by Camille | Robots, Slider, Workshop Blog
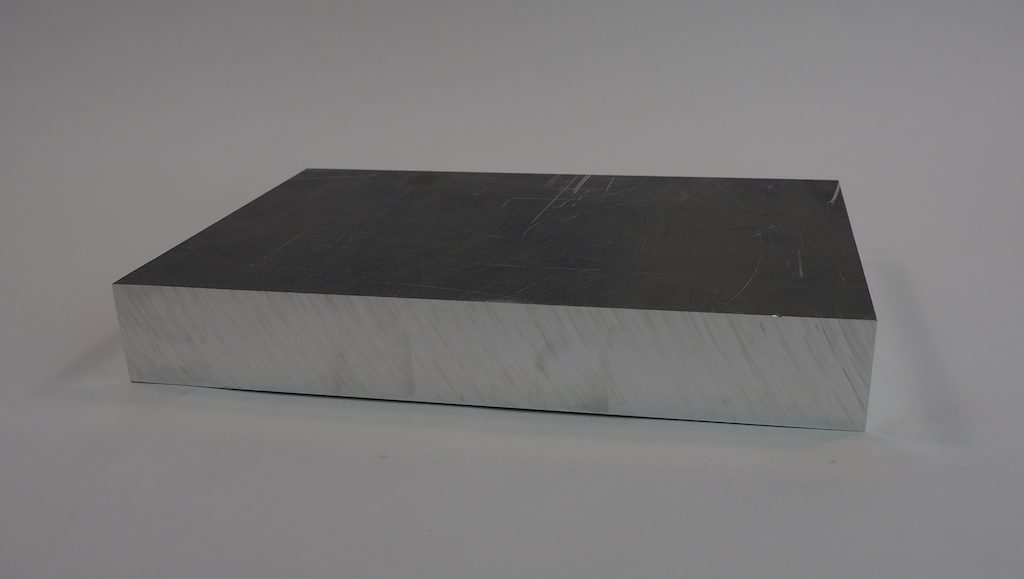
We’ve been working on a fun new robot we call Metalbot. Our goal was to build an autonomous rover with a unibody design that was machined out of a single block of metal. We started with this 13” x 9” x 1.75” block of 6061 aluminum:
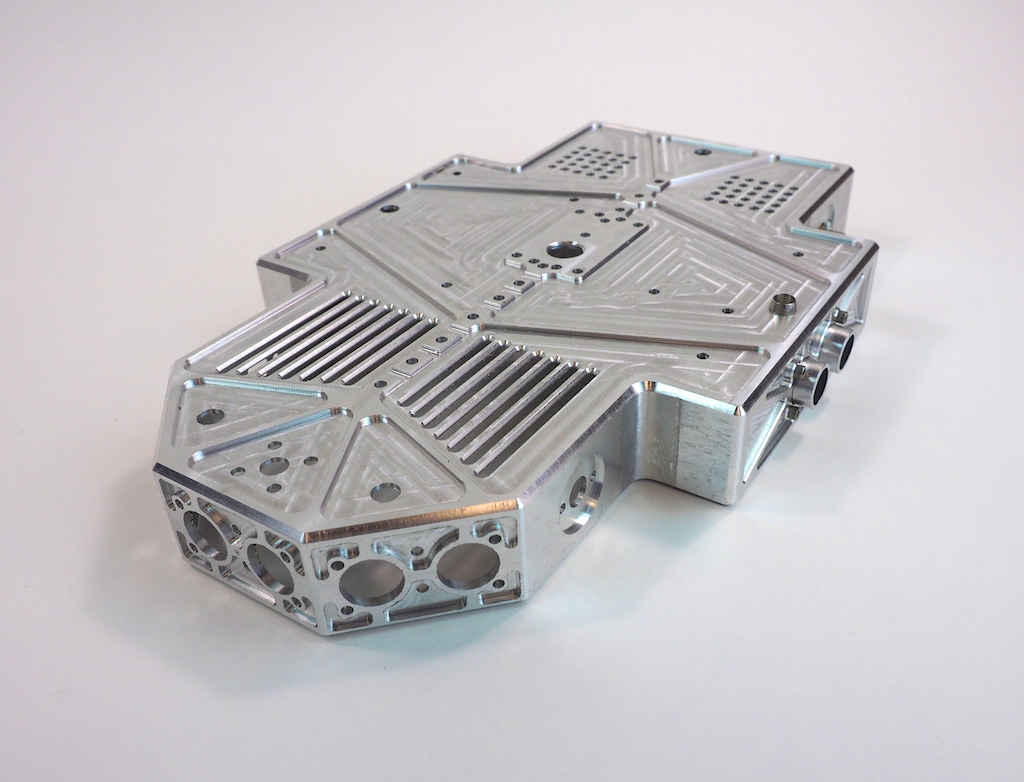
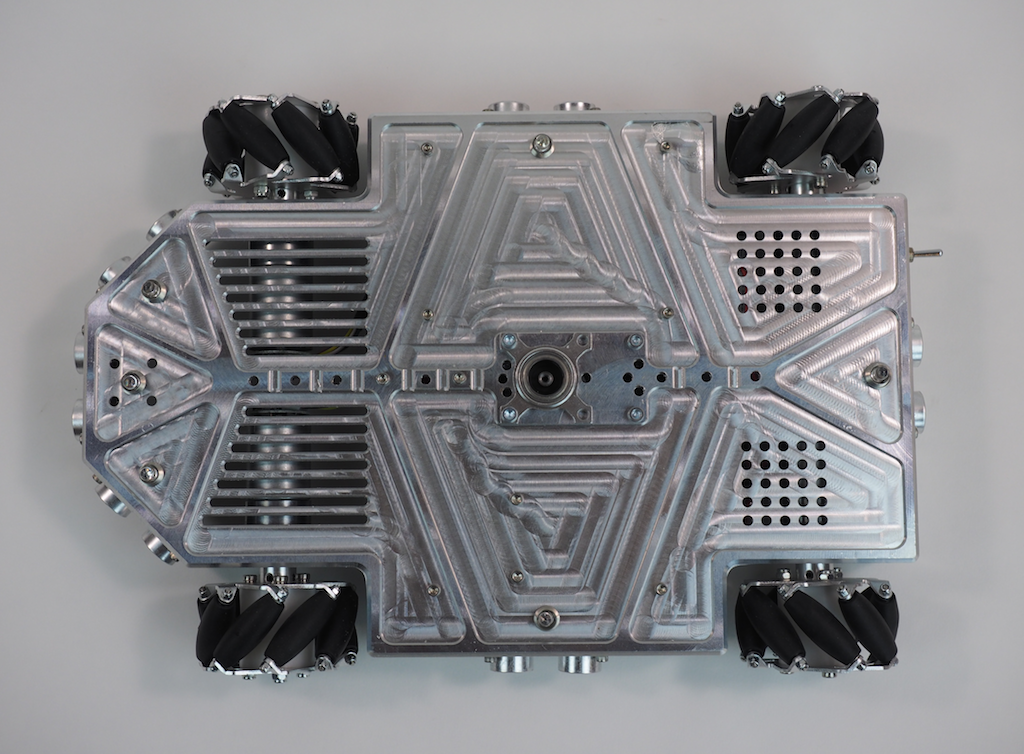
When the machining was done, the robot’s body looked like this. It’s a hollowed-out shell that is about 1/8” thick with holes, slots, and pockets for the motors, LEDs, sensors, and other electronics.
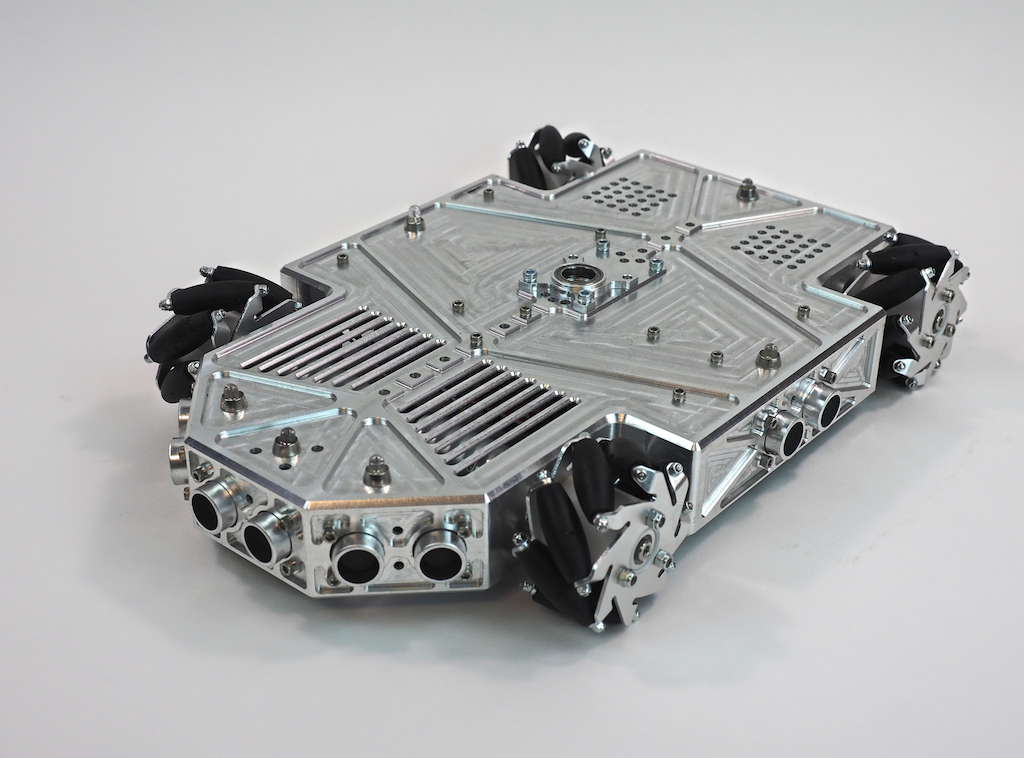
Once Metalbot was assembled with the internal components, it looked like this:
What do you think? We think it’s pretty cool looking. Do you like it?

Work-in-Process Pics
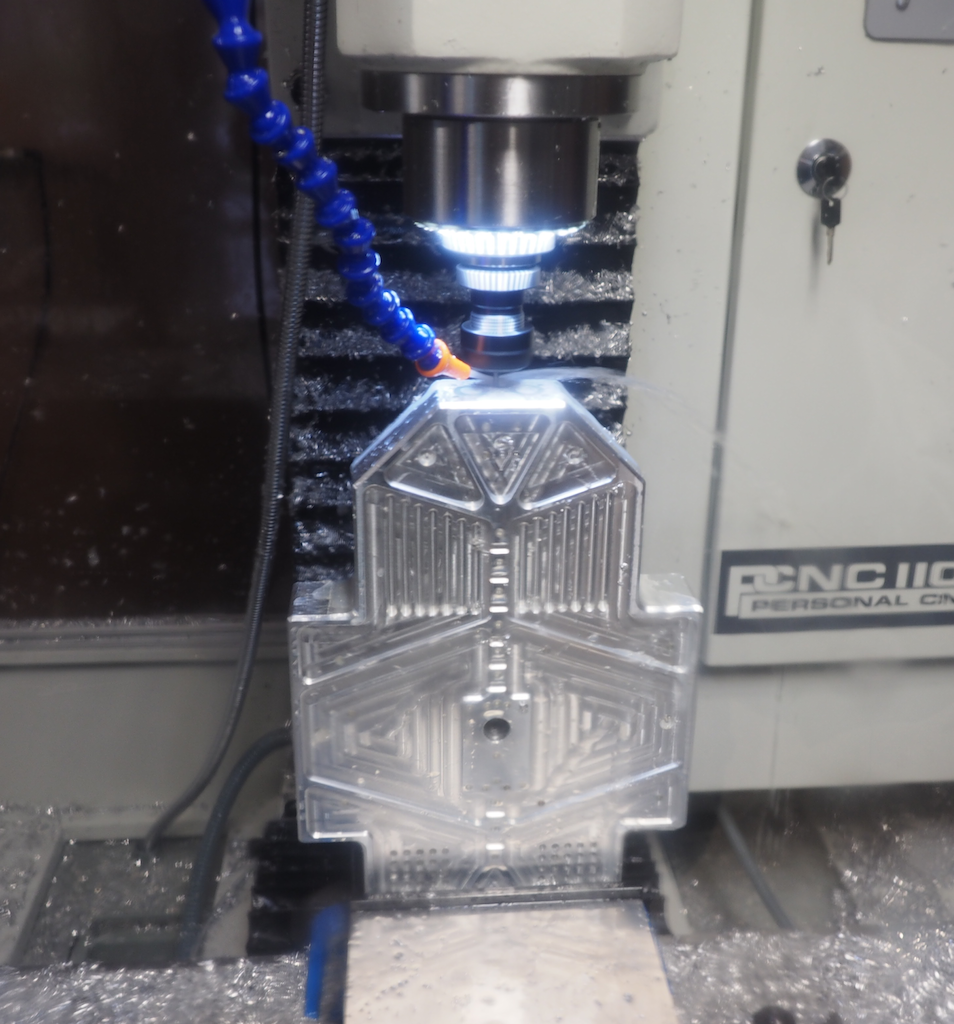
In this first picture (which was taken through the polycarbonate enclosure), we clamped the part vertically in the vise and we’re using an 1/8″ end mill to machine the detail on the front of the nose. In a previous operation we clamped the stock flat and machined the top of the robot, so that work is already done. Because this part has features on every side, machining it required us to clamp the stock in the vise in 8 different orientations: top, left side, right side, back, front, 45-degree left nose, 45-degree right nose, and bottom.
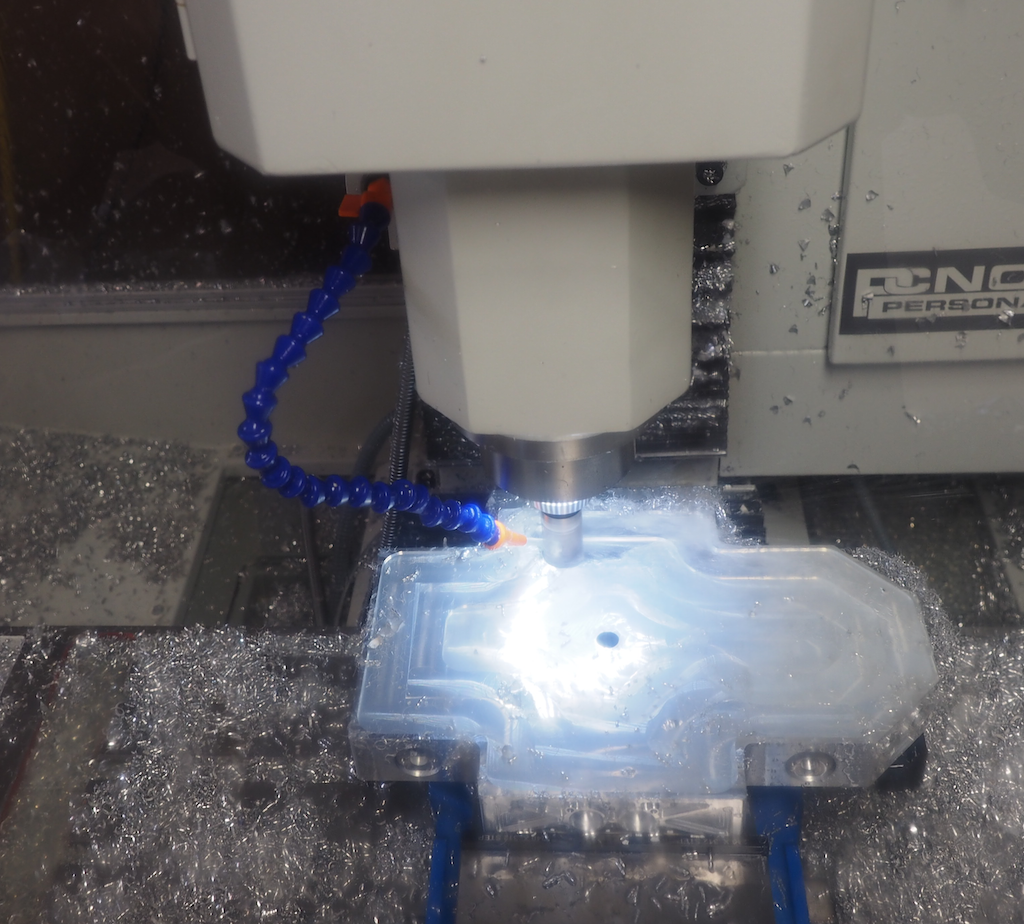
In this next picture, we’re on the last setup, machining out the large pocket on the underside of the robot. This turned the aluminum block into a 1/8” thick shell. The large pocket appears to be glowing because the ring of LEDs we installed around the mill’s spindle are shining into the coolant that has filled the pocket. We’re using a 25mm (.98”) modular end mill here, which is designed to remove material fast. Of course, there were a lot of metal chips, but it’s important to remember that aluminum is easy and efficient to recycle.
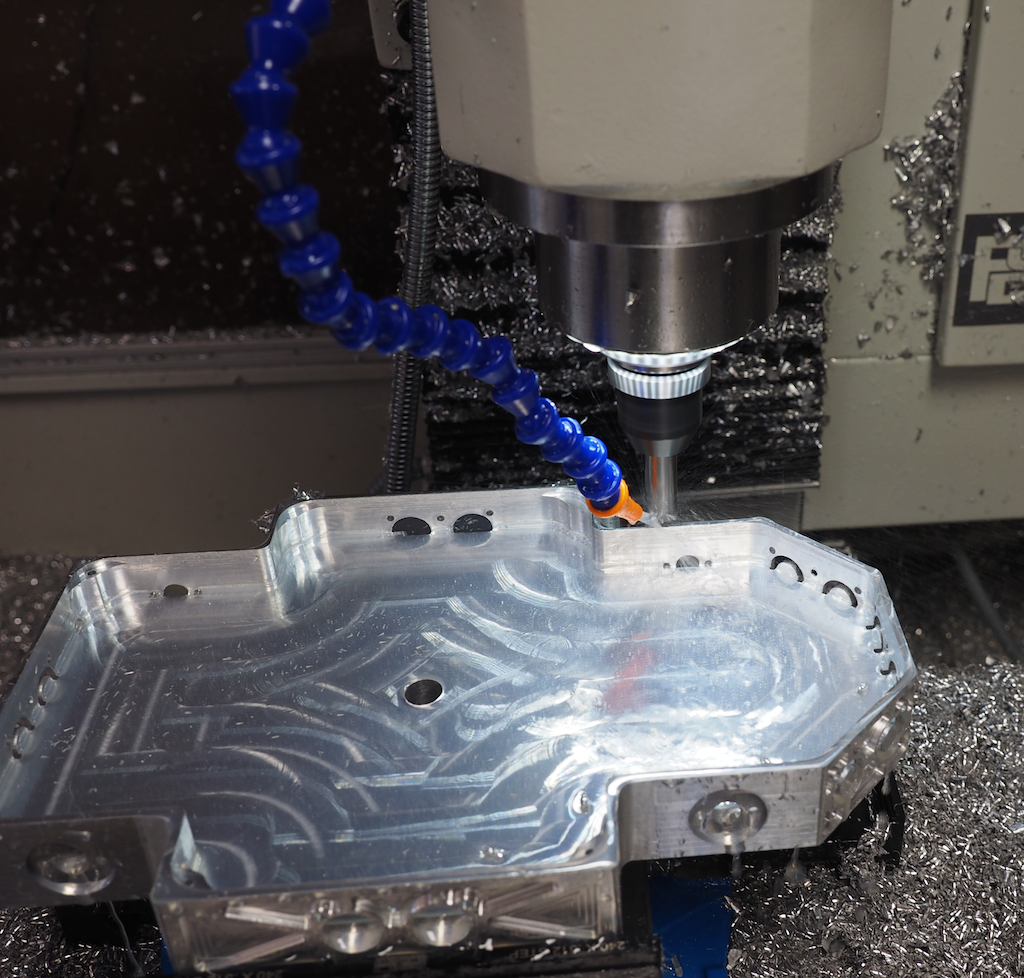
In this picture we’re half way done digging the pocket and we have the machine take a break from the hard work to chamfer the outside contour:
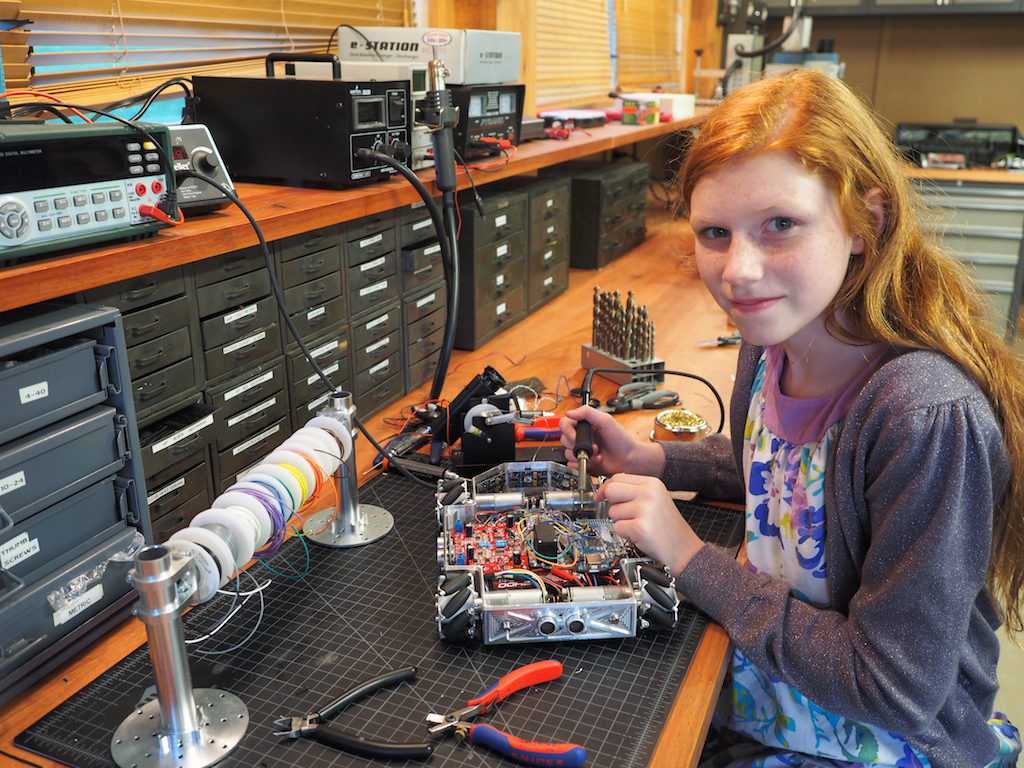
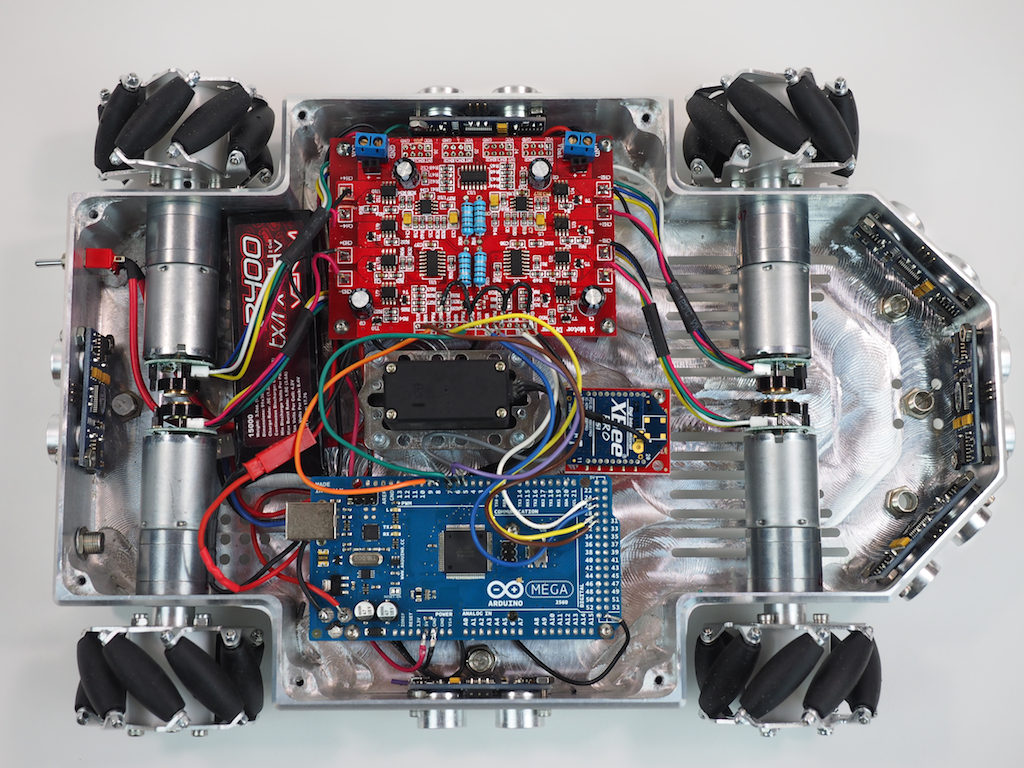
Once the body is machined, we screwed in the wheels, motors, and electronics, which are screwed upside down on the underside, where they are easy to access when the robot is turned over. We will install a bottom plate later.
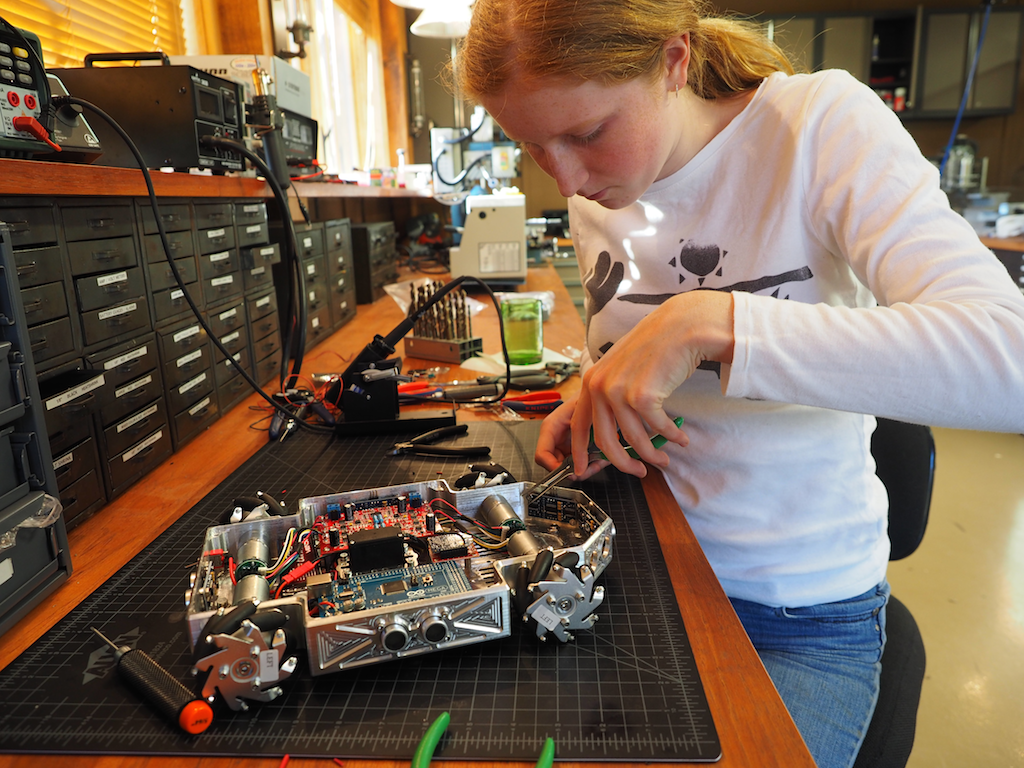
Then we did the wiring and soldering:
Here is the underside of the robot with most of the electronics installed. We’re using an Arduino Mega and a 4-channel Motor Controller, along with 4 Pololu gear motors to drive the mecanum wheels, which will allow the robot to strafe. The robot is also equipped with 6 Ping ultrasonic sensors for autonomous object detection, a LIPO battery, a main power switch, 6 NeoPixel RGB LEDs to indicate the state of each sensor, an Xbee Radio, and a panning servo (black thing in the middle). The robot will also be equipped with an MP3 module and speaker for sound, but those haven’t been installed yet.
The robot’s finished body is 8” wide and 12” long. The rover can be fitted with either the mecanum wheels shown or CNC-machined conventional wheels (not shown). Our original goal was just to machine a cool looking rover out of a single piece of metal, but as we went along, we decided to add some flexibility into the design for future enhancements in case we wanted to do more with it. The robot has been designed with a central spine of holes and ridges for attaching future add-ons, including a servo mounted in the center, which will support a pan-tilt turret for a camera, gun, or arm. We have designed the pan-tilt turret to utilize the Actobotics ecosystem, but other pan-tilt mechanisms could also be used. There are also holes on the front and rear of the top deck that are compatible with the full range of Actobotics components such as brackets, hubs, and channels, which really adds a lot of flexibility.
The next step is to work on the sensors and software programming. With its mecanum wheels, it should be able strafe like a champ very soon.
Here are a few more pictures of Metalbot so far. Let us know what you think. Do you like the overall design?

by Camille | Robots, Slider, Workshop Blog
https://vimeo.com/104241178
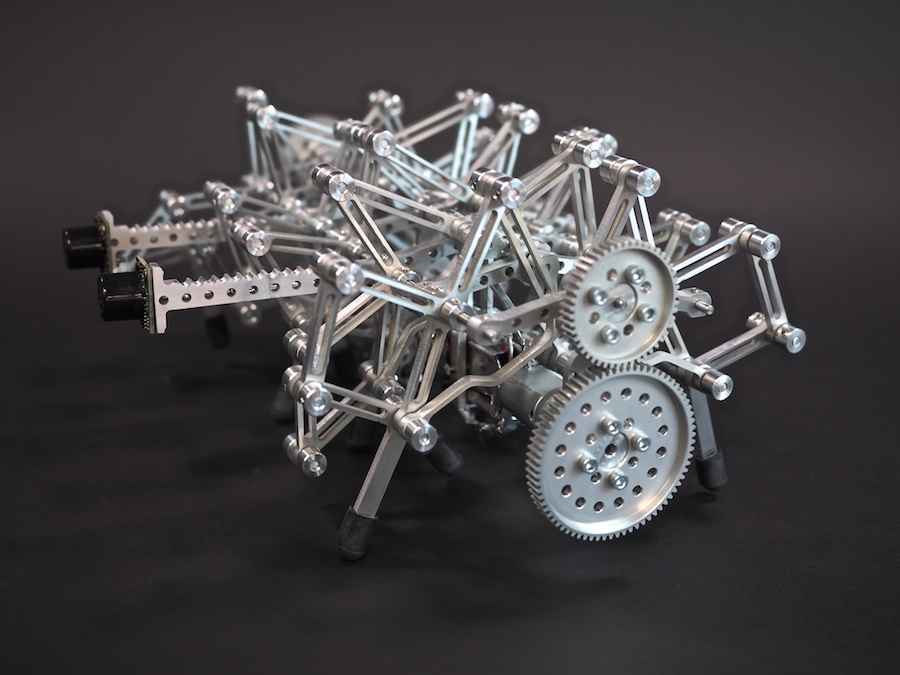
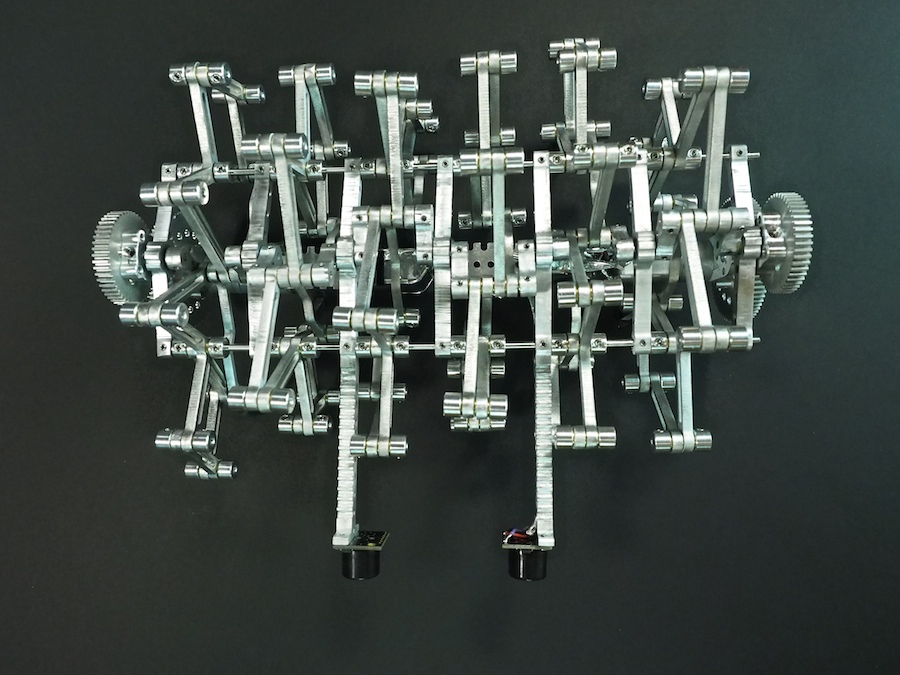
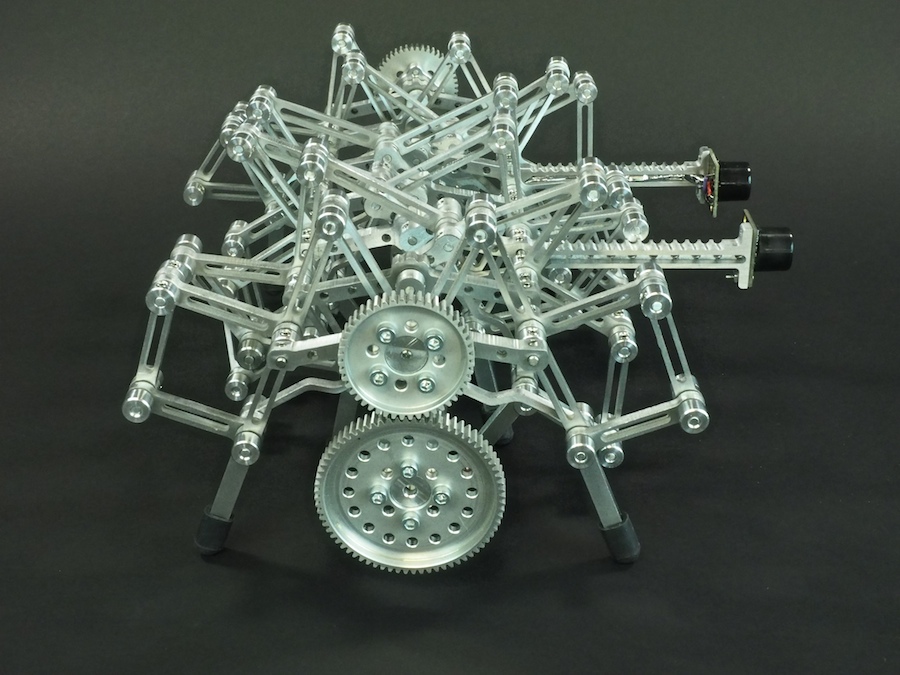
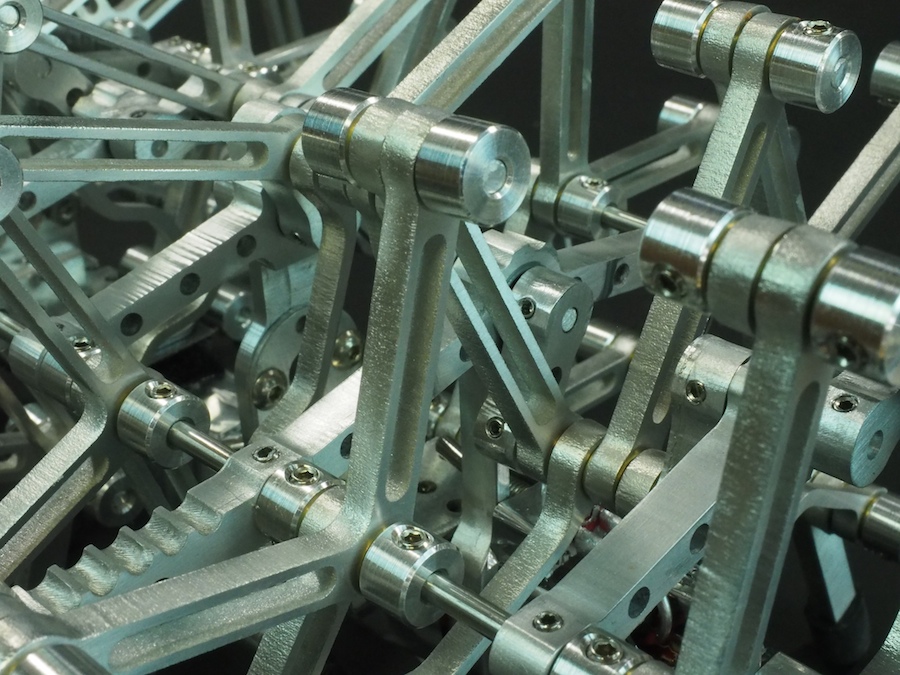
We would like to introduce you to our newest robot. Her name is Alumini, which is pronounced Ah-lu-min-ee. She’s a 12-legged running creature. She’s made out of custom, CNC-machined aluminum components designed to be like vertebrae and bones in keeping with the idea that is a creature not just a machine. Our goal was to create a little beastie without any visible wires or electronics (other than her sonar eyes). She does not have a box filled with electronics like our other robots. We wanted her to look like she was all legs. This meant we needed to use very small electronic parts and we had to do some very tricky wiring. The soldering on this project proved to be quite a challenge, but we were happy with the end results. Alumini is ten inches wide and consists of over 500 parts. Like her much larger 16-legged predecessor, Aluminalis, she uses gear motors to drive two crankshafts, one for each side. Alumini uses a tiny Arduino Pro Mini 328 microcontroller. She can operate via remote control (using an on-board xbee radio) or autonomously using her sonar eyes.

OUR POSTS ON THE CONSTRUCTION OF THIS ROBOT:
Alumini (Baby Aluminalis)
A Miniature Robot Control System
by Camille | Workshop Blog
We are working everyday on the new Mars Rover. The work is going so fast that it’s hard to remember to take pictures, but here are some of the pics we snap along the way.
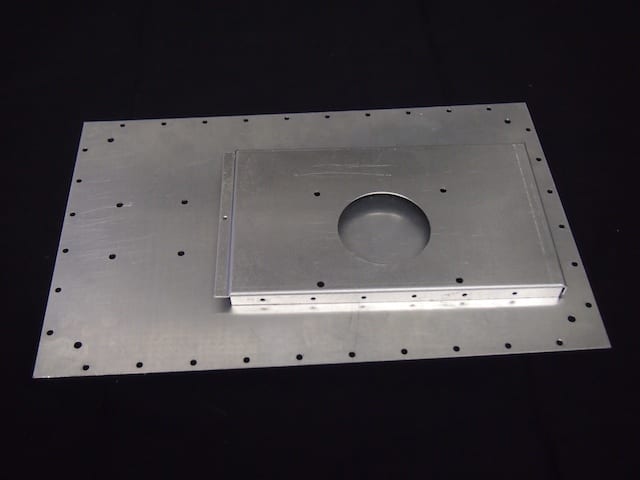
We cut these hole patterns for the Mars Rover’s Front and Bottom Plates using the CNC.
We also used our CNC mill to make this custom Servo Plate for the Mars Rover’s mast. We design all our parts in the SolidWorks CAD system.

There are also times when we need to do it the old fashioned way. Here we are drilling a bracket hole in the Mars Rover mast, which is a 1.5″ aluminum hollow tube.

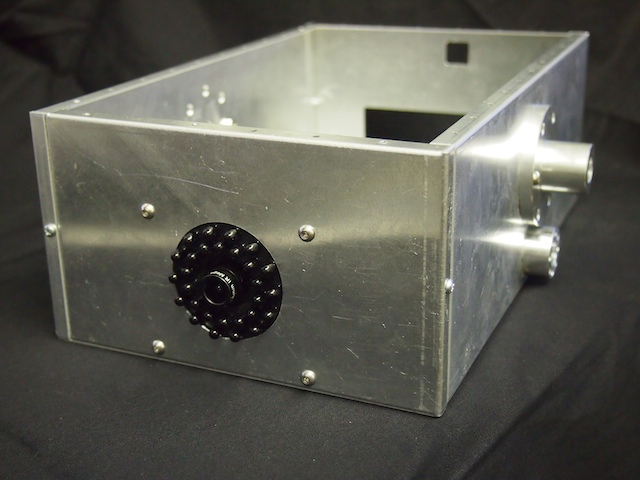
Here is the inside of the assembled Mars Rover box with the camera mounted in the front panel.
Here is the assembled Mars Rover box showing the camera mounted on the front panel. The black protrusions are IR LEDs for night vision capability.

by Camille | Non-Robot Projects, Tools and Workshop, Workshop Blog
Up to this time, we’ve been using hand tools to build our robots. But over the last few months, we’ve been working on building a Computer Numerical Control Machine (CNC) that will allow us to precisely cut, drill, and machine aluminum, brass, plastic, wood, and other materials.
Part of this project is to design and build a custom electronics enclosure that will be a combination computer / CNC / motor control system. This will be the “brain” of the CNC. After trying a few different approaches, we decided to build the box from scratch out of 1/8″ acrylic sheet and Microrax, with are tiny, 10mm 80/20 aluminum beams. The enclosure is about 22″ long, 12″ wide, and 8″ deep. The beauty of Microrax is that we could easily cut the beams to the size we wanted and then use small machine screws and brackets to bolt them together. This allowed us to not only construct the overall enclosure, but to bracket the four cooling fans into place, frame the I/O ports, and add an acrylic lid with hinges. MicroRax is very flexible and cool stuff that I look forward to using for future projects, not only for enclosures, but robots as well.

CNC Electronics Enclosure

On the left side of the enclosure we mounted a mini-ITX motherboard, a small SSD hard drive (not visible in this picture because it’s under the motherboard), the RAM (blue), an internal USB hub, ports for communication with the motor controller, and various other computer components. In the center of the enclosure we installed the main power supply (clear) and the fan control system (black). The right side of the enclosure will contain the motor control boards and other CNC-specific components (which we haven’t installed yet).
There are four main enclosure fans (two on the top and two on the bottom) and four smaller internal fans.

Here is the CNC Electronics Enclosure in the workshop, along with the screen, keyboard, and mouse. We will most likely be mounting the enclosure on the wall so that the lower two fans are more effective.[/caption]

In this close-up, you can see that the fan control system displays the rpm speed of each fan and allows you to adjust it. It also displays the temperature of the corresponding sensor. We’ve attached the sensors to the microprocessor heat sink, the RAM, the motor controllers, and other critical components.[/caption]

Here are various parts for the CNC that we’ve been working on, including the CNC’s aluminum T-Slot table, various fixtures, the largest of the three interchangeable spindles the CNC will use (for 1/4-inch end mills), and a block of blue machinable wax.

Here is a close up of the smallest spindle the CNC will use. This is a high-precision 1/8-inch spindle for delicate work. It will be driven at a spindle speed of 25,000 rpm by the brushed motor via the two black belts, which in turn will be controlled by the motor controller, which in turn will be controlled by the CNC software running on the computer. At least theoretically! Keep your fingers crossed! :)[/caption]

by Camille | Robots, Slider, Workshop Blog
Today, we would like to introduce Terrabot, our Terrain Traveling Robot. Based on a modified “rock crawler” chassis, its primary purpose is to traverse rocks, branches, steep slopes, flower beds, boulders, mountain trails, and other extremely rough terrain.
Terrabot

Terrabot is equipped with 4-wheel steering (4WS). Two high torque servos shift machined aluminum linkages to rotate its front and back wheels independently. Note the navigation GPS on top of the back servo (on the left) and the sensor turret on the front (right). Terrabot’s four wheels are driven by two powerful brushless motors (bright blue) and robust gearboxes (centered in each axle).

Terrabot’s highly-articulated chassis is designed to twist up to 90 degrees as the robot is moving, allowing it to climb over huge boulders and other obstacles. In this picture, the chassis is articulated 45 degrees. Note that the back tires are still on the ground because the center linkages of the bot are twisted.

Terrabot’s topside electronics include a tiny Arduino Nano (lower left), an XBee Radio (right), and a 9-DOF Mongoose Inerntial Measurement Unit (IMU). The IMU measures the degree of tilt and the rate of acceleration in the X, Y, Z planes, which we plan to use for our stabilization algorithm.

Terrabot’s other electronics are stuffed into the little chamber inside the aluminum core (note the blue LED at the bottom of the picture). This includes the two Electronic Speed Controllers for the motors, the Pololu Maeastro motor/servo controller, the power rails, various voltage regulators, and other electronics. The navigation GPS (see the first picture), is mounted on top of the rear servo so that it has a clear view of the sky.

Terrabot Side View, showing the shocks, the frame, and LIPO battery beneath. Note the “roll posts” we installed on the top to protect the topside electronics if Terrabot falls off a rock during a climb and flips over. (We learned this one from experience!)

Terrabot Front View. There are three sonars mounted in the sensor turret, which rotates 270 degrees when the robot “looks around” to determine the best course through obstacle-ridden rough terrain.
