by Camille | Robots, Workshop Blog
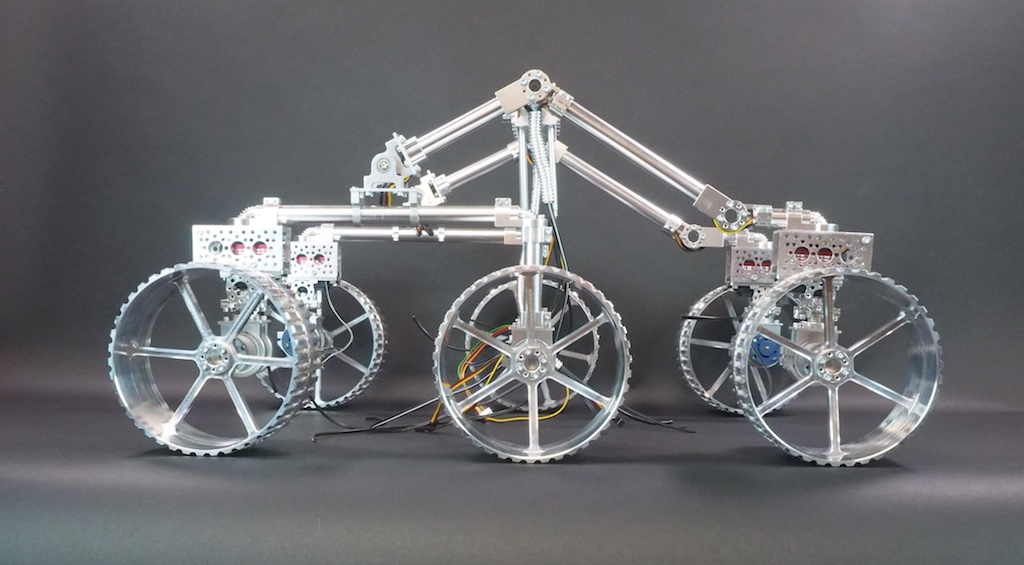
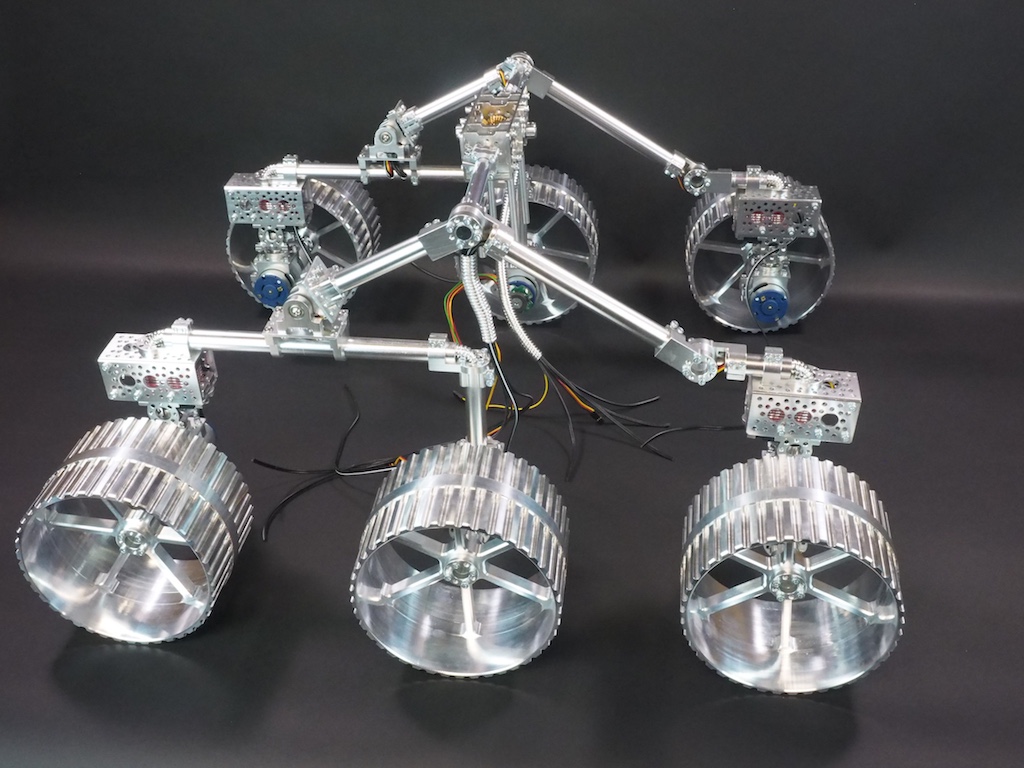
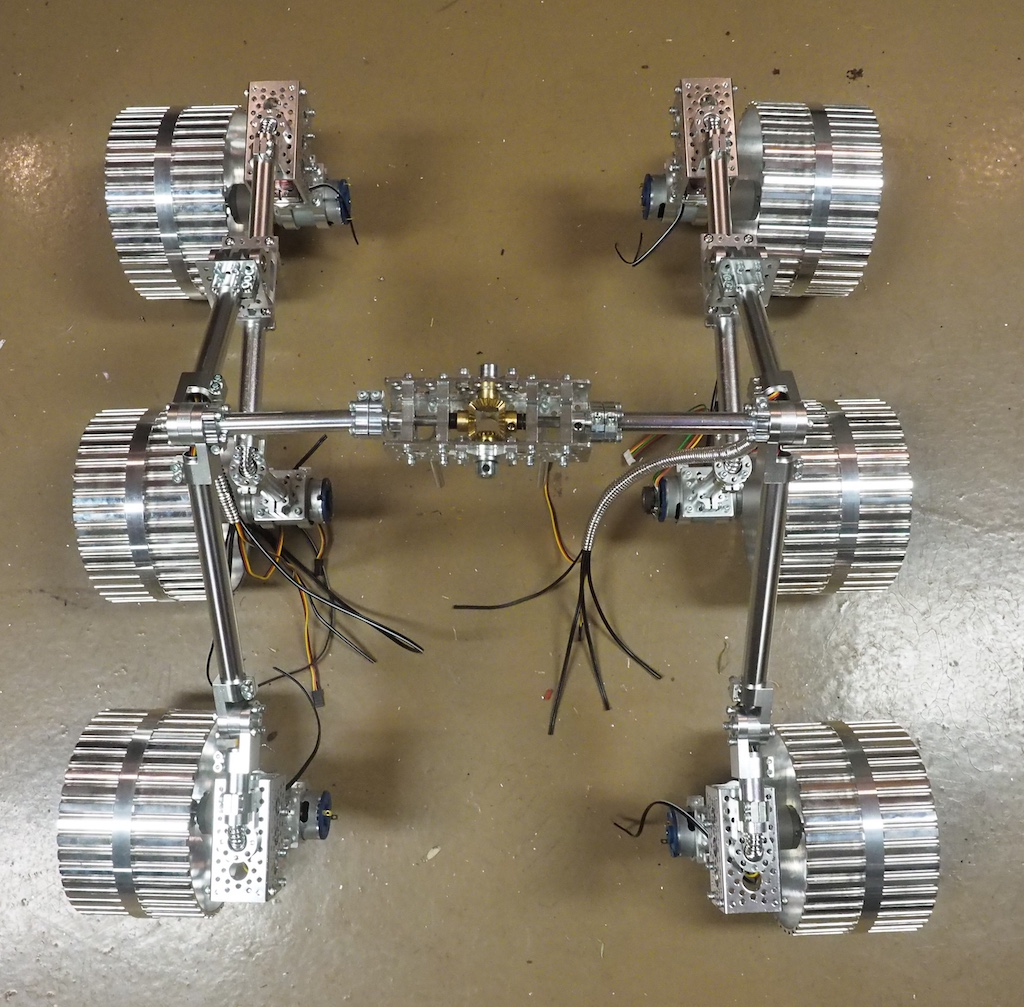
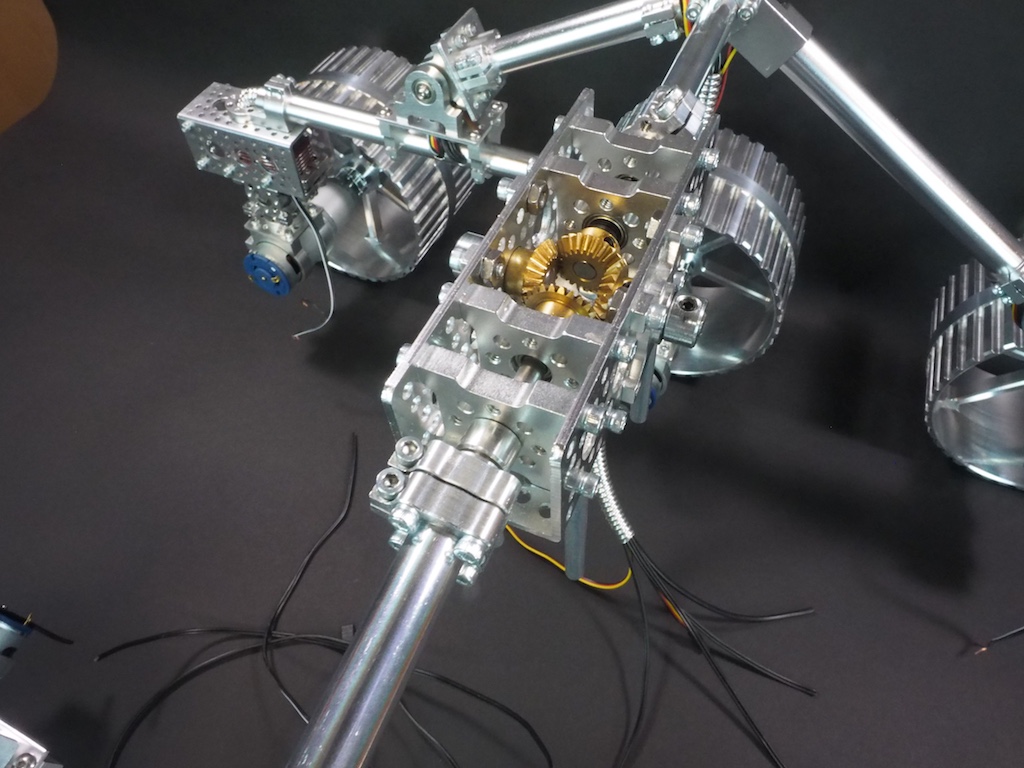
SpaceLS, a rocket company in the UK, has asked Beatty Robotics to team up with them to pursue a mission to put a rover on the moon. The first step in the process is for Beatty Robotics to design and construct a prototype for SpaceLS to use for testing, experimentation, and development. We’ve been working hard on the project, but we’ve been so busy we haven’t had time to take any pictures until now! Here are our first photos of the Lunar Rover’s rocker-bogie suspension system, counter rotating universal joint, steering servos, motors, and wheels. We designed the wheels to be large (6+” diameter) and wide for traveling through lunar ash. All the components of the robot will be machined out of aluminum, titanium, and carbon fiber. When it’s done, the robot will be solar powered and run on an Intel Edison. These are work-in-progress photos. The robot’s core/body, solar panels, video/sensor mast head, and other components are not shown.


by Camille | Robots, Workshop Blog
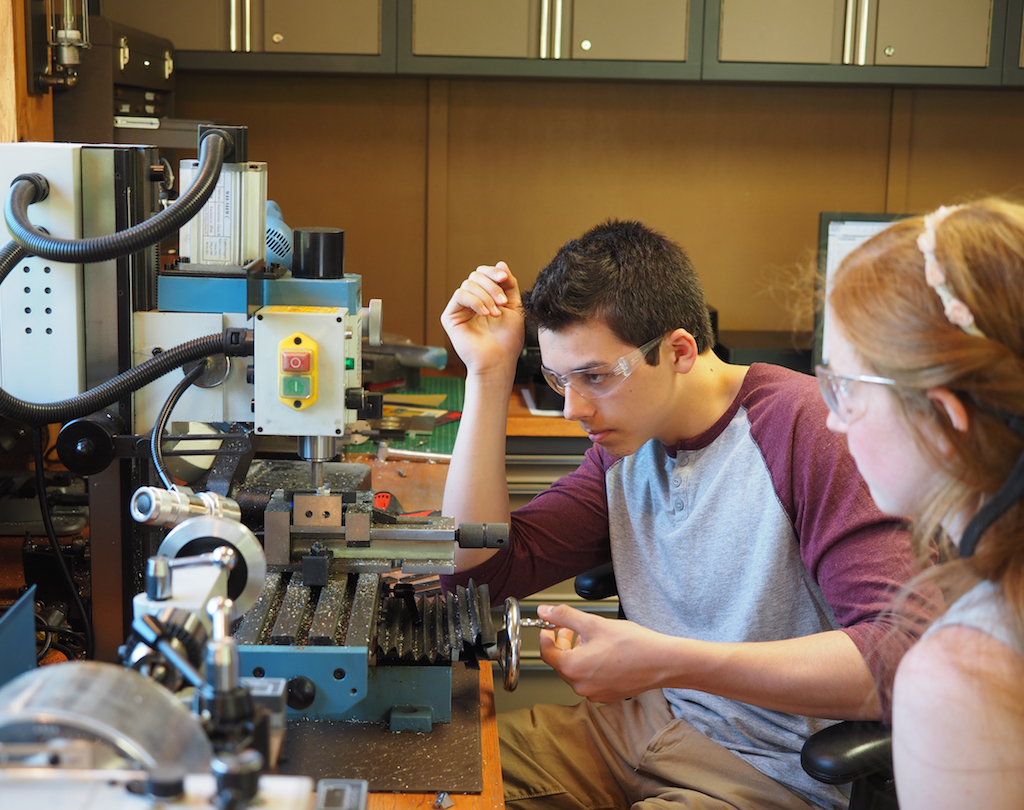
We have taken on a new project to build a compact rover for the New York Hall of Science, something that visitors can drive around in the corridors of the Science Center and that the staff can easily take to off-site activities such as schools and children’s hospitals. The design and construction is well under way. We are also happy to announce that we have a new member at Beatty Robotics. His name is Camille McCollough. He’s a junior at Carolina Day School, where he is taking robotics classes, as well as physics, math, and other curriculum. He has joined our team to learn, gain experience, and lend a hand. Here is Camille building the robot’s pan-tilt turret from Actobotics parts, including a servo, gearbox, and gears:
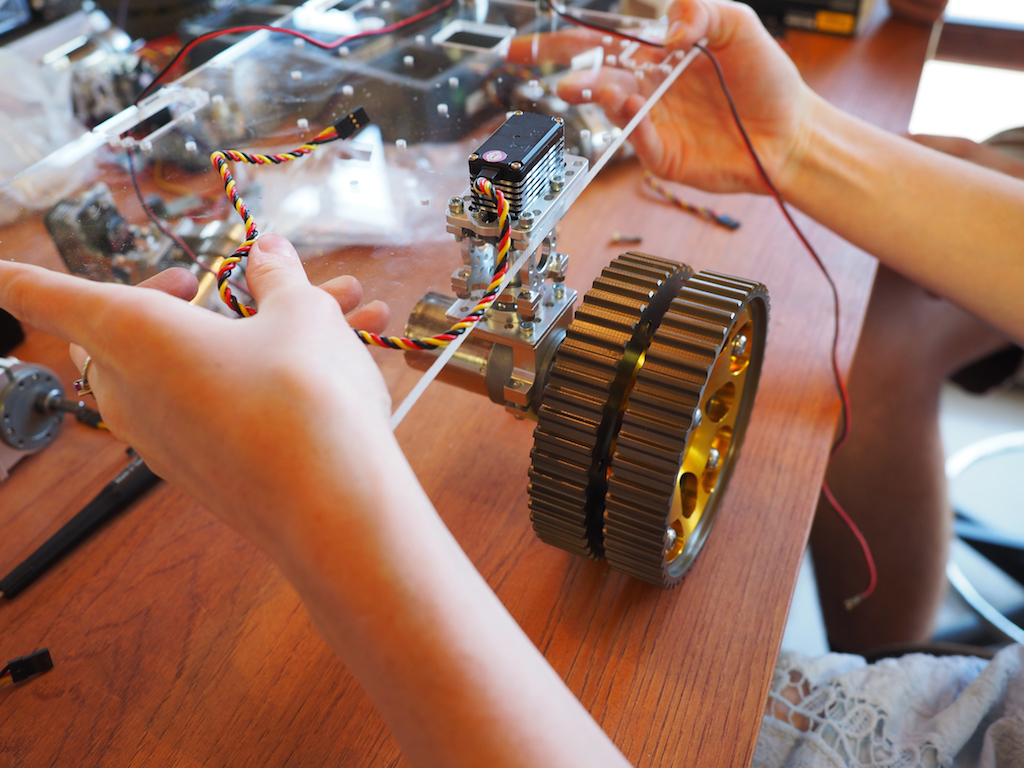
Camille and Camille working on the assembly of the robot’s front LED “head lights”:

Camille working on the assembly of the sonar mounts, while Camille works on the pan-tilt turret:

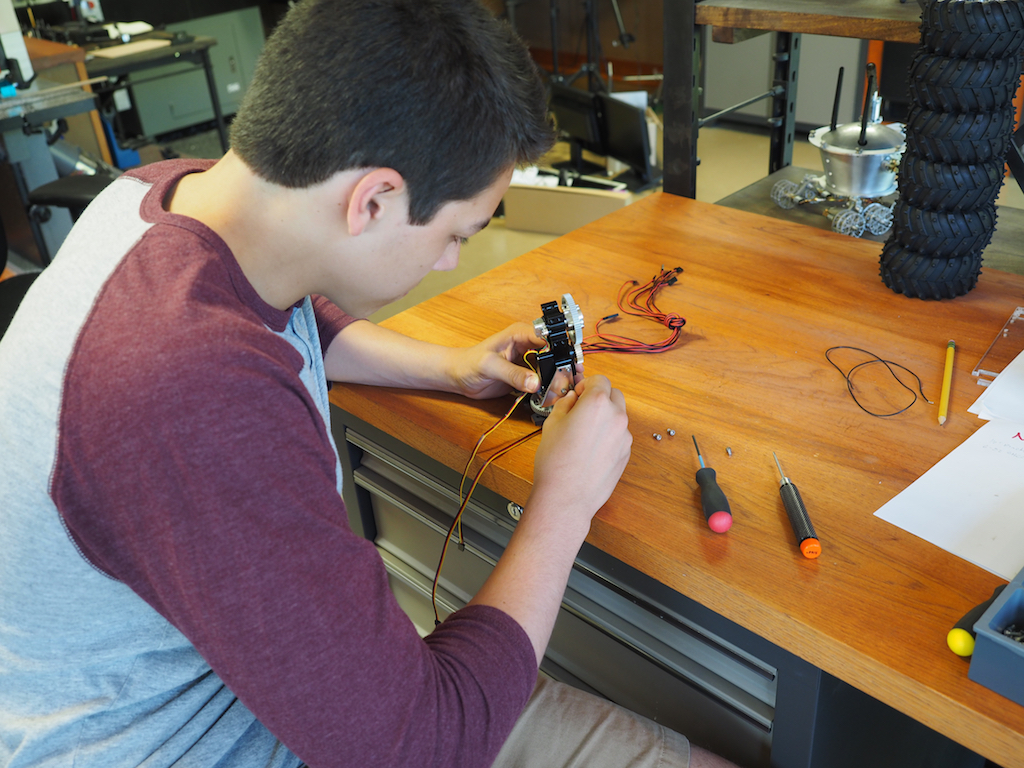
Camille building the first of the six steering assemblies, each of which consists of a servo, servo block, motor, hub, and wheel. We are using a combination of Actobotics parts and our own parts that we made on the CNC.

Camille tests the design and assembly of the first steering servo and wheel.
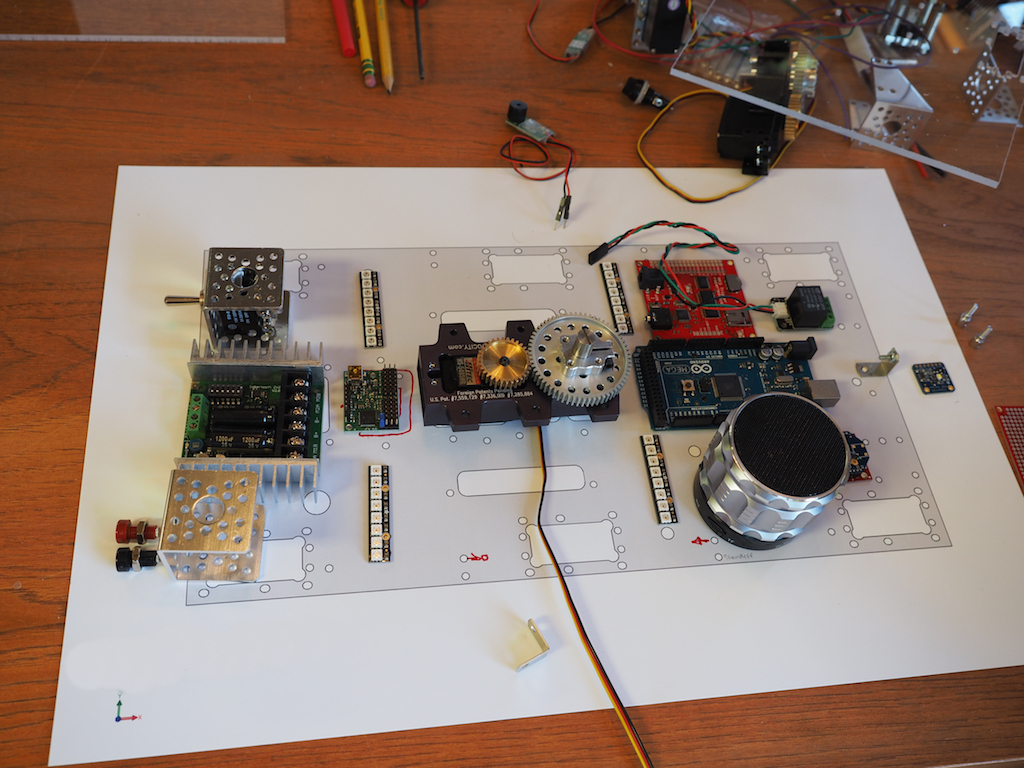
We use a scale drawing of the master plate to plan out where all the components are going to be positioned.
Camille shows Camille how to machine a part of the vertical mill.

Camille machines the next part on the vertical mill.
by Camille | Robots, Workshop Blog
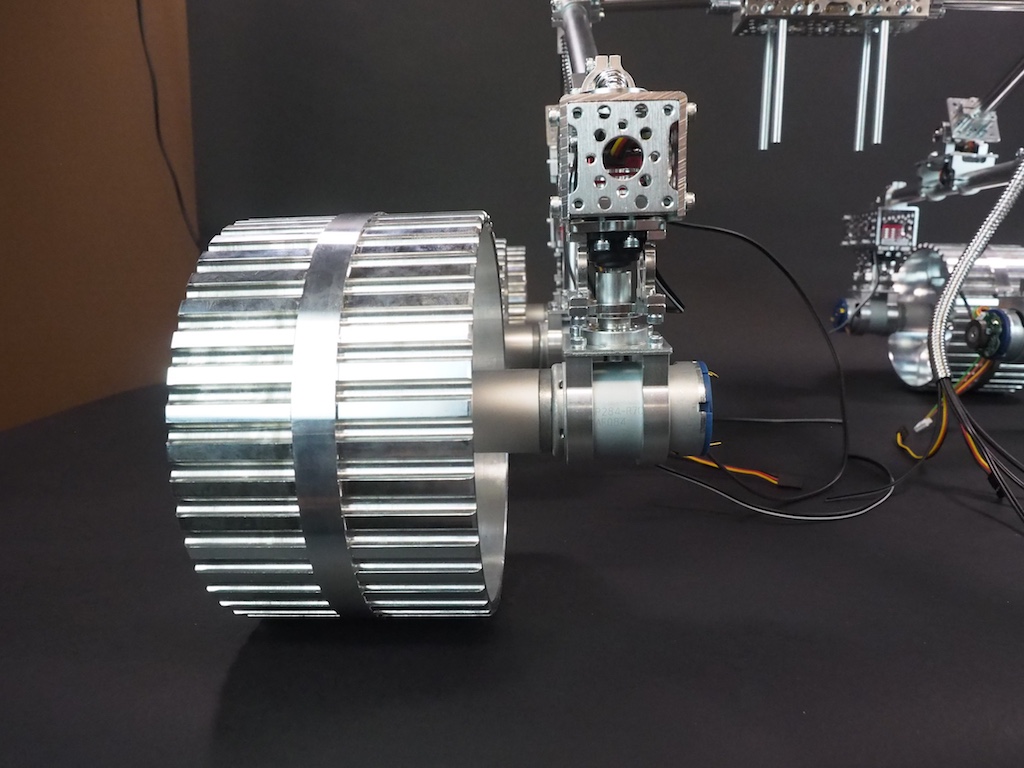
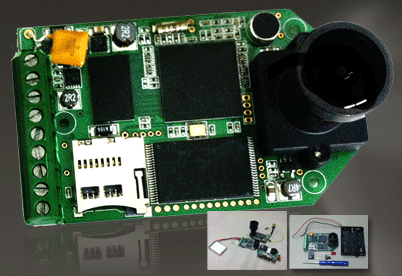
A little while ago, we discovered a cool new high definition video camera called the Hack HD. Think of it as the internal circuit board and camera lens of a 1080P GoPro camera, but unlike a GoPro, it’s designed to be hacked and tinkered with. It’s small and easy to embed into your own project. They even provide screw terminals for wiring it up. It’s also cheaper than a GoPro, which most people are leery of taking apart because of its price tag. The Hack HD records video to a micro SD card. It also sends VGA video through its Video Out wires. On our Actobot rover, we’ve wired the Video Out to a long distance transmitter and a pair of FatShark Video Goggles so that we can drive around remotely via First Person View (FPV)(more on that in a later post).
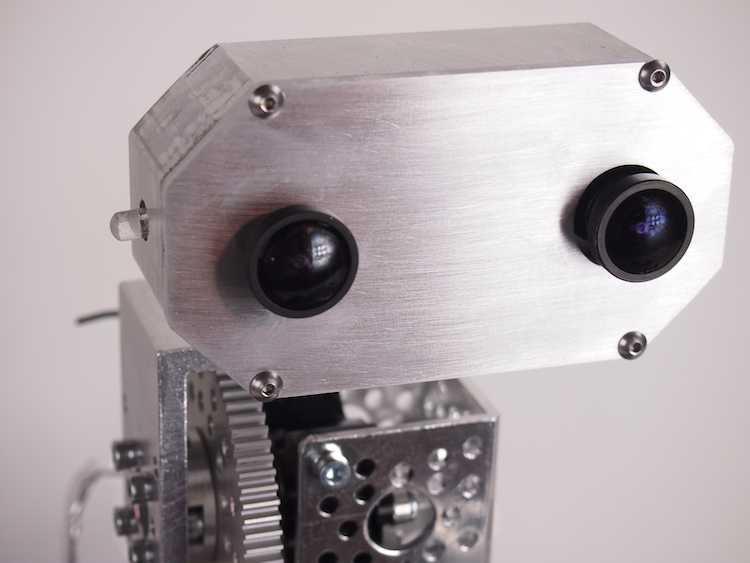
We used our CNC Mill to machine a custom case for the Hack HD so that we could mount it on the Actobot’s pan/tilt turret.

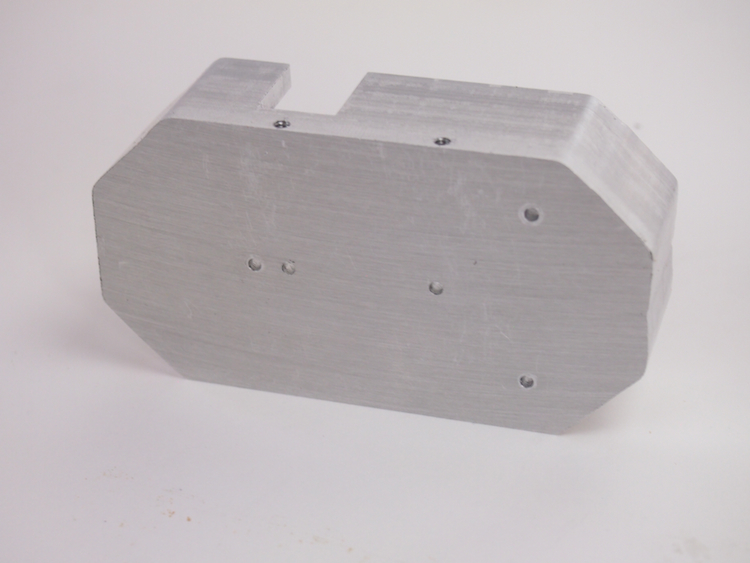
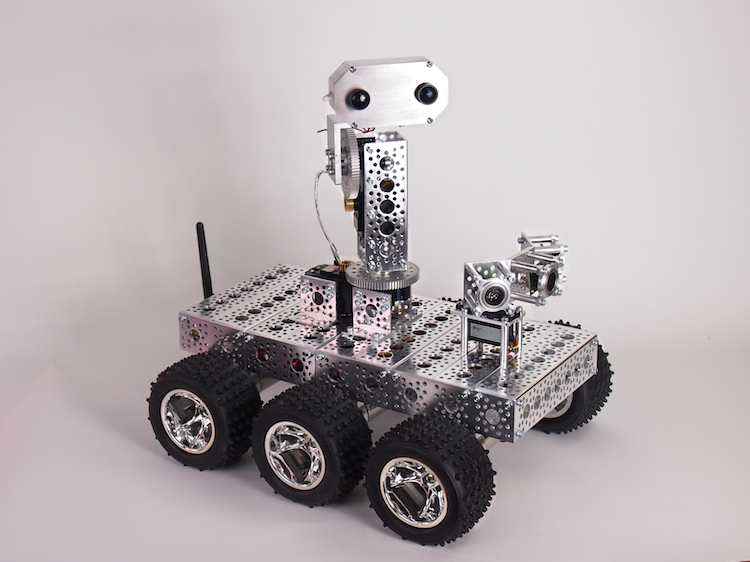
We should note that the Hack HD only has one lens (as shown in the photo at the top of this posting), but we wanted to experiment with giving the Actobot “eyes” so we built a false lens into the case.
With the completion of this case, our Actobot’s pan-tilt turret can now be quick-changed between three different video options : a WiFi camera, a GoPro, or a HackHD.
