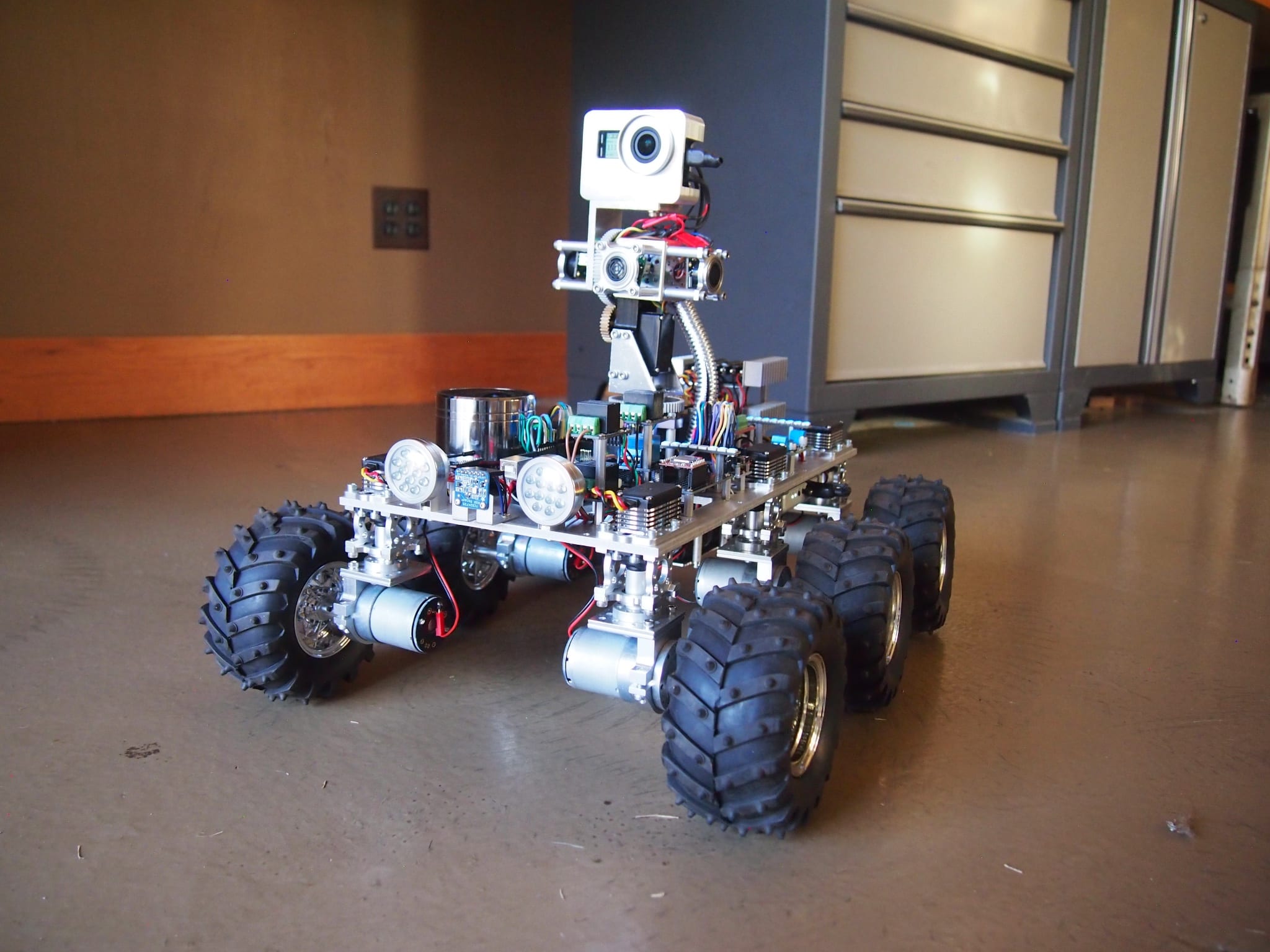
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first...
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first...
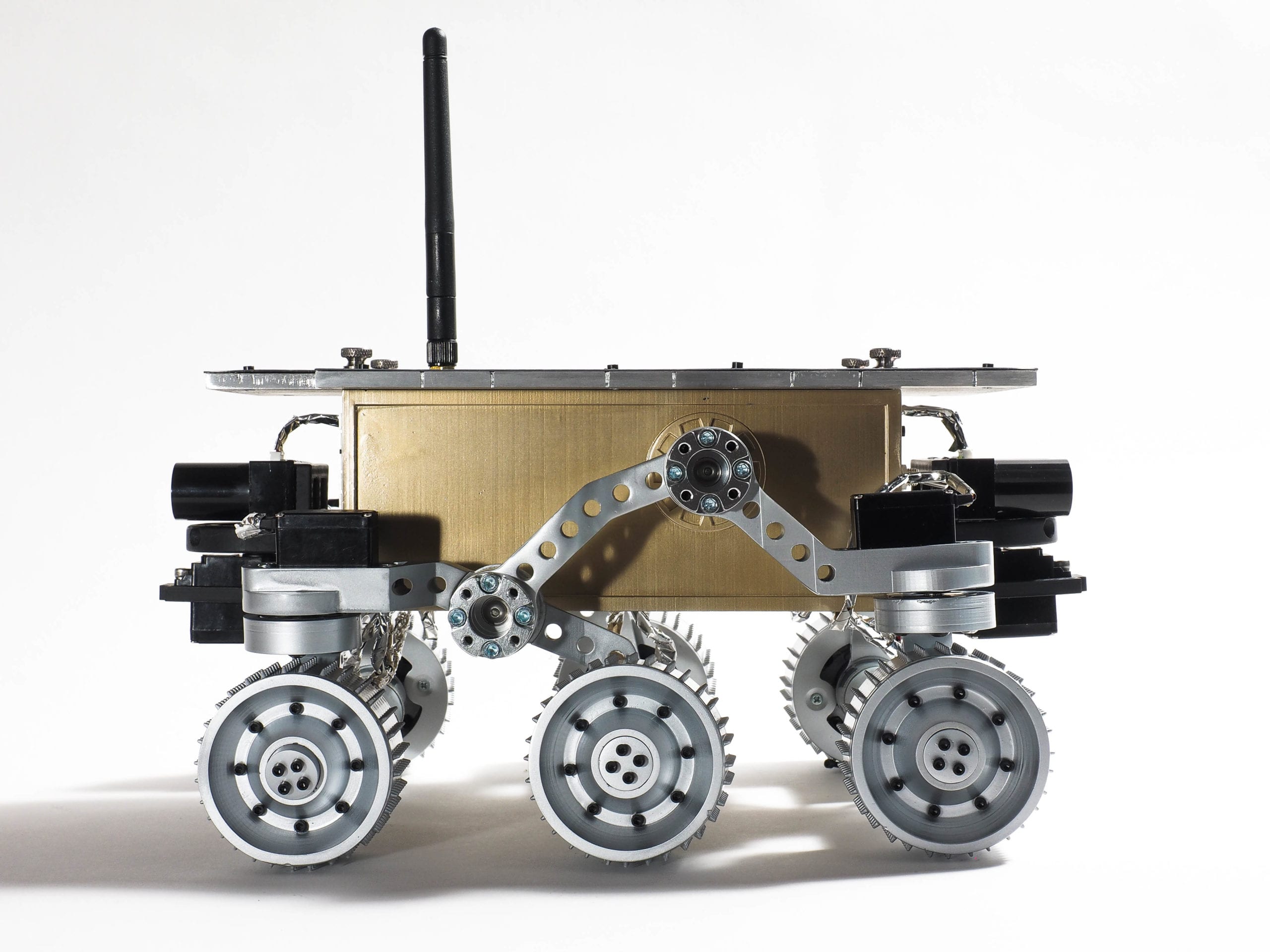
We have built a sturdy but compact 6-wheel-drive (6WD) rover for museum exhibits with limited space. In this video, we...
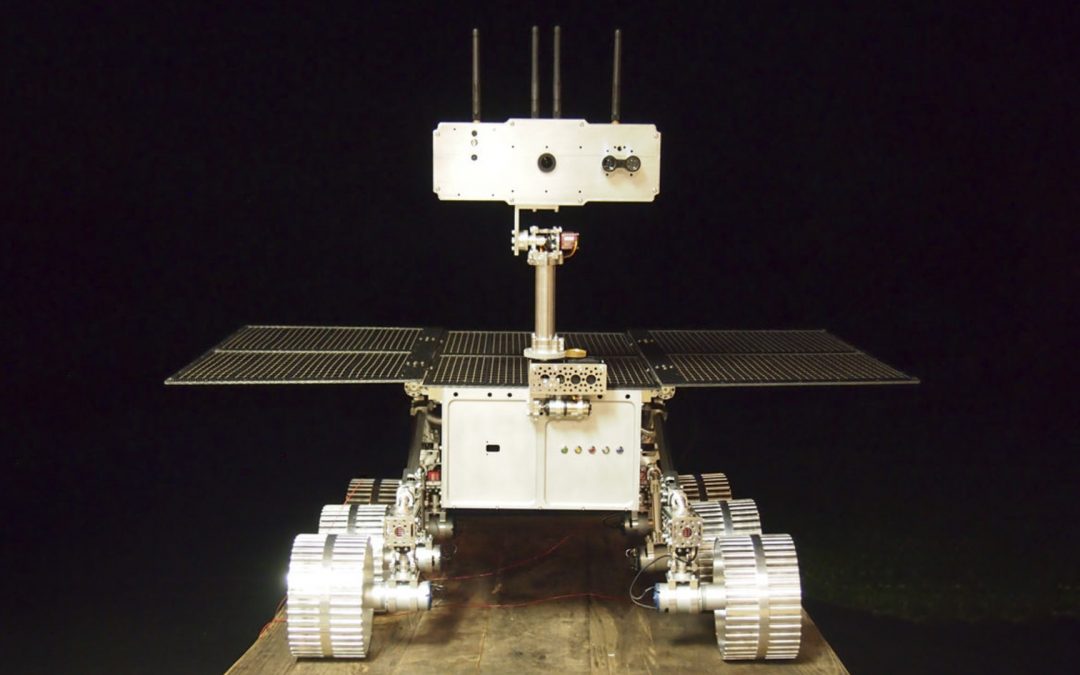
We've been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its...