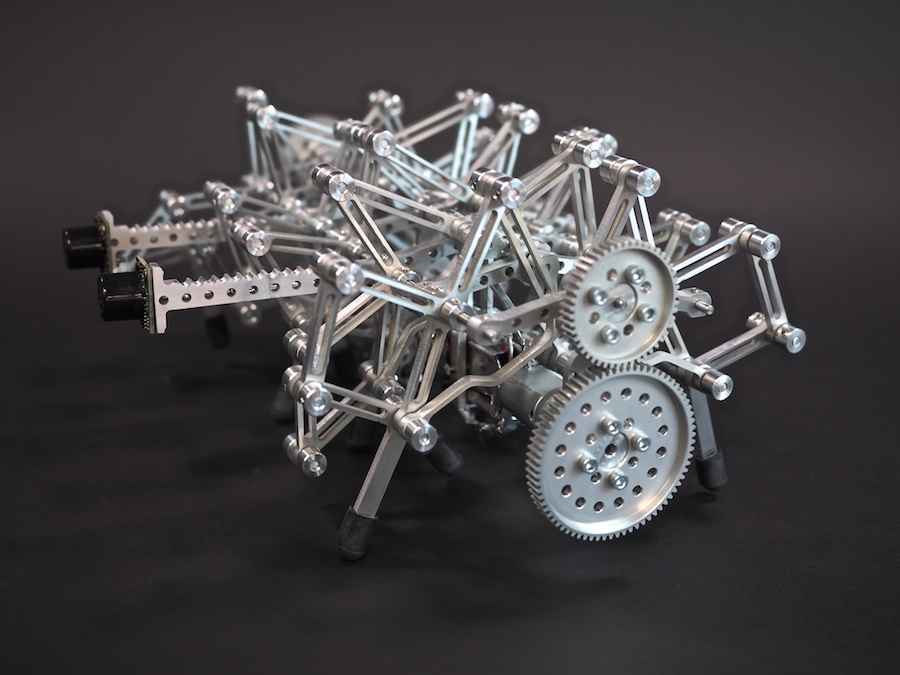
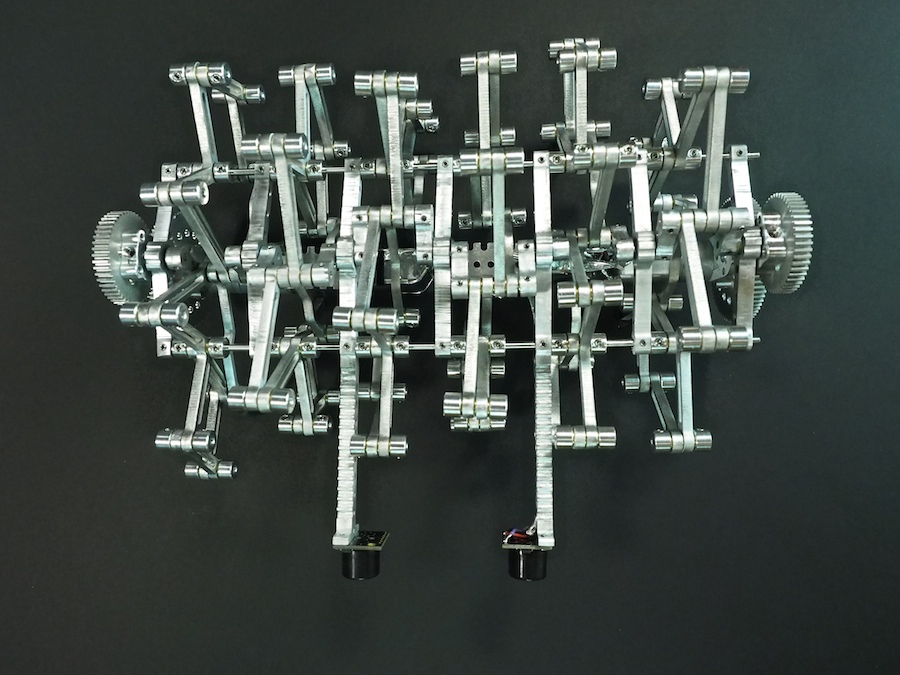
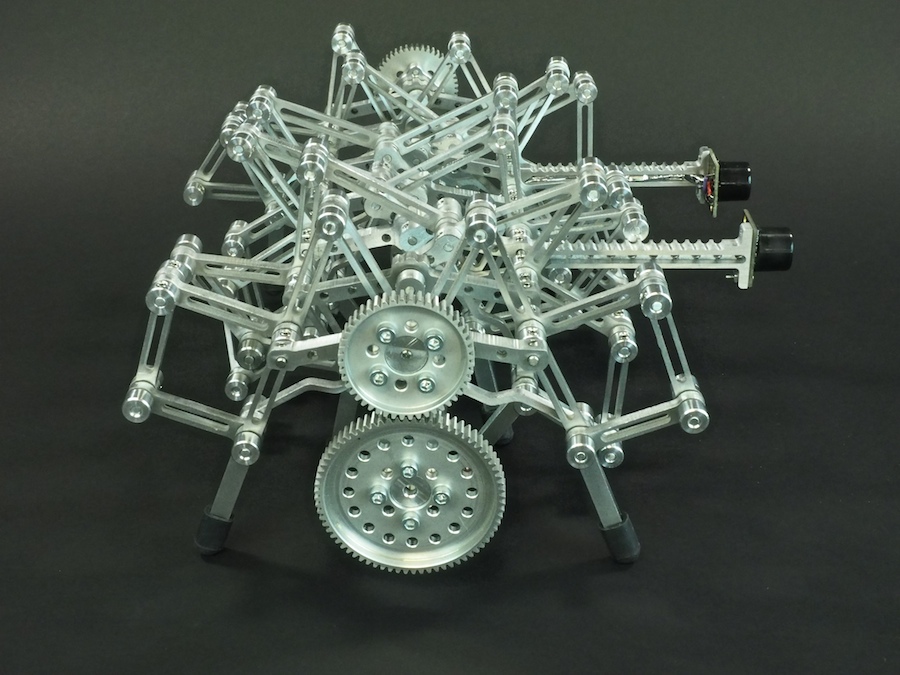
We would like to introduce you to our newest robot. Her name is Alumini, which is pronounced Ah-lu-min-ee. She’s a 12-legged running creature. She’s made out of custom, CNC-machined aluminum components designed to be like vertebrae and bones in keeping with the idea that is a creature not just a machine. Our goal was to create a little beastie without any visible wires or electronics (other than her sonar eyes). She does not have a box filled with electronics like our other robots. We wanted her to look like she was all legs. This meant we needed to use very small electronic parts and we had to do some very tricky wiring. The soldering on this project proved to be quite a challenge, but we were happy with the end results. Alumini is ten inches wide and consists of over 500 parts. Like her much larger 16-legged predecessor, Aluminalis, she uses gear motors to drive two crankshafts, one for each side. Alumini uses a tiny Arduino Pro Mini 328 microcontroller. She can operate via remote control (using an on-board xbee radio) or autonomously using her sonar eyes.
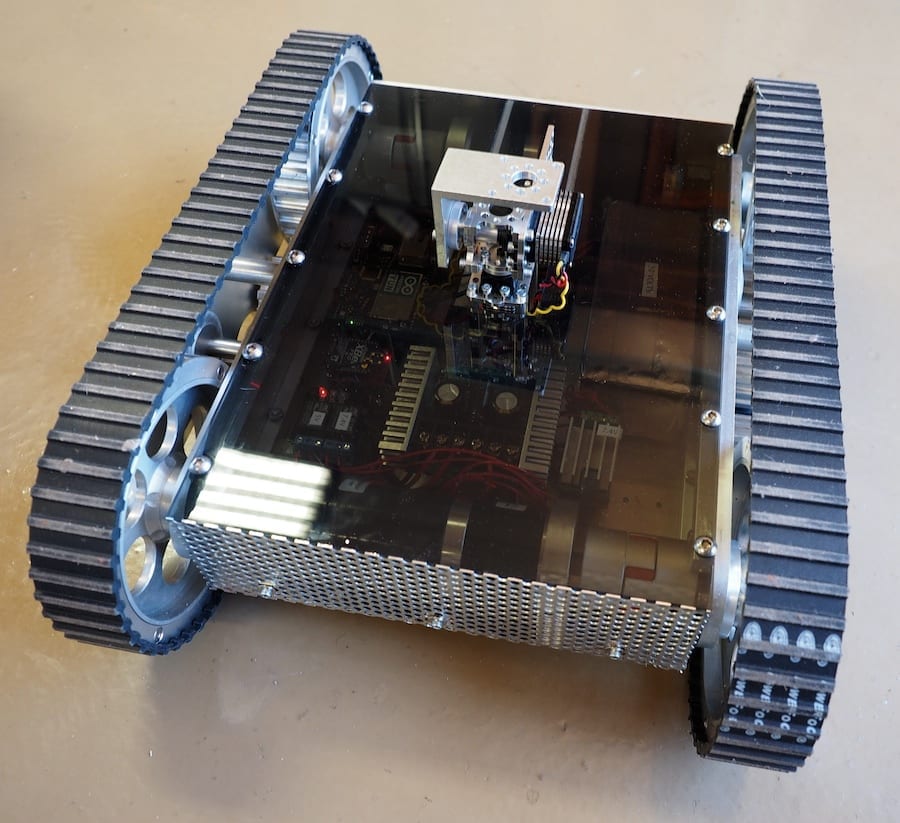
We are working on a tank with treads and a laser cannon gun turret. It’s a complex, long-term project with lots of CNC-machined parts as well a a variety of purchased components, but we’ve been making good progress on it. Today’s posting will focus on the base, which holds the electronics, provides mobility, and establishes a sturdy platform for the gun turret (not shown here).
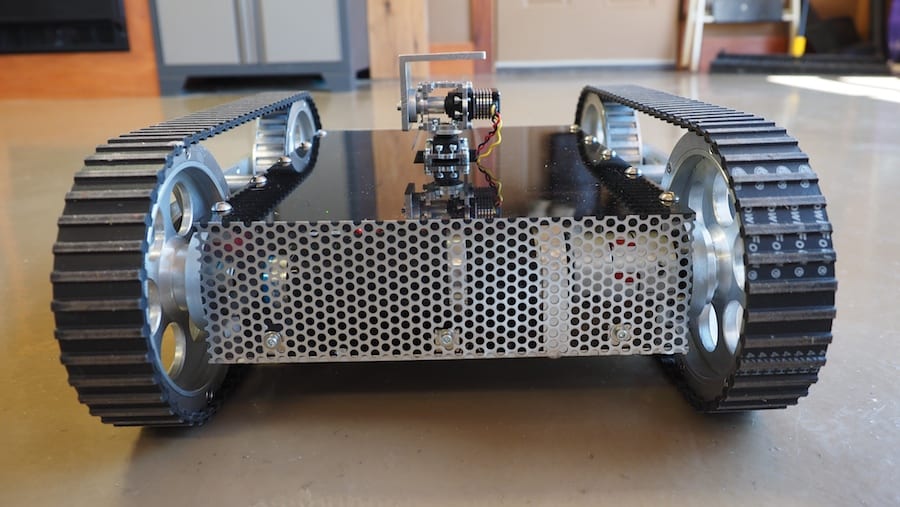
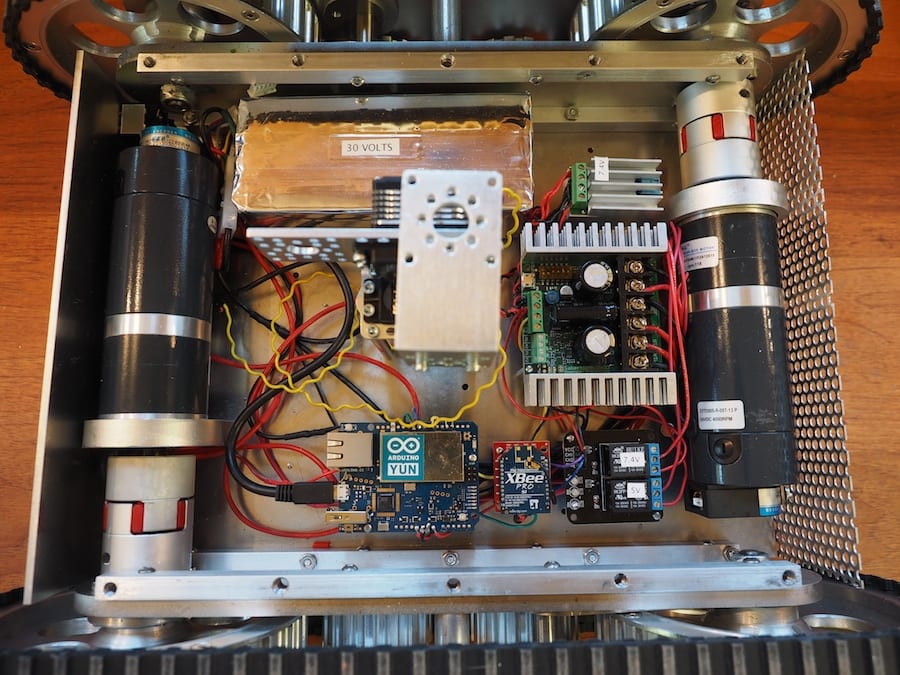
The robot is powered by a large 8-cell 30 Volt LIPO battery, our first ever. So we’ve got lots of power for the motors and the laser cannon. We are driving the wheels (which are actually timing wheels) with two beefy gear motors and a Sabertooth dual 32-Amp Motor Controller. The treads are timing belts. There are two machined aluminum plates (separated by standoffs) on each side that provide the mounting for the wheels. We are using an Arduino Yun for the first time in this robot, which is a new microcontroller that integrates Linux and Arduino into a single board, which among other things, provides for a nice wifi layer, including WiFi-based software updates. We’re using an AnyVolt voltage regulator to bring some of the 30V down to 7.4V for the gun turret servos and the laser cannon. And we have a second voltage regulator for the 5 volt components. The Arduino will trigger relays (shown) to turn on the four targeting lasers and the main laser cannon (not shown), which will laser-burn targets using an autonomous targeting system. This photo also shows the four multi-tapped rails that we made to hold the robot together, including the track sub-assemblies on each side, the bottom plate, and top plate. The front plate and rear plate are held onto the bottom plate with six small #6-32 angle brackets. To better visualize the scale of this robot, the bottom plate is about 10″ wide and 13″ long.
The CNC-machined back plate includes the main power switch, a USB jack for programming (although we’ve been using the Yun Wifi for that), banana plugs for charging, and a fuse.
There are many things we like about this robot so far, but we were especially pleased with the smoke-gray acrylic top that we machined on our CNC. It’s transparent enough to see the circuit board lights on the electronics, but opaque enough to give it a nice blackish sheen. The main top plate is held onto the rails with a bolt pattern of ten 1/4-20 bolts. The difficulty with gun turrets is that you can’t get the top plate off the base without removing the gun turret, which is a pain, so we machined a slot into the main top plate. We didn’t want to use fasteners or a hinge on the acrylic, so we machined mating shelves (grayish area along the edge) so that the small back plate press fits perfectly into the top plate and stays there without needing any fasteners.
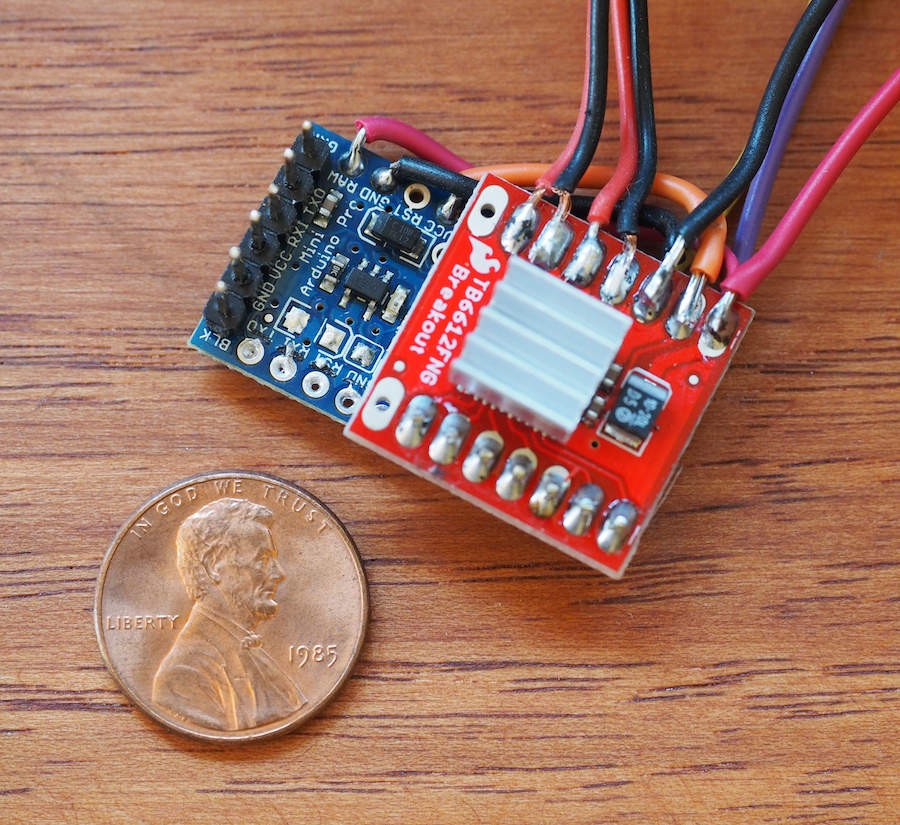
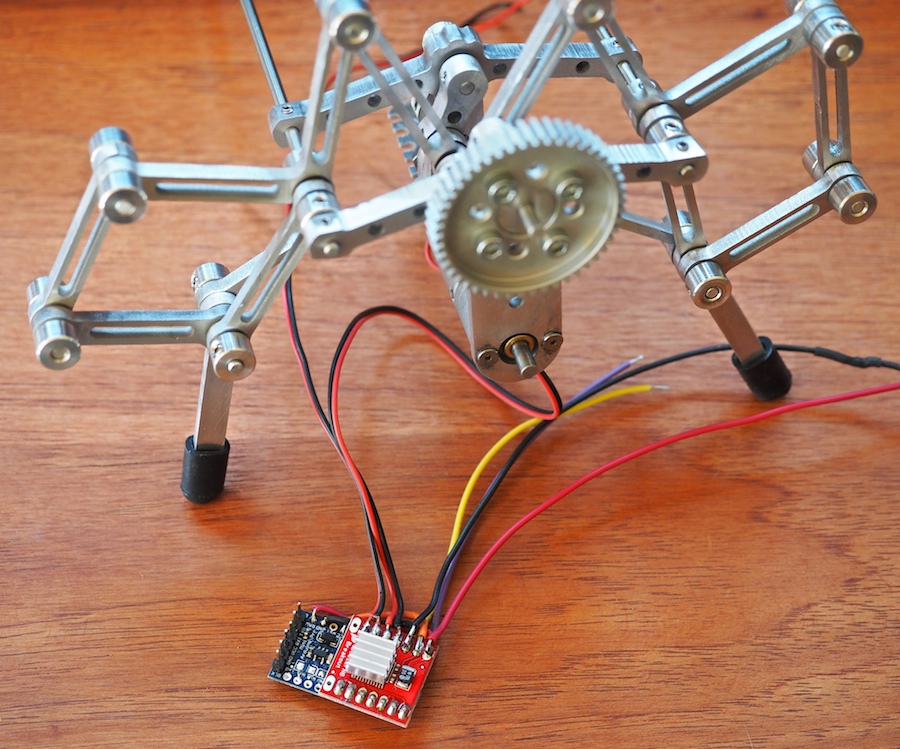
Recently, we encountered a situation where we needed a very small Arduino microcontroller and motor driver. On Alumini, our 12-legged walking robot, there won’t be an electronics box, so we will be integrating the electronics into the bones of the creature. Our goal was for the creature to appear to be all legs. So, we needed the electronics to be very small, hidden beneath and between the robot’s many leg linkages. After trying a few experiments with different components and approaches, we’re excited about the approach we came up with. We don’t know whether it’s going to work in the final robot yet, which is still under construction, but so far it seems promising. The Arduino Pro Mini board from Sparkfun is just 0.7″ x 1.3″ and it’s on a 0.032″ thick circuit board, so it’s a very small, thin little microcontroller indeed. We love the form factor. If it works on this project, it may just become our “go-to” microcontroller for small projects. We also decided to try Sparkfun’s tiny 1A Motor Driver, which is only .8″ x .8″ square.
Genevieve and I soldered up the boards and they’re working well so far, but the one negative we’ve encountered is that the motor driver is a very simple little thing. It’s basically just a breakout board for the TB661FNG chip, so it doesn’t have a lot of on-board smarts. Instead of a single TTL serial wire like we’re used to, it requires 2 PWM pins and 5 digital pins to control it. We don’t have a lot of room for wires, so we did something we thought was really cool: we sandwiched the boards together and turned the motor driver into a tiny make-shift shield for the Pro Mini board. We lined up the pins just right, wrote the software to correspond to those pins, and literally soldered the boards together, which eliminated the need for the 7 control wires. We thought there was a fair chance we would ruin the two boards, but it worked like a charm. In the photo, the seven solder points near the penny (on the red board) are the control pins between the arduino and the motor driver. The other wires (at the top of the photo) go to the 11.1V LIPO battery, motors, sonar sensors, xbee radio, and other components of the robot.
The next big question is whether this little motor driver, which is rated at 1.2A per channel can handle Alumini’s 20mm x 42mm metal gearmotors, which are rated for a free-run current of 0.25 Amp and a stall current of 3.3 amps. Normally we would use a 5A motor controller for these motors, but the 5A motor controller was too large to fit on Alumini’s delicate frame. Once we had soldered our mini robot control system together, we were able to do some testing. When we run the partially-completed Alumini robot on the bench, the motors are pulling .6 Amp each, but they don’t have much force on them yet. We’ll see how this goes once we get Alumini scuttling at high speed around the room. We may end up smoking the motor driver and going back to the drawing board. We thermal-pasted a tiny aluminum heat fin to the chip to help dissipate the heat. We’ll keep you posted.
If you know of any small microcontrollers and motor drivers that would be good for our purpose, please let us know. We would love to know how you’ve solved these problems on your projects.
We’ve been hard at work on several simultaneous on-going projects, including an upgrade to our large Mars Rover, the building of two new Mini Mars Rovers for two science centers in Kuala Lumpur (The National Science Centre and Petrosains, the Discovery Centre), a large tread-based laser tank (which is super-cool, but we haven’t had a chance to post it yet), and Alumini (our 12-legged walking creature).
Here are some pictures of the ladies at work in the workshop.
JENNIFER INSTALLING THIN FILM SOLAR PANELS ON THE TOP PLATE OF A MINI MARS ROVER WHILE CAMILLE WORKS ON UPGRADING ONE OF THE FULL-SIZE MARS ROVERS
GENEVIEVE BUILDING ONE OF THE MINI MARS ROVERS
CAMILLE WORKING ON THE CAMERAS FOR THE MINI MARS ROVER