by Camille | Robots, Workshop Blog
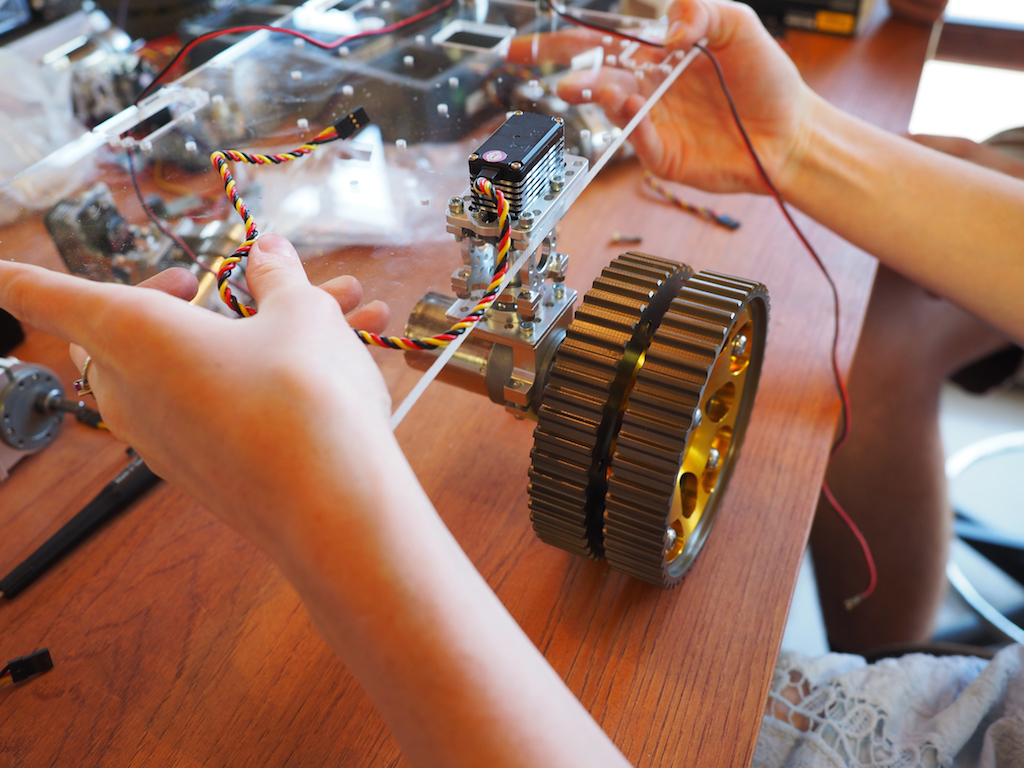
We have taken on a new project to build a compact rover for the New York Hall of Science, something that visitors can drive around in the corridors of the Science Center and that the staff can easily take to off-site activities such as schools and children’s hospitals. The design and construction is well under way. We are also happy to announce that we have a new member at Beatty Robotics. His name is Camille McCollough. He’s a junior at Carolina Day School, where he is taking robotics classes, as well as physics, math, and other curriculum. He has joined our team to learn, gain experience, and lend a hand. Here is Camille building the robot’s pan-tilt turret from Actobotics parts, including a servo, gearbox, and gears:
Camille and Camille working on the assembly of the robot’s front LED “head lights”:

Camille working on the assembly of the sonar mounts, while Camille works on the pan-tilt turret:

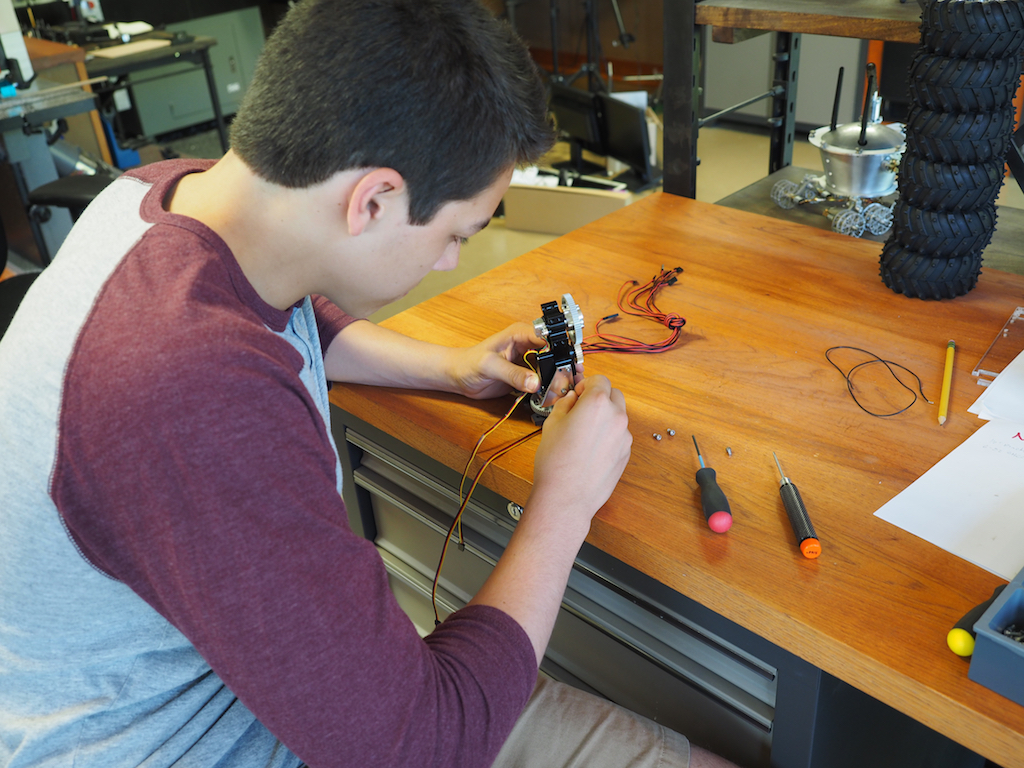
Camille building the first of the six steering assemblies, each of which consists of a servo, servo block, motor, hub, and wheel. We are using a combination of Actobotics parts and our own parts that we made on the CNC.

Camille tests the design and assembly of the first steering servo and wheel.
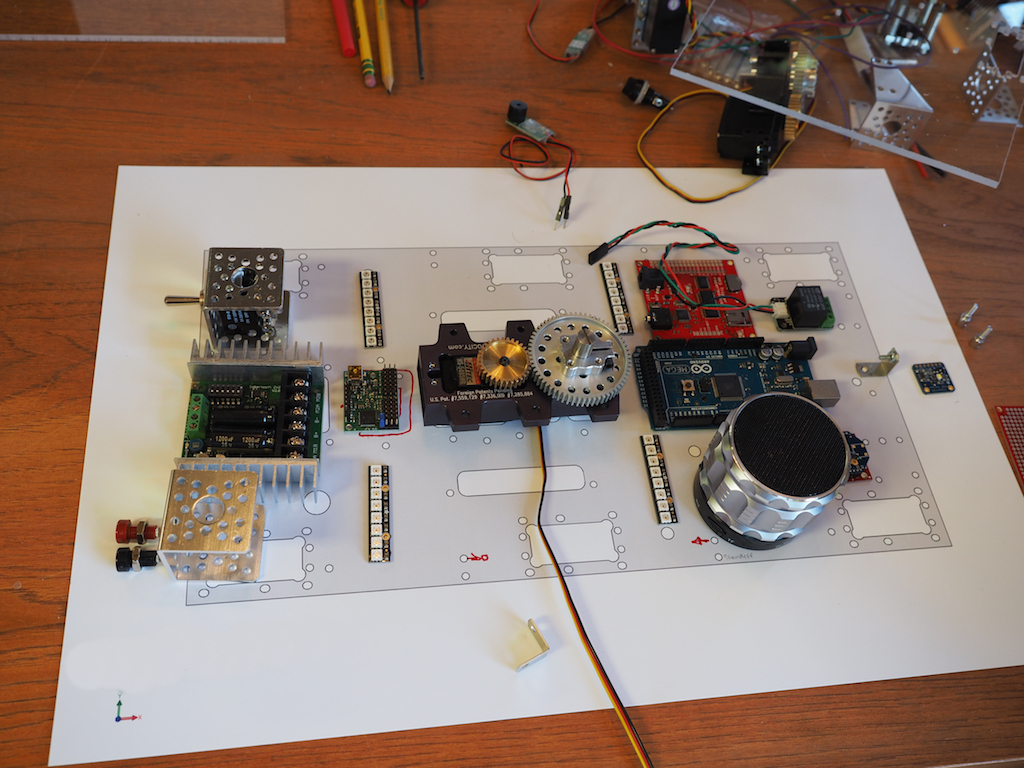
We use a scale drawing of the master plate to plan out where all the components are going to be positioned.
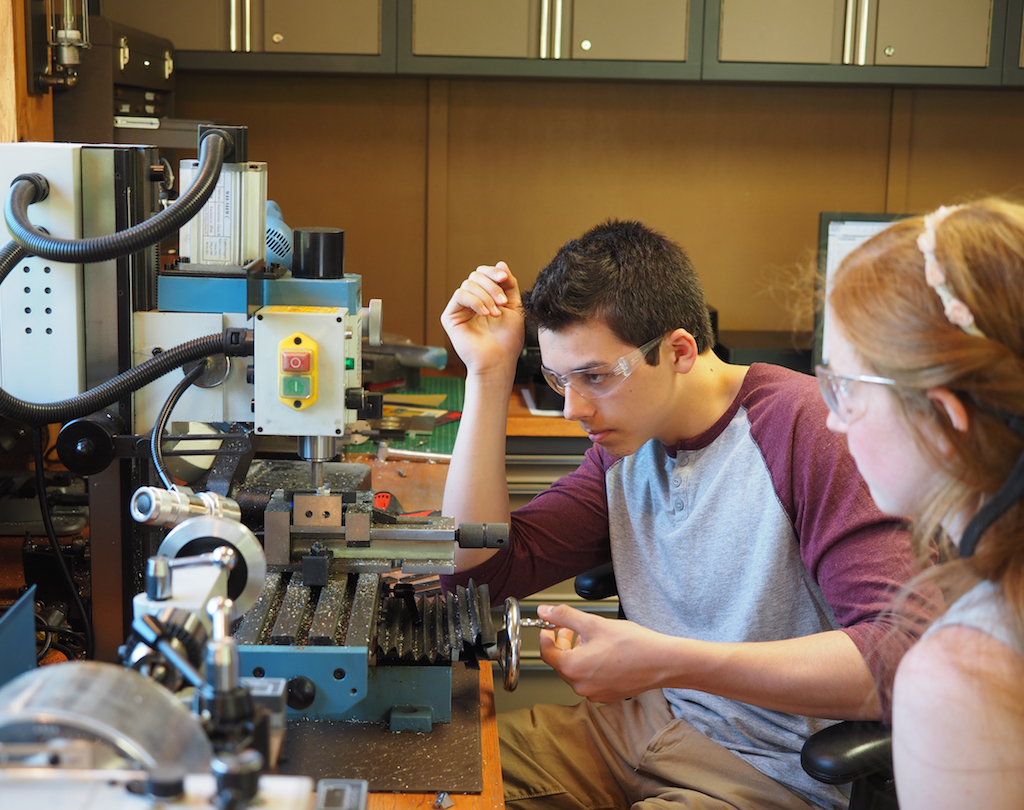
Camille shows Camille how to machine a part of the vertical mill.

Camille machines the next part on the vertical mill.
by Camille | Robots, Workshop Blog
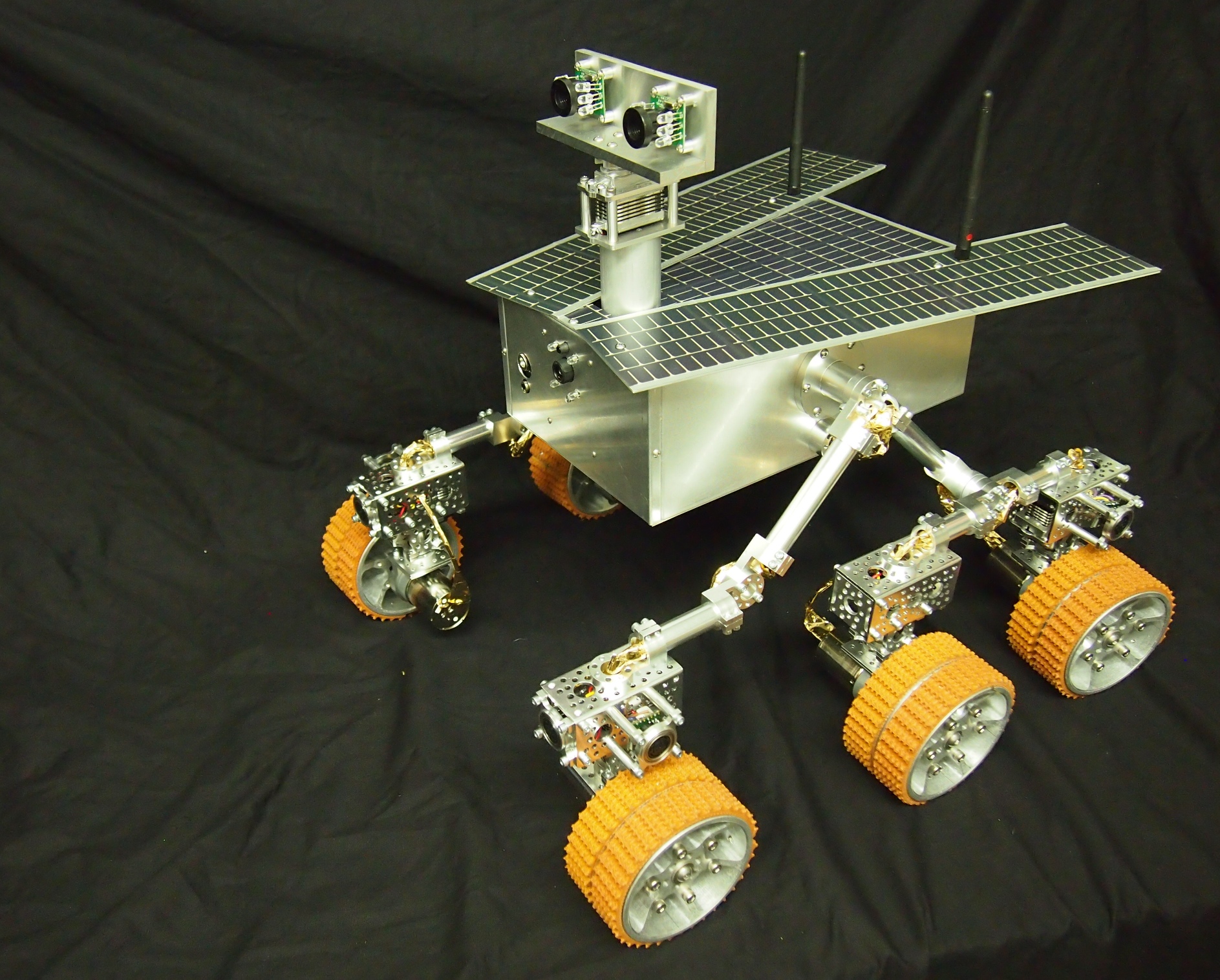
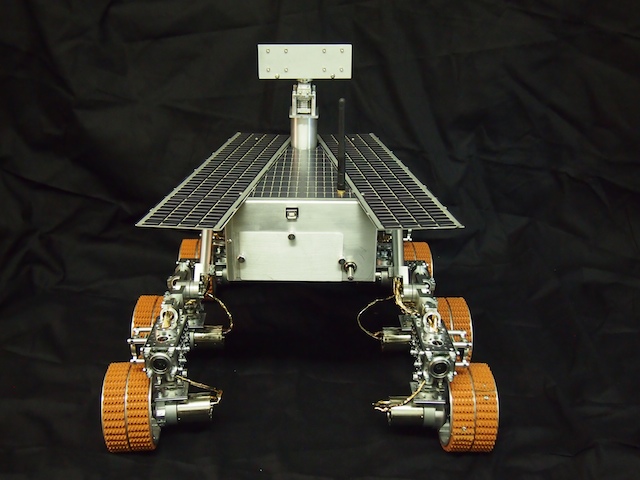
We have exciting news to share. A short time ago the New York Hall of Science contacted us. They have a large and beautiful Mars exhibit, but their existing robot is outdated and needs to be replaced. After some discussion about their requirements, we agreed to build them a new fully-functional Mars Rover robot for their exhibit. You may have noticed that we’ve been chronicling our work on the new rover in our Workshop Blog for the last several weeks. We have done most of the metal machining, mechanical assembly, electrical soldering, electronics wiring, and other work on the project. They will also be part of the on-site testing and installation in New York. Update: We installed the Mars Rover at the New York Hall of Science on June 8, 2013. It has been a great success so far. It has become the science center’s most popular exhibit.
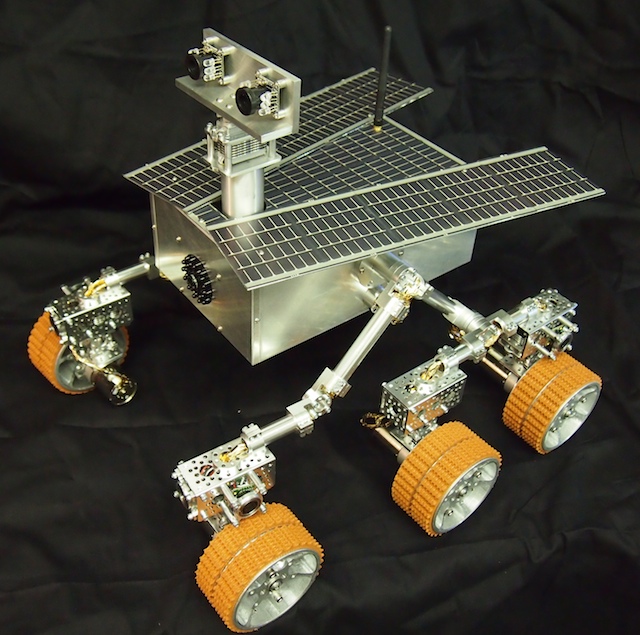
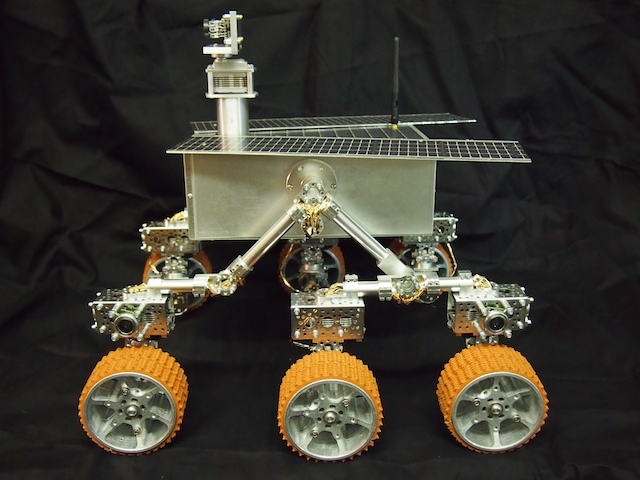
The Mars Rover is constructed of over 700 electrical components, aluminum parts, and other pieces that we purchase, make by hand, and/or machine on our homemade CNC Mill. In addition to the NASA-style six-wheeled rocker-bogie suspension system and the solar panels, the new Mars Rover is equipped with an infrared camera, a thermal array sensor, eight sonar sensors, and other technology. Using special control software that we will provide, kids and other visitors to the center will drive the Mars Rover remotely through the exhibit’s Mars-scape on a mission to find infrared-emitting rocks that may provide evidence of past life on Mars.
With over 450 interactive exhibits, the New York Hall of Science is the largest collection of hands-on science and technology exhibits in the New York City area, and rated as one of the best science centers in the country. They are actively involved in pioneering the Design/Make/Play revolution. Built initially as a pavilion for the 1964 World’s Fair, the New York Hall of Science is not only the region’s premier science museum, it hosts the world-renown New York Maker Faire each fall. We are honored to be working with the NYSCI and we’ve been having great fun (and many hours of hard work) building what we hope will be an excellent robot for them.


OUR POSTS ON THE CONSTRUCTION OF THIS ROBOT:
Our new Mars Rover Arduino Shield
Soldering the Mars Rover Shield
Mars Rover – Adding the Targeting Laser and Thermal Array Sensor
Mars Rover – Mast and Solar Panels
Continued work on the Mars Rover
Mars Rover – Infrared Detection
Making progress on the Mars Rover
Mars Rover – Electronics
Major milestones reached on the Mars Rover
Using CNC to machine the electronics plate for Mars Rover
Cutting metal for the Mars Rover 2
A Counter-rotating Differential
POSTS RELATED TO OUR ORIGINAL PROTOTYPE:
https://beatty-robotics.com/spirit-ii-mars-rover/
Spirit II – Mars Rover: INSIDE VIEW
Solar Power System
Differential for Mars Rover
