Today, we would like to introduce Terrabot, our Terrain Traveling Robot. Based on a modified “rock crawler” chassis, its primary purpose is to traverse rocks, branches, steep slopes, flower beds, boulders, mountain trails, and other extremely rough terrain.
Terrabot
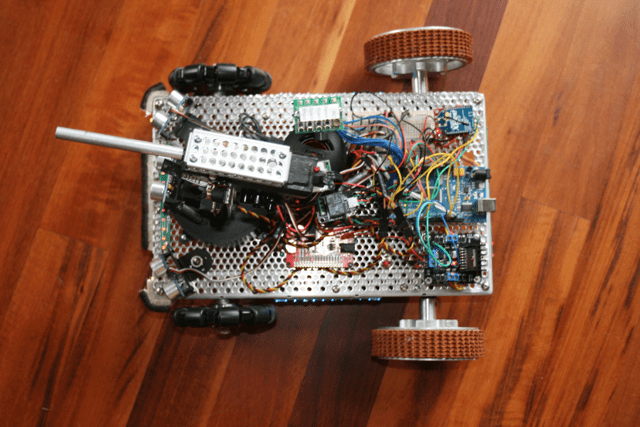
Terrabot is equipped with 4-wheel steering (4WS). Two high torque servos shift machined aluminum linkages to rotate its front and back wheels independently. Note the navigation GPS on top of the back servo (on the left) and the sensor turret on the front (right). Terrabot’s four wheels are driven by two powerful brushless motors (bright blue) and robust gearboxes (centered in each axle).
Terrabot’s highly-articulated chassis is designed to twist up to 90 degrees as the robot is moving, allowing it to climb over huge boulders and other obstacles. In this picture, the chassis is articulated 45 degrees. Note that the back tires are still on the ground because the center linkages of the bot are twisted.
Terrabot’s topside electronics include a tiny Arduino Nano (lower left), an XBee Radio (right), and a 9-DOF Mongoose Inerntial Measurement Unit (IMU). The IMU measures the degree of tilt and the rate of acceleration in the X, Y, Z planes, which we plan to use for our stabilization algorithm.
Terrabot’s other electronics are stuffed into the little chamber inside the aluminum core (note the blue LED at the bottom of the picture). This includes the two Electronic Speed Controllers for the motors, the Pololu Maeastro motor/servo controller, the power rails, various voltage regulators, and other electronics. The navigation GPS (see the first picture), is mounted on top of the rear servo so that it has a clear view of the sky.
Terrabot Side View, showing the shocks, the frame, and LIPO battery beneath. Note the “roll posts” we installed on the top to protect the topside electronics if Terrabot falls off a rock during a climb and flips over. (We learned this one from experience!)
Terrabot Front View. There are three sonars mounted in the sensor turret, which rotates 270 degrees when the robot “looks around” to determine the best course through obstacle-ridden rough terrain.
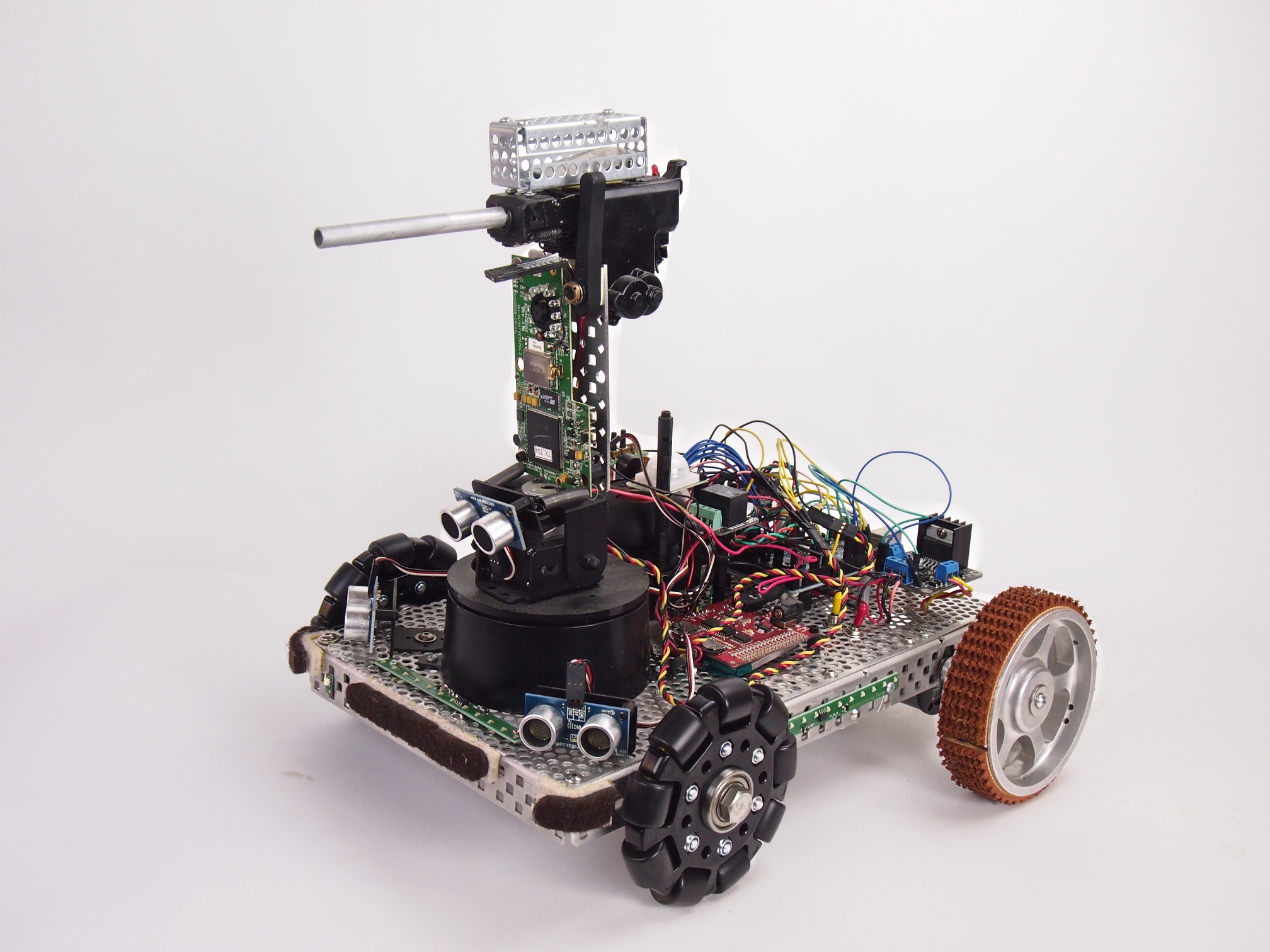
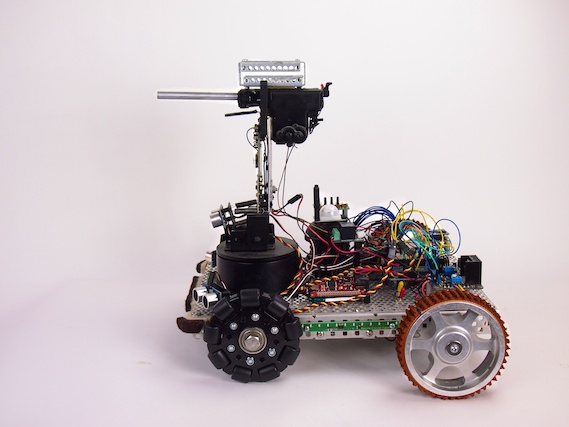
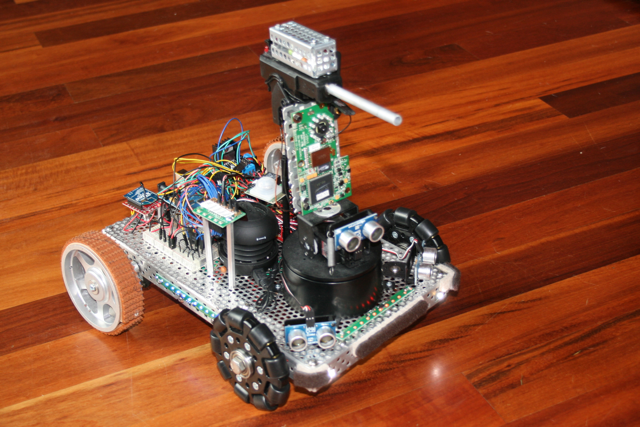
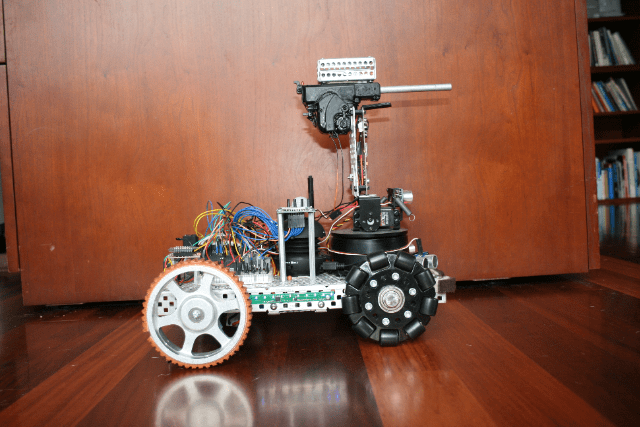
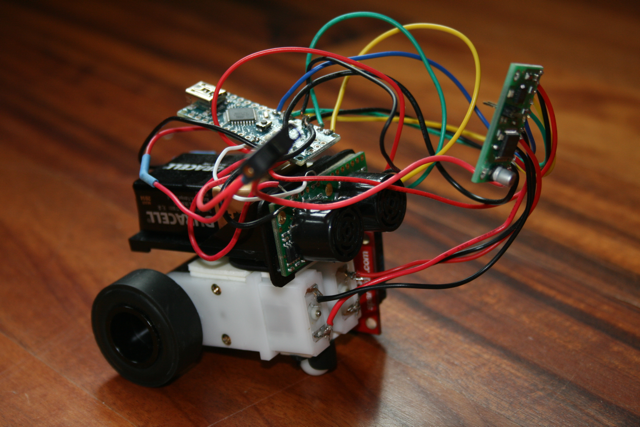
Security V is a small security robot. It’s equipped with the following capabilities:
Automatic electric gun (Airsoft pellet gun) with ammunition cage
Pan-Tilt Gun Turret
Targeting laser
FPV Camera
(3) Ping sensors for object avoidance
LED Light Strips
MP3 Sound Player
IR Human Detection Sensor
Moto Controller
Two motors
Two treaded drive wheels and two omni wheels
Arduino Mega Microcontroller
Xbee Radio for remote control
Button panel for selecting the mode
We programmed it with five different modes:
1. Roams autonomously around the house, playing R2-D2 like sounds as it explores & avoids obstacles 2. Remote Control 3. Dance Mode (Plays the song Mr. Roboto and dances around) 4. Guard Mode (enables its infrared human detection sensor and plays a police siren if anyone tries to sneak past it) 5. Shoot (shoots the gun)
Security RobotSecurity RobotSecurity Robot – Top View
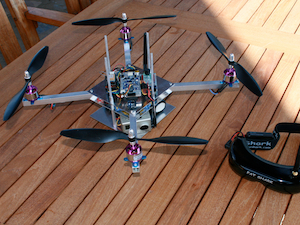
We would like to introduce our flying drone robot. We can fly this robot using Remote Control or it can fly itself using sonar, an on-board GPS, and following longitude/latitude waypoints. We have experimented with various frame designs and electronics, so you’ll see some variation in the pictures. Be sure to check out the video of of me piloting the flying robot.
How We Came To Build a Flying Robot Drone
One day, we asked ourselves, “What kind of robot would you like to build next?”
We both answered, “I want to build a robot that flies!”
We knew it was going to be really hard, but we decided to give it a try. We set out to learn what it was going to take to build a robot that flies. We researched our options, purchased the various motors, propellers, and electronic components we thought we needed, and started soldering. As our initial design came together, we began cutting, drilling, and assembling the various aluminum pieces for the frame, which we knew would have to be both light and strong.
The Features and Design
We decided on a quad rotor design, which is a helicopter-like-thing with four propellers. The left and right motors use normal “puller” propellers and turn counter-clockwise. The front and back motors use “pusher” propellers and turn clockwise. This helps counter-act the torsional forces associated with rotor craft.
The core of the robot’s electronics is a special Arduino microcontroller board specifically designed for auto-piloting drones. This is combined with a special Inertial Measurement Unit (IMU) sensor shield that provides a 3-axis gyro, 3-axis accelerometer, barometric pressure, and other various other avionics sensors so that the robot can sense its tilt, pitch, and yaw in three-dimensional space at all times. The software reads the robots orientation and feeds voltage to each of the motors in proportion to the power that is needed to keep the robot level at all times. This way, the pilot focuses on the direction and speed he wants to go, rather than spending all his time struggling to keep the robot from flipping, spinning, or rolling.
Once we flew and crashed our first design, we made some improvements and tried again. Then we crashed again, made some more improvements, and so on. None of our robots have required more trial and error than this one. But step by step, improvement after improvement, our robot got better and better. Today, it flies very well, has many neat features, and thanks to repeated practice, is relatively crash resistant.
We usually fly the robot using an RC Transmitter. However, it also has many autopilot drone features that we enjoy experimenting with. For example, the robot has an automatic take-off and landing sequence. The robot also includes a downward-facing sonar so that the robot knows its exact altitude at all times. By flipping a switch on our transmitter, we can put the robot in “hold altitude” mode, which tells the robot to automatically and constantly adjust the motors to remain at a constant distance from the ground as we fly it around.The robot is also equipped with a GPS chip so that it knows its exact longitude and latitude at all times. The robot can also follow a series of waypoints uploaded to the microcontroller from Google Earth. It turns out that we were not the only ones trying to build a robot that flies. We have joined with a whole community of people on the Internet (DIY Drones) who enjoy building and flying their own robot drones.
The Mini Flying Drone
We have also built a Mini Flying Drone. Click here to see details.
Mini Quadrotor Drone Robot
The upgraded Black Hornet mini drone
The Future
Although our drones are flying quite well, there is still plenty more we want to do. We look forward to lots of fun and experimentation. We’ve spent most our time building, flying, and improving the robot’s frame and capabilities, but in the future we hope to do more with First Person View (FPV) flying using our video goggles, high-definition arial photography, automatic navigation, and more.
Click here to see our latest flying robot drone, which we made out of carbon fiber.
Flying Drone Robot – Technical Specifics
Aluminum Frame: Beatty Robotics
Aluminum, Hardware, and other materials: McMaster-Carr
Microcontroller: ArduPilot Mega (i.e. Arduino Mega Autopilot board)
Avionics sensor board: ArduPilot Mega IMU Shield
Electronic Speed Controllers: (4) m2mPower
Motors:(4) jDrones
Propellers: (4) EPP 10×45
Radio Control Transmitter and Receiver: Futaba
Battery: 12v 3-cell 20C LIPO
Magnetomer: DIY Drones
GPS: MediaTek
High Definition Camera: GoPro
VideoTransmitter: ImmersionRC
FPV Video Goggles: FatShark
Special thanks to the Do-It-Yourself Drones community, especially Chris Anderson, Jani Hirvinen, and the other guys involved with DIY Drones. You guys helped us make our dream of a flying robot a reality. Fly on!
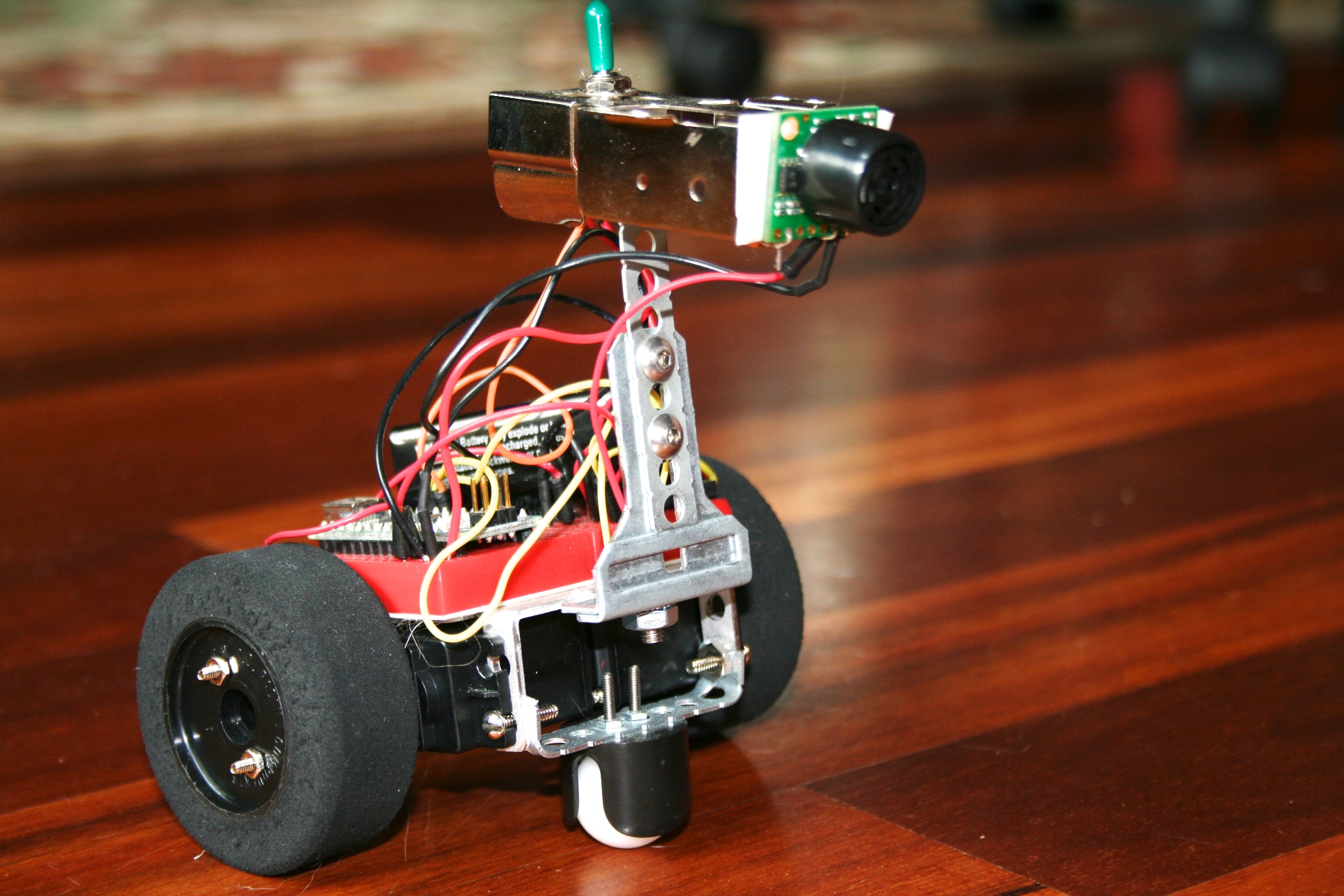
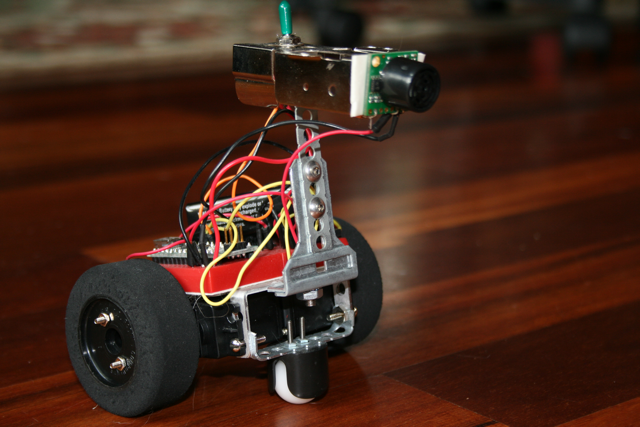
We made these tiny-bots from the small, spare parts of their older brothers. Though not as high-tech as the larger ones, these little guys defiantly beat the record of being the smallest by a long shot. Their size makes it easy to put them in boxes and bring them to school to share with my classmates and tell them a bit about breadboards and Arduinos, soldering and heatshrinks and all of the others. These robots include Sonar obstacle detection, roaming navigation, as well as Remote Control (RC).