Mini Mars Rover
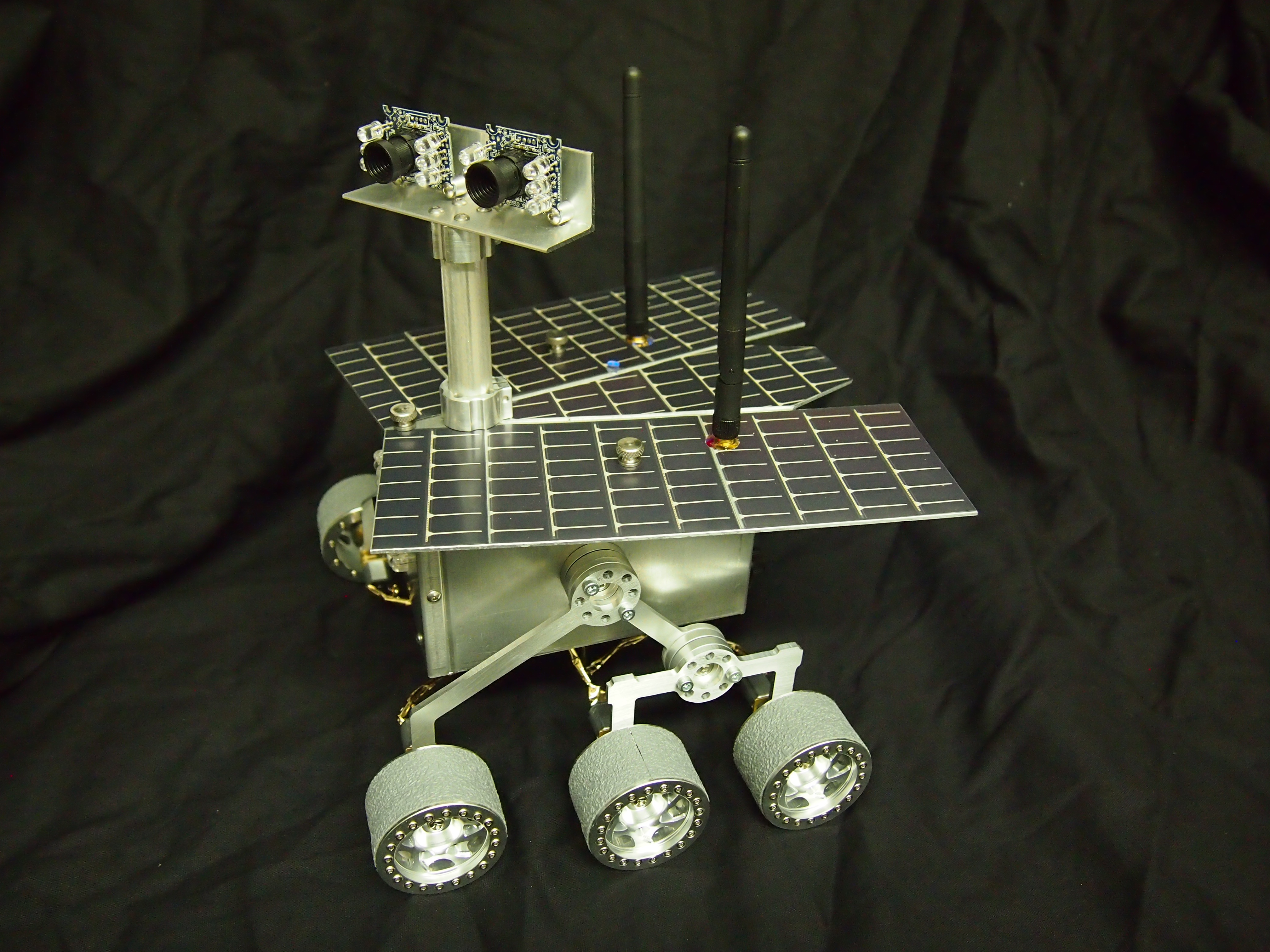
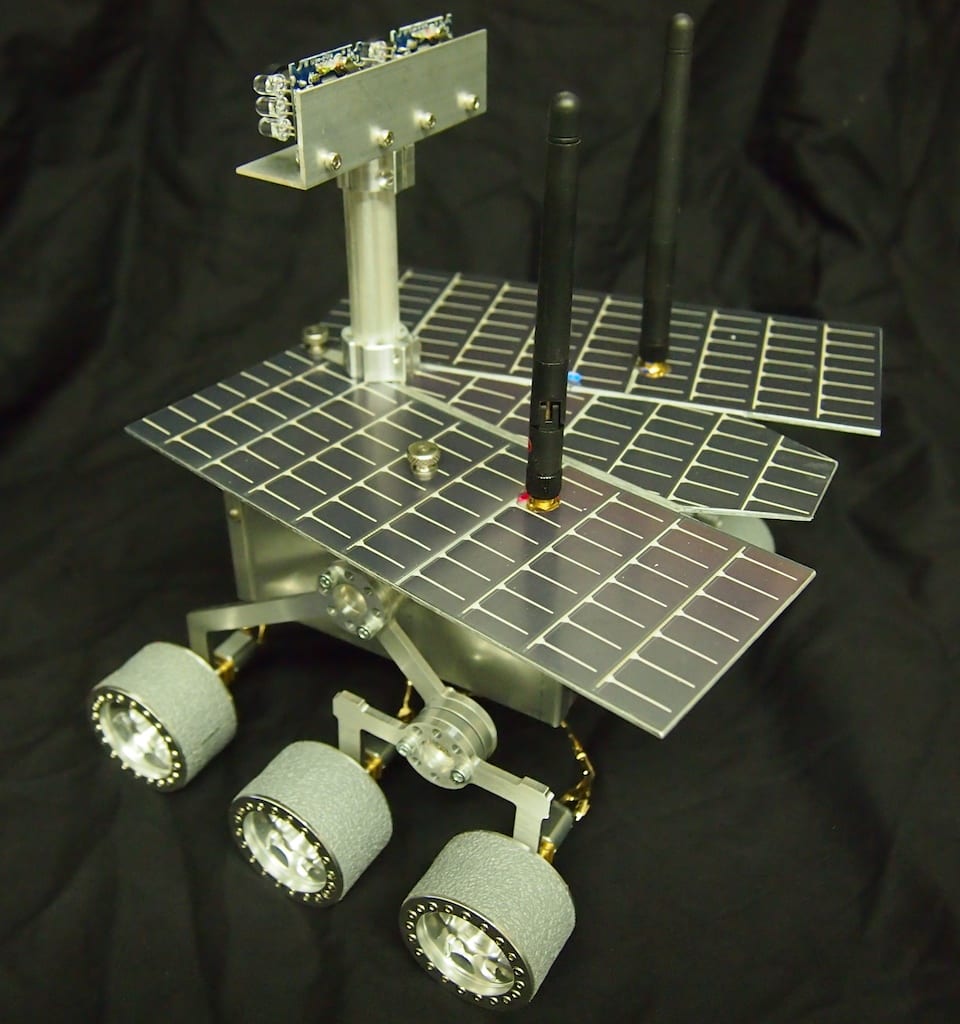
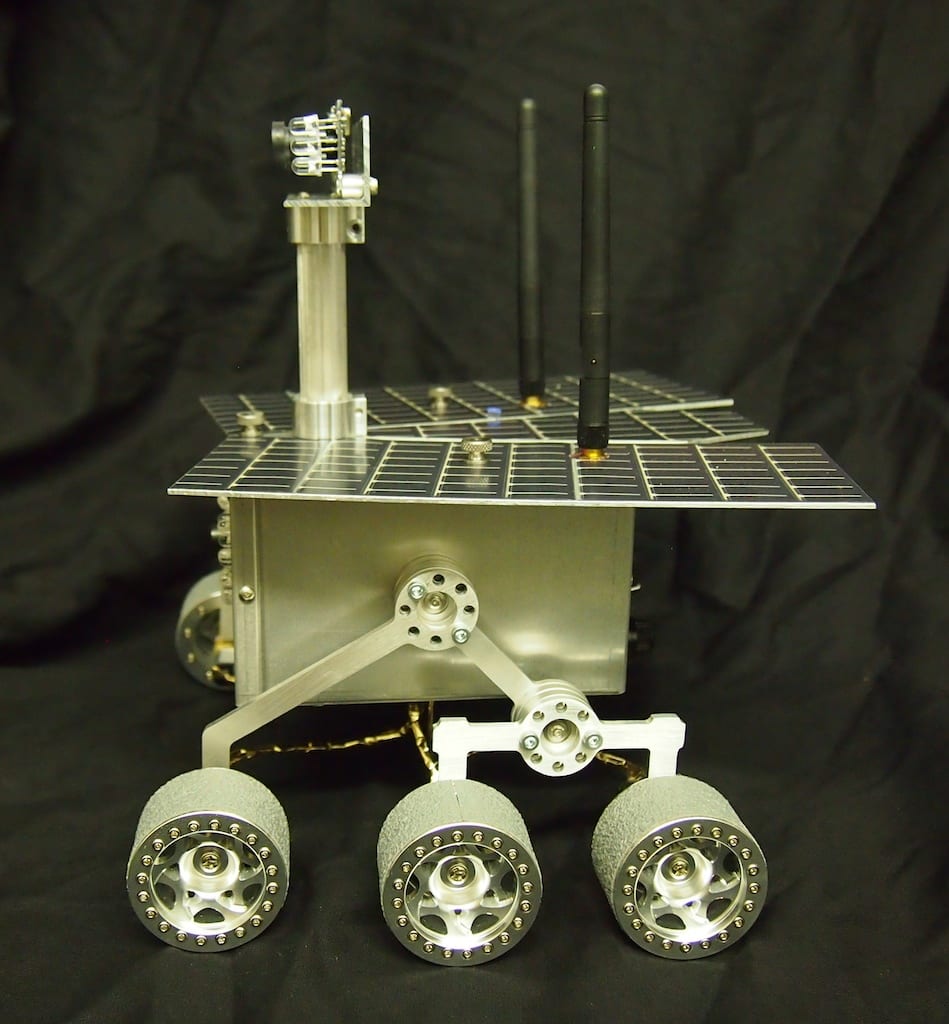
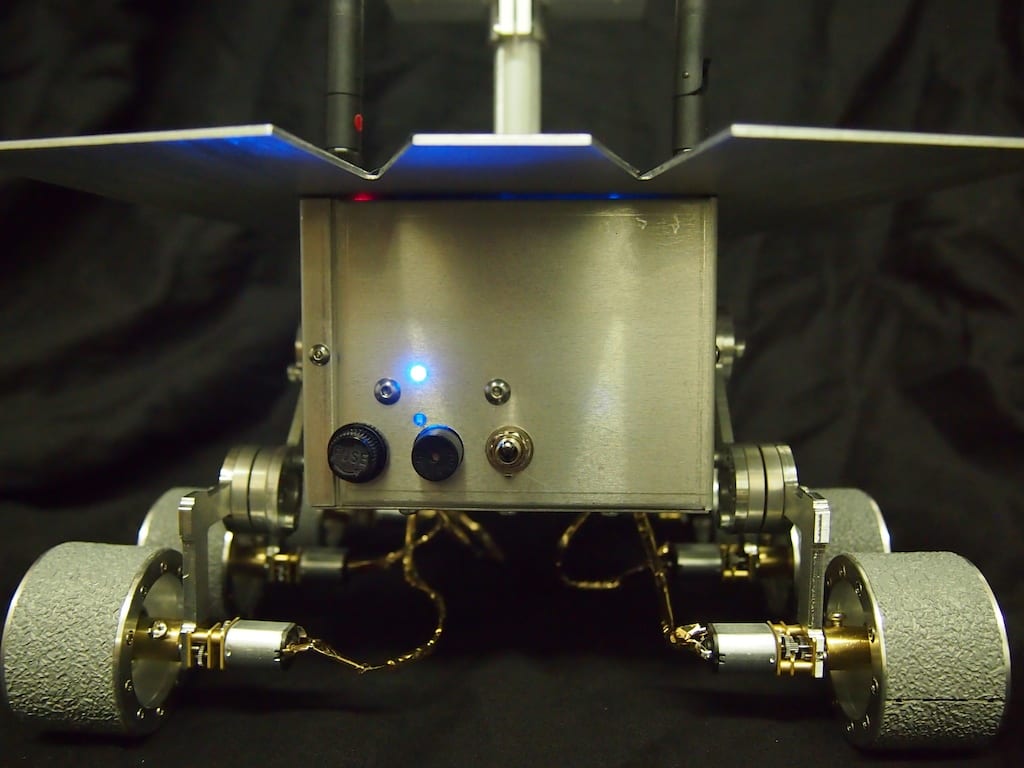
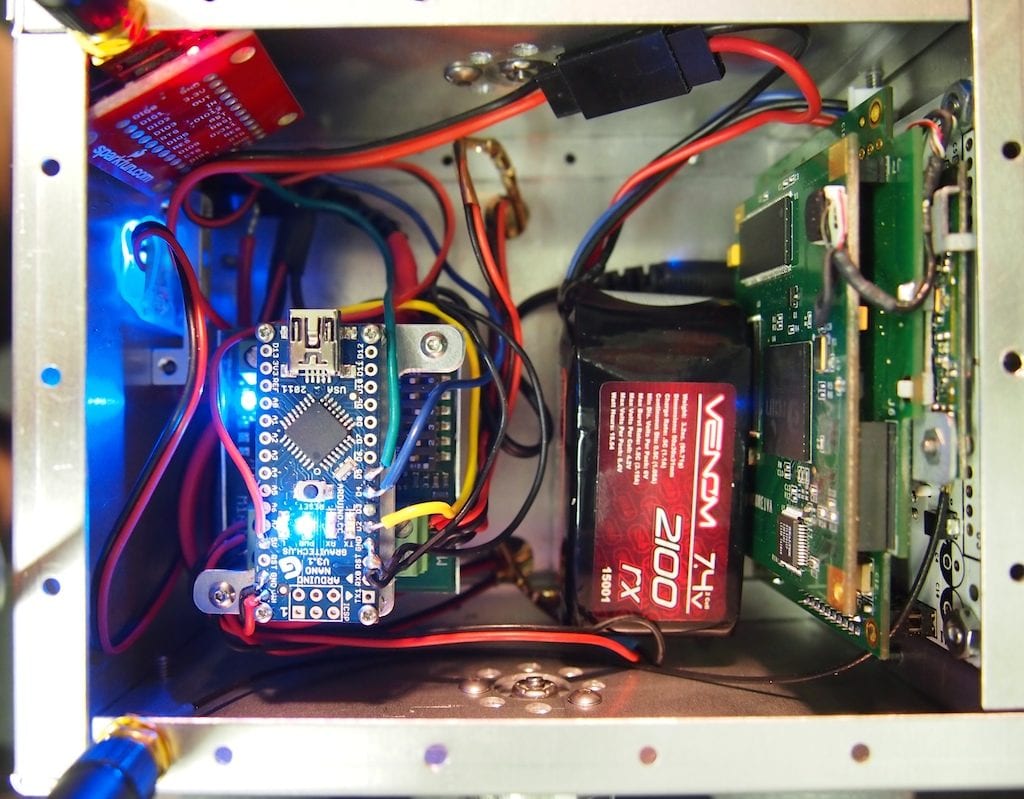
Recently we were asked to build a miniature Mars Rover for a new space museum in the Czech Republic. Although the Mini Mars Rover is only about 8″ long, it is a functional robot, including an Arduino Nano microcontroller, a high-resolution wifi camera, an xbee radio for remote control, a Sabertooth motor controller, six motors, a rocker-bogie suspension system, and other components. We designed and machined most of the robot’s parts using our CNC Mill.

Mini Mars Rover – Top Rear View 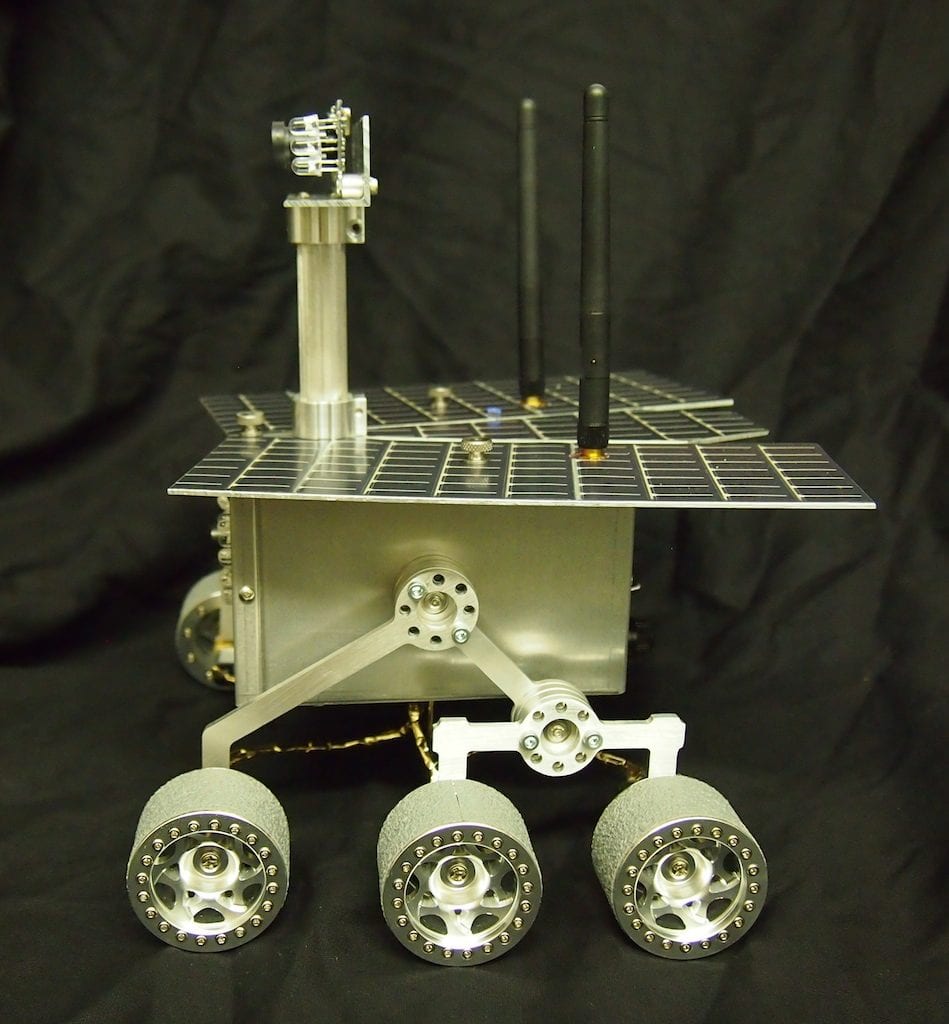
Mini Mars Rover – Side View 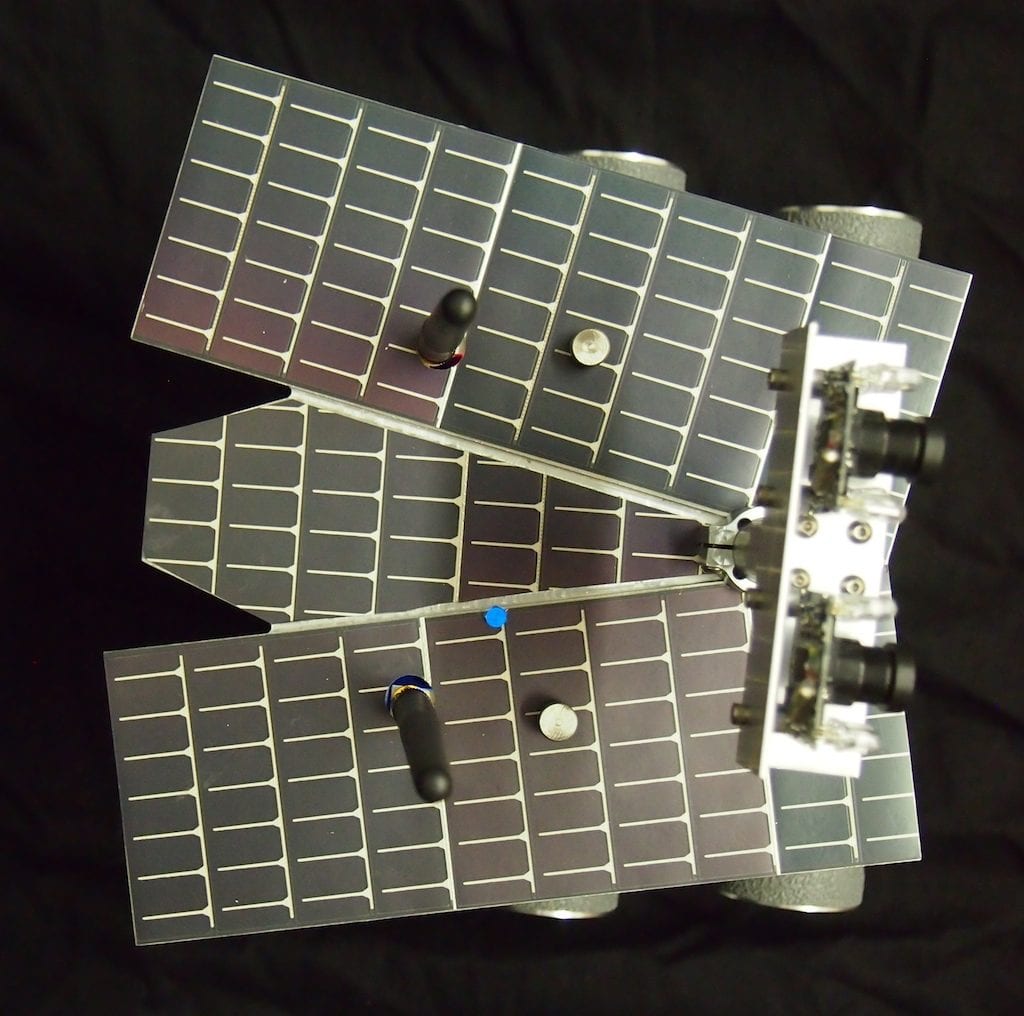
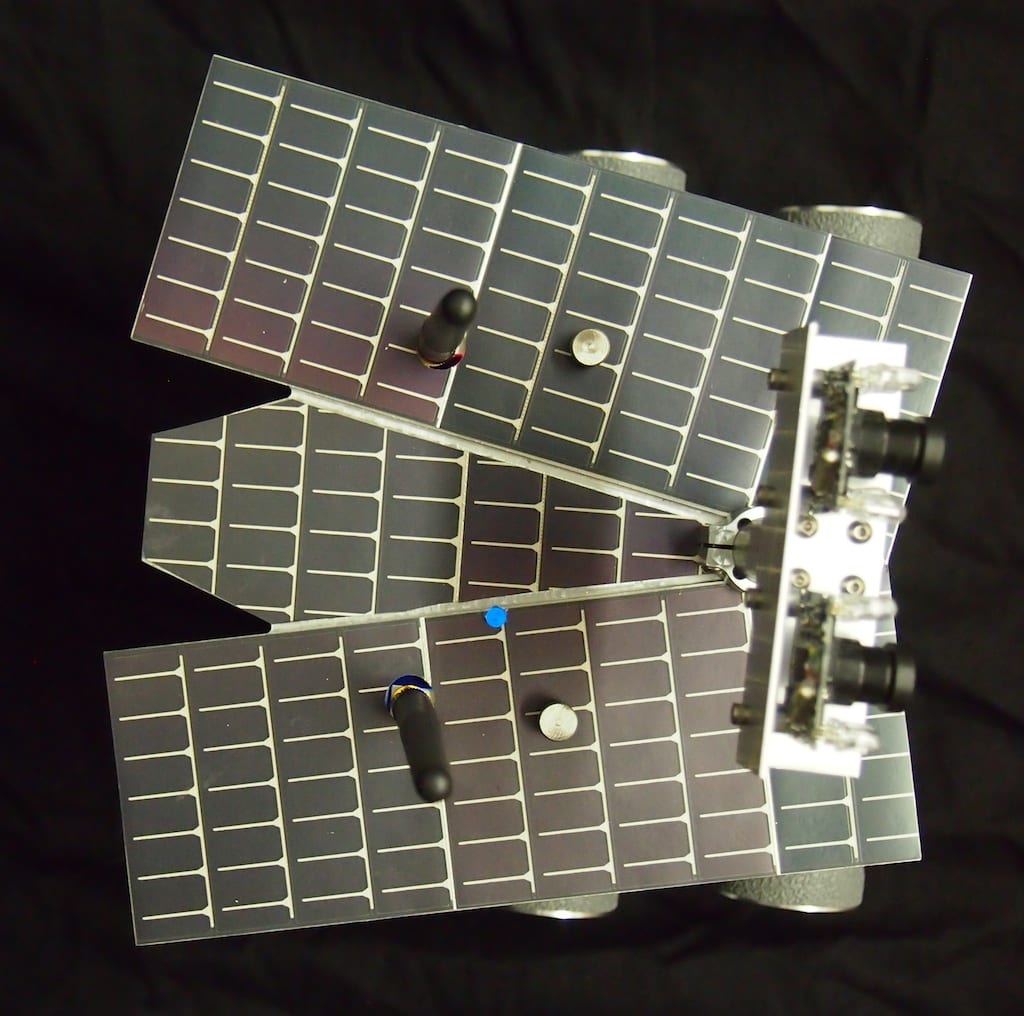
Mini Mars Rover – Top View 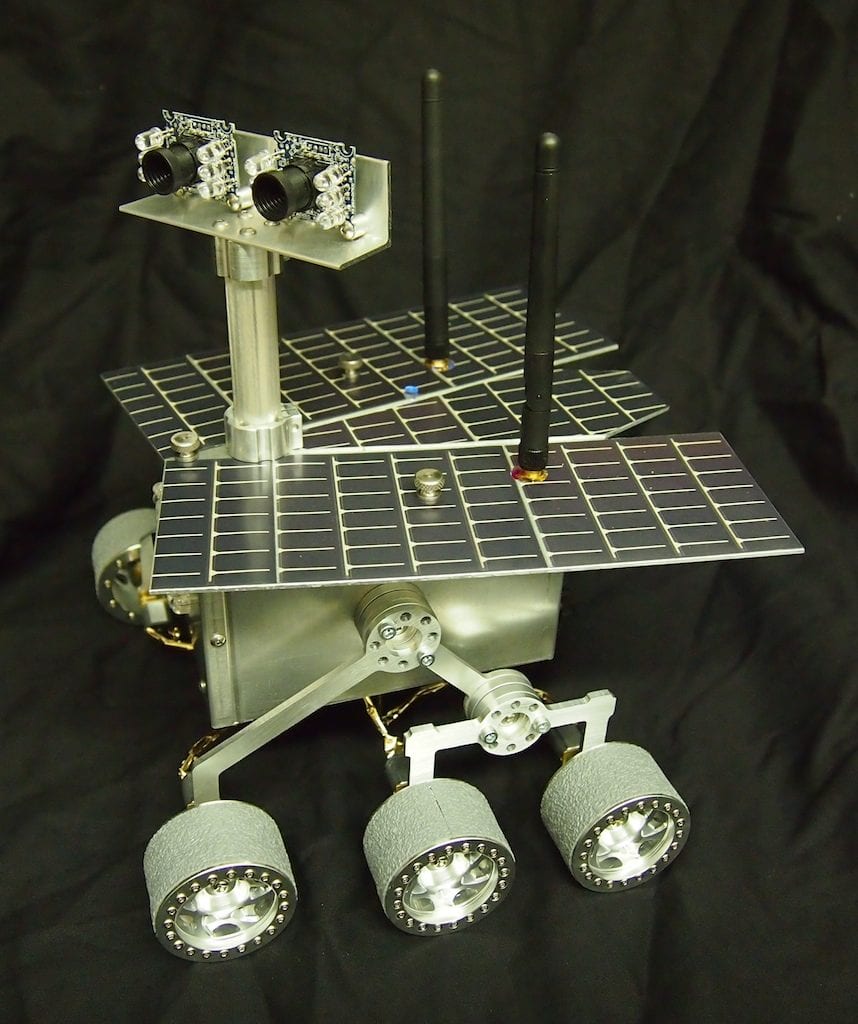
Mini Mars Rover 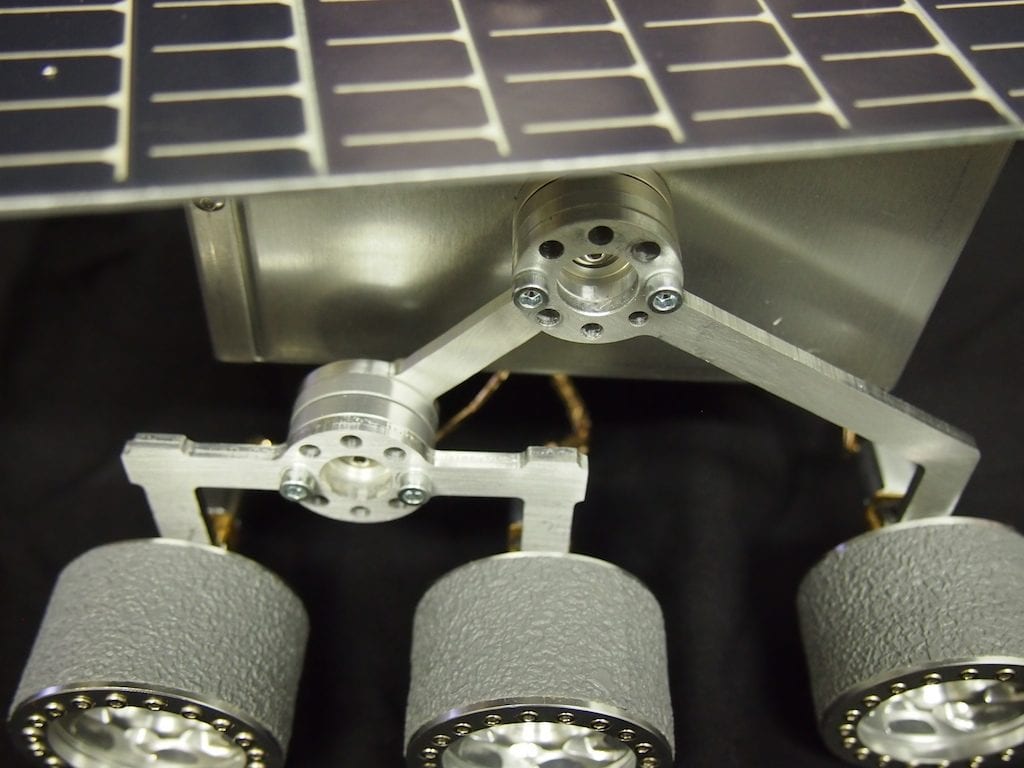
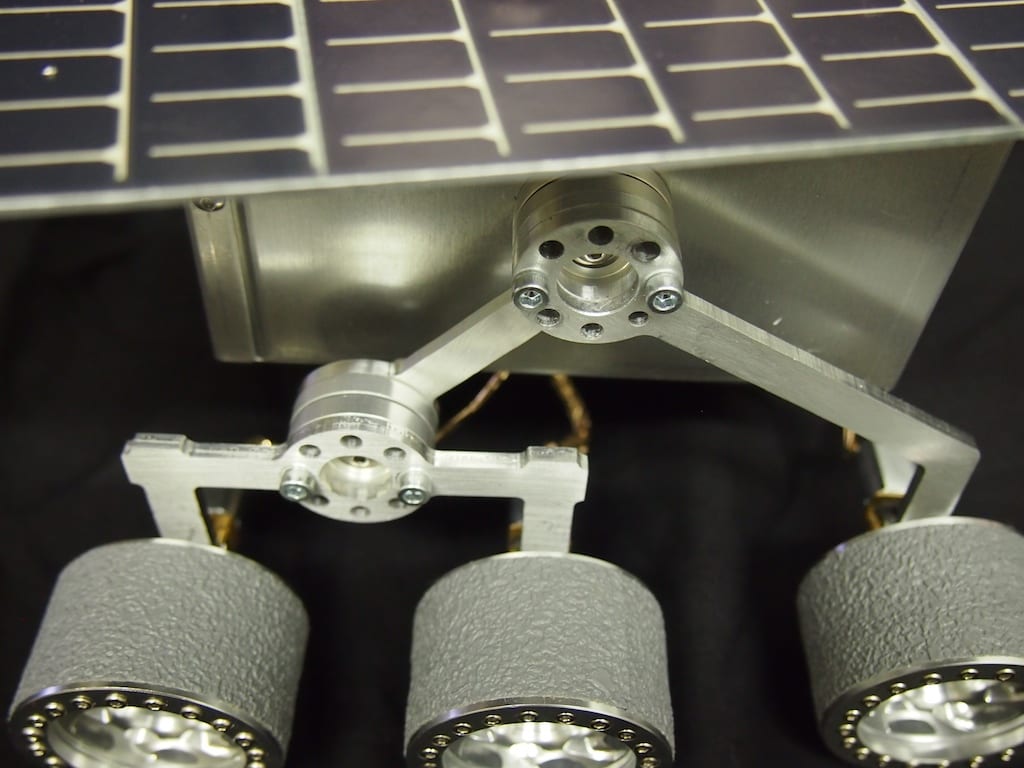
Mini Mars Rover – Rocker-Bogie Suspension System Close Up 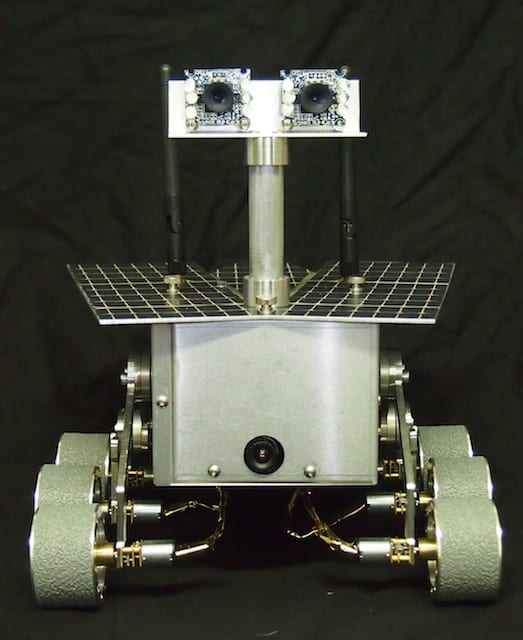
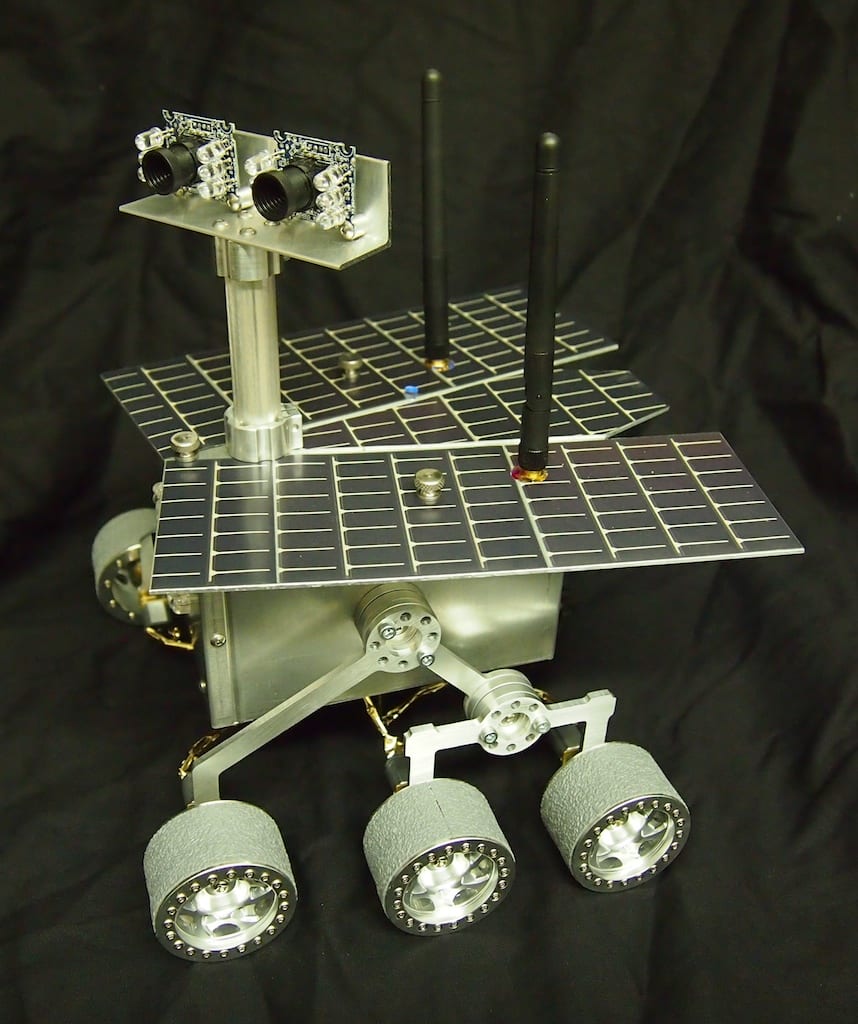
Mini Mars Rover – Front View 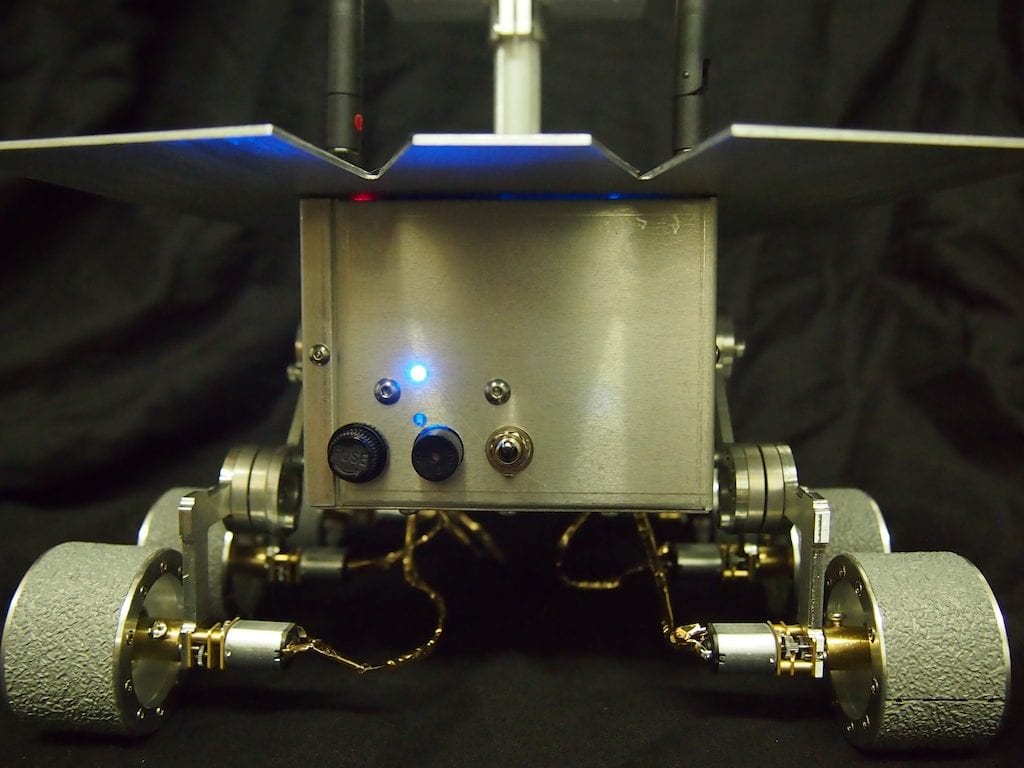
Mini Mars Rover – Rear View

Mars Rover Top Plate immediately after it has been CNC machined but before the solar panels have been applied. 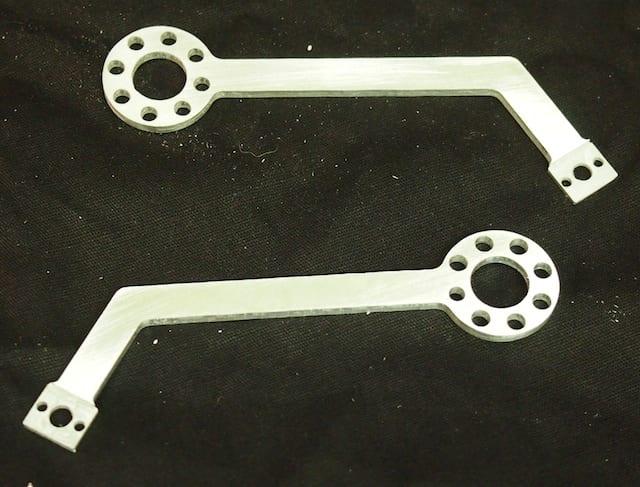
Front Arms with motor mounts 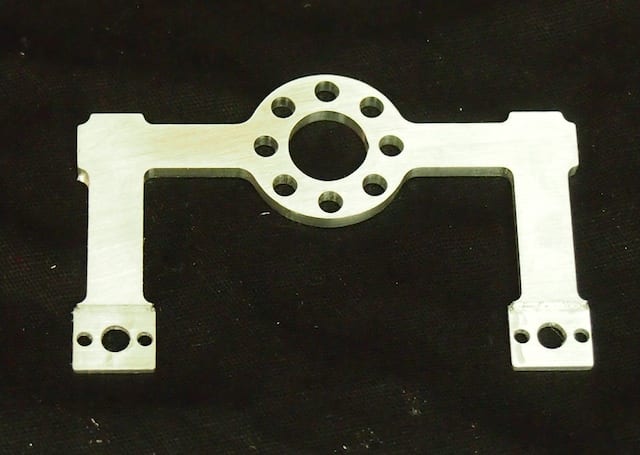

Rear Arm 
Mini Mars Rover Back Plate, Bottom Plate, Front Plate, and Side Plates. The newer version has a smaller hole for the camera.


