Lunokhod
Lunokhod, which means “Moon Walker” in Russian, was the first roving remote-controlled robot to operate on another terrestrial body. The Soviet Union landed it on the moon in 1970 equipped with a conical antenna, a large directional antenna, two television cameras (the eyes), and a vast array of sensors.
Beatty Robotics was asked to build a functional Lunokhod robot for a new space museum that is being built in Prague in the Czech Republic. As soon as we saw Lunokhod’s Jules Vernes steampunk design we fell in love with it. We were excited to begin. The real Lunokhod is about 8′ long. The museum wanted a miniature version that fit in their exhibit, so ours is about 8″ long. Visitors to the museum will operate it by remote control using the First Person View (FPV) camera.
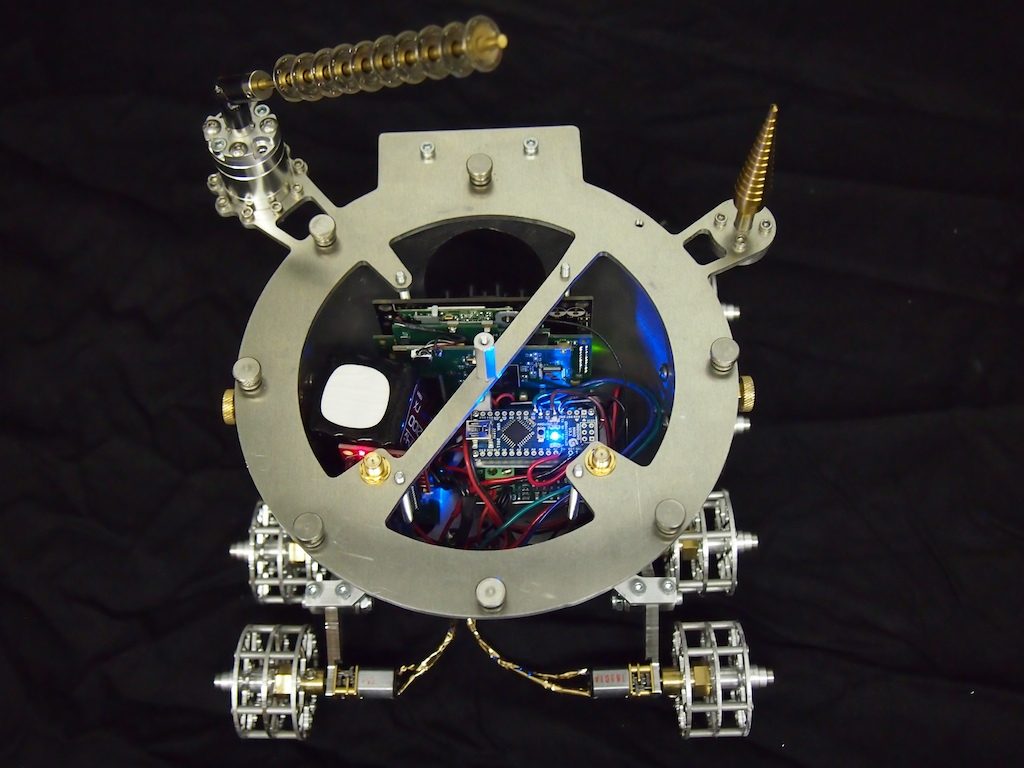
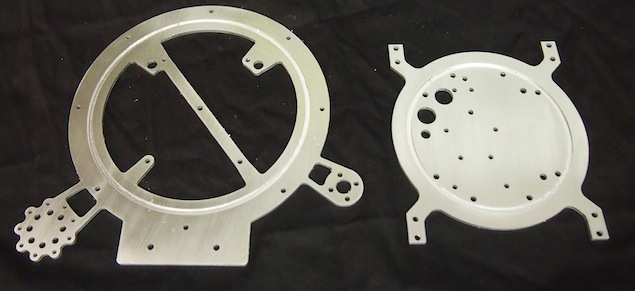
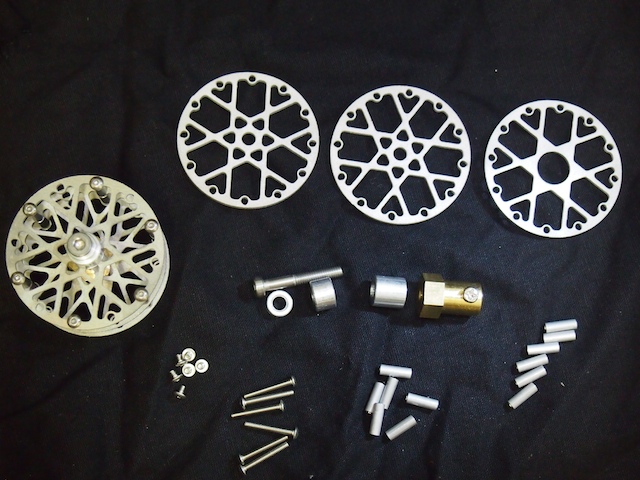
Lunokhod includes an Arduino Nano microcontroller, an Xbee radio, a Sabertooth motor controller, 8 gear motors, 8 custom-machined wheels, a custom-machined rocker-bogie suspension system, a tub-shaped body, a domed top, a wifi camera, and other components. Because of the robot’s unusual appearance, we designed and machined nearly all of the parts on our CNC, including the spoked wheels, the wheel rockers, the base plate, the rim plate (which turned out to be the most complex part we have ever machined). Working with the truncated-cone of the tub-shaped body was also particularly difficult. But in the end, we love how it all turned out. We hope you like it, too. Pictures and video below.
A photograph of the real Lunokhod robot
Drawing of the original Lunokhod robot
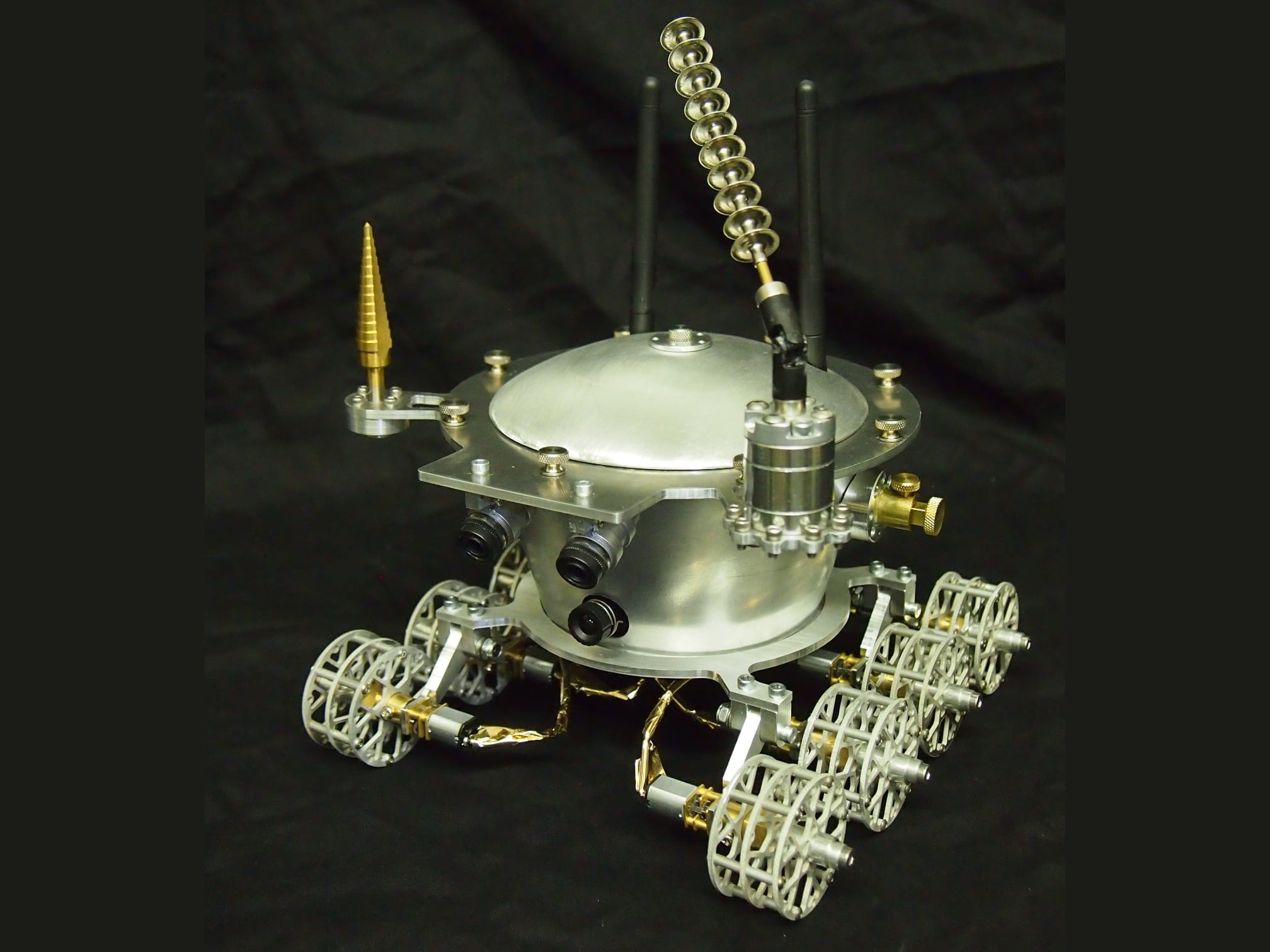
Lunokhod by Beatty Robotics 
Lunokhod – Side View 
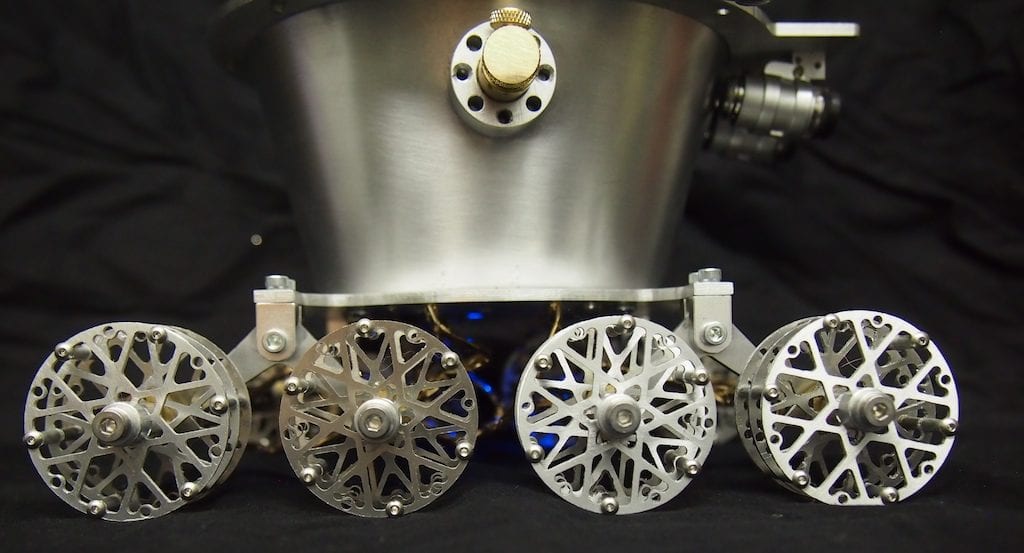
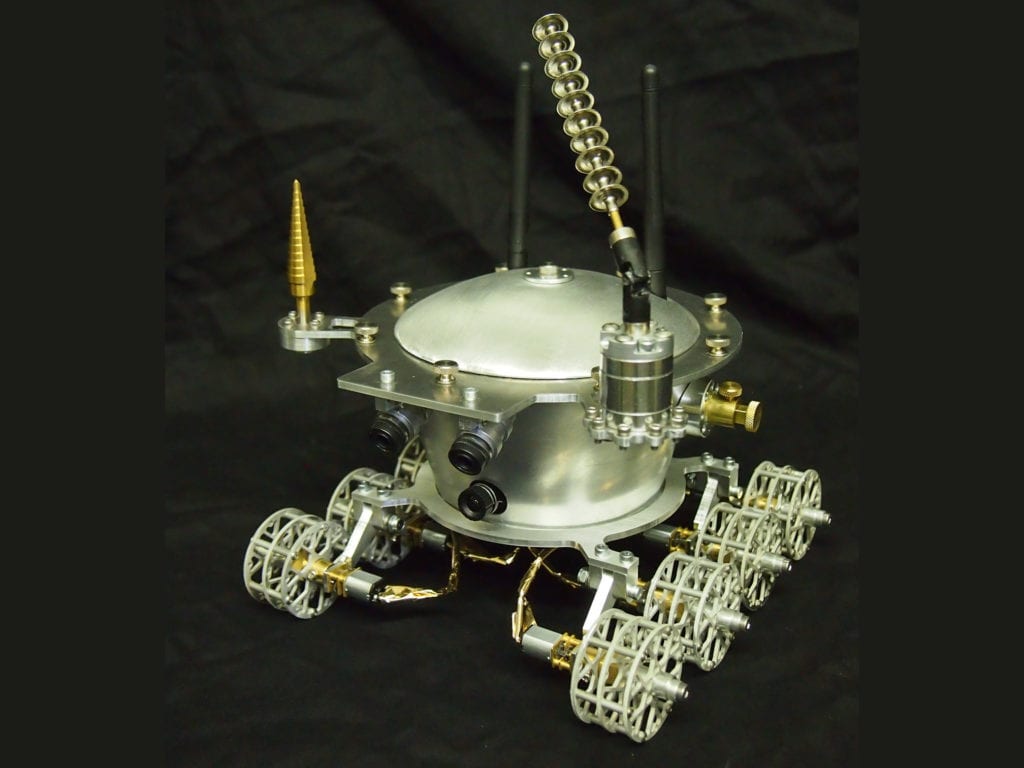
Lunokhod Front View. The black circle at the bottom is a high-definition wifi camera that provides a First Person View (FPV) to the person operating the robot.