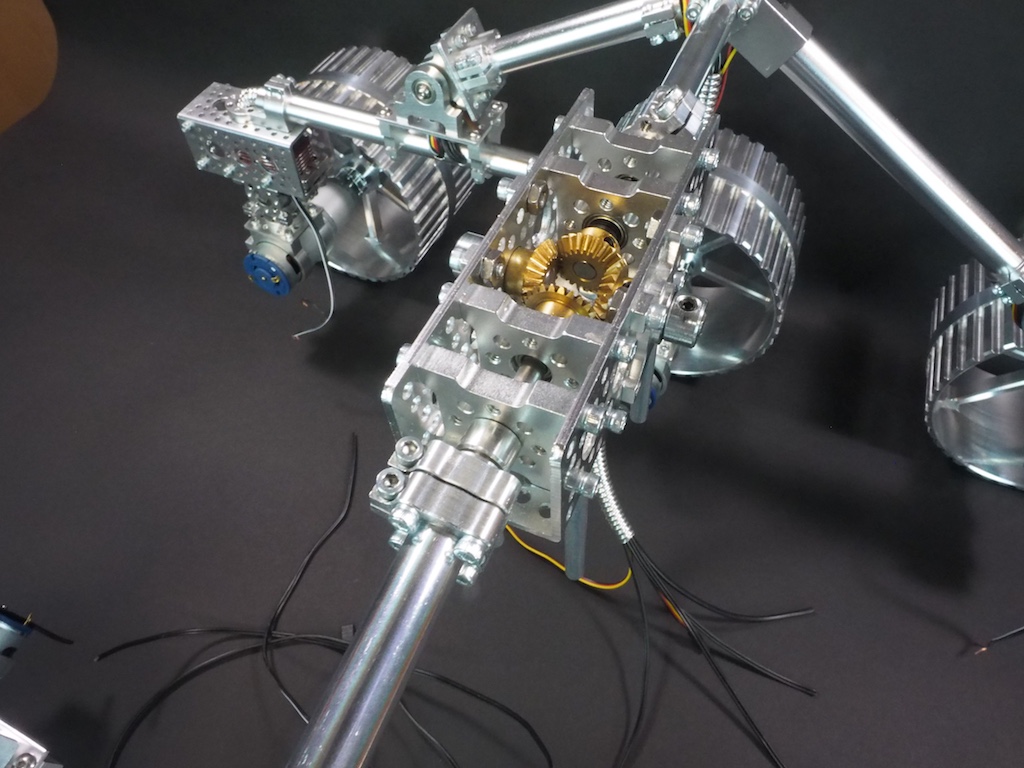
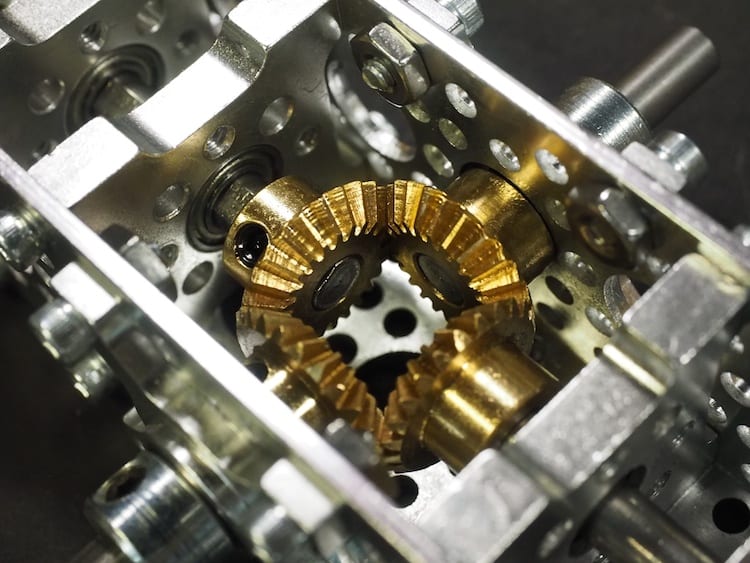
Recently, our friends at Actobotics / ServoCity sent us a couple of their new bevel gears to try out. It’s cool how a few new parts can fire up your imagination and get you thinking. We decided to see if we could create a new counter-rotating differential for a future Mars Rover project. We were very pleased with the results. The new differential is much smaller than the old version, so it will fit nicely inside the box of a Mars Rover, and its operation is smooth and robust. Camille took all the photos of the new differential.
THE NEW COUNTER-ROTATING DIFFERENTIAL
CLOSE-UP OF THE NEW COUNTER-ROTATING DIFFERENTIAL
CAMILLE’S ARTISTIC BACK-LIT SHOT OF THE COUNTER-ROTATING DIFFERENTIAL
OUR ORIGINAL COUNTER-ROTATING DIFFERENTIAL
THE ORIGINAL DIFFERENTIAL IN THE PARTIALLY COMPLETED SPIRIT II MARS ROVER. ONLY THE LEFT-SIDE WHEELS ARE IN PLACE.