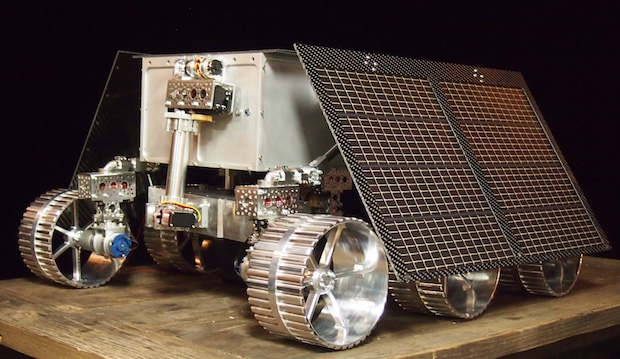
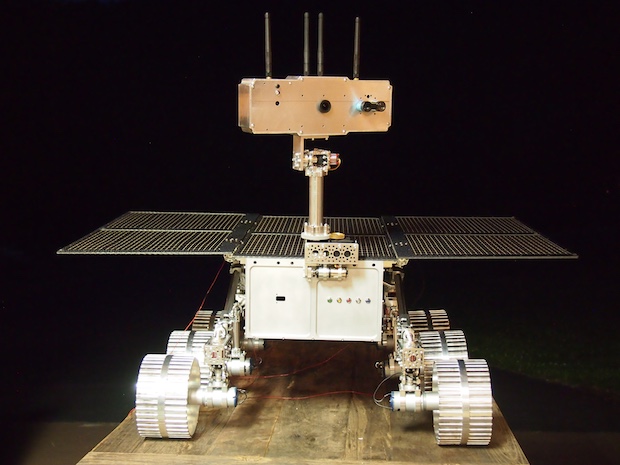
We’ve been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its “Stored Position”. When instructed to do so, the robot folds down its mast and stores it beneath the robot. The solar wings also fold down. The goal of this position is to make the robot more compact for transport on SpaceLS’s rocket. All the components of the robot are machined out of 6061 aircraft aluminum, other than the solar top and solar wings, which are machined carbon fiber.
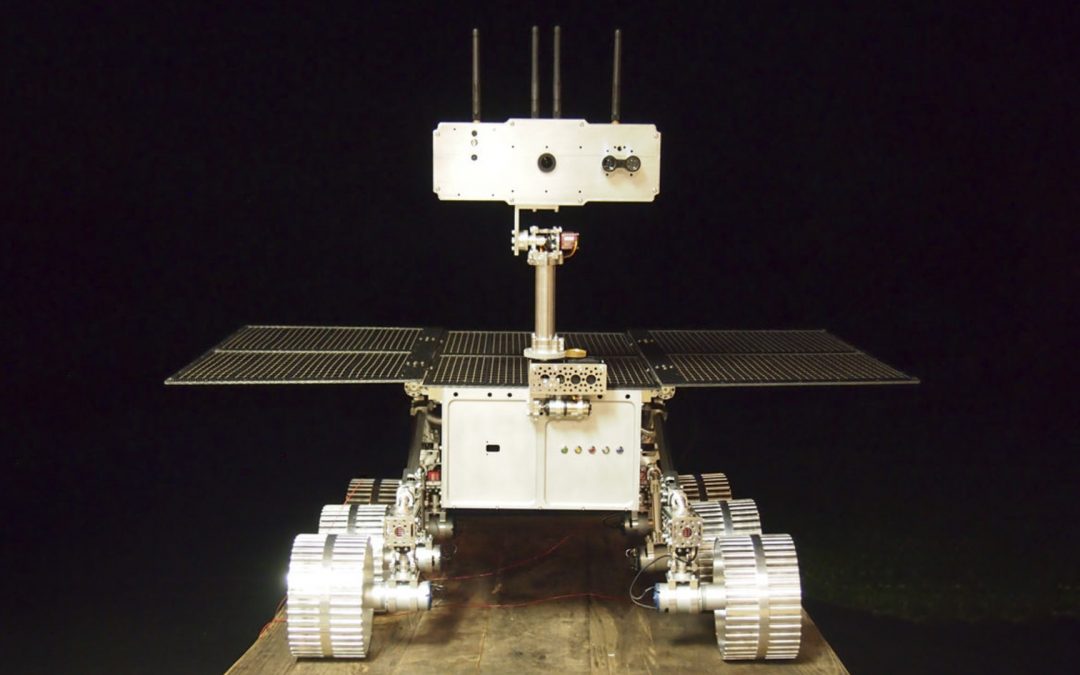
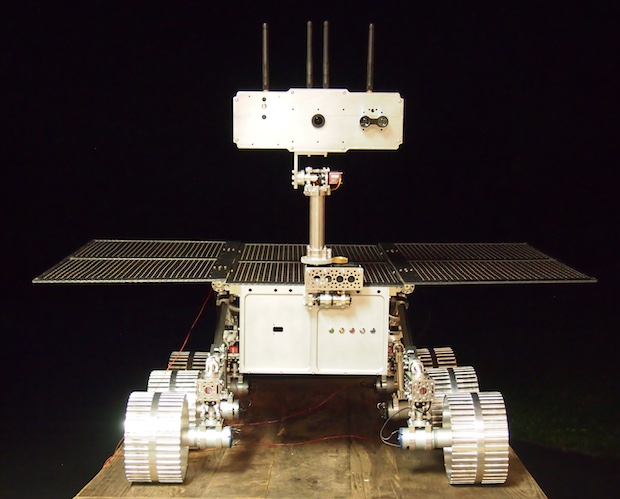
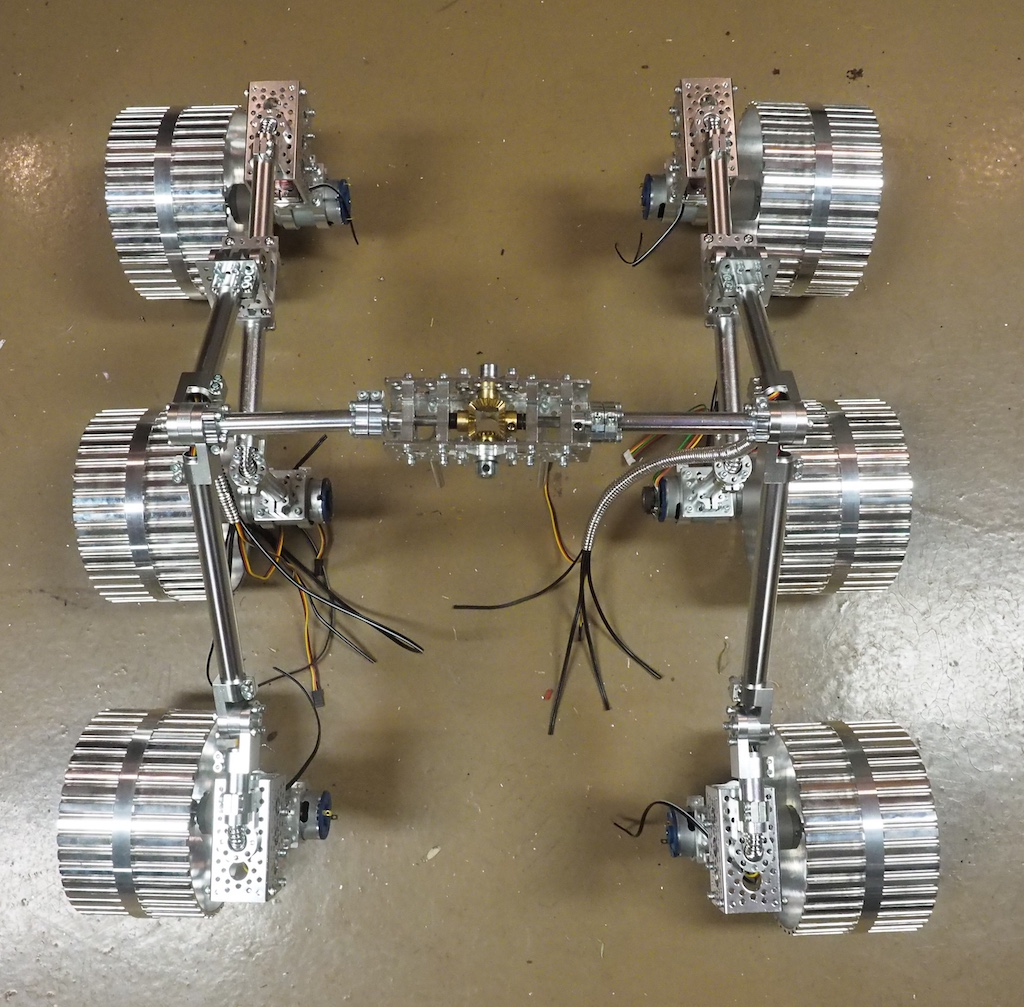
FRONT VIEW
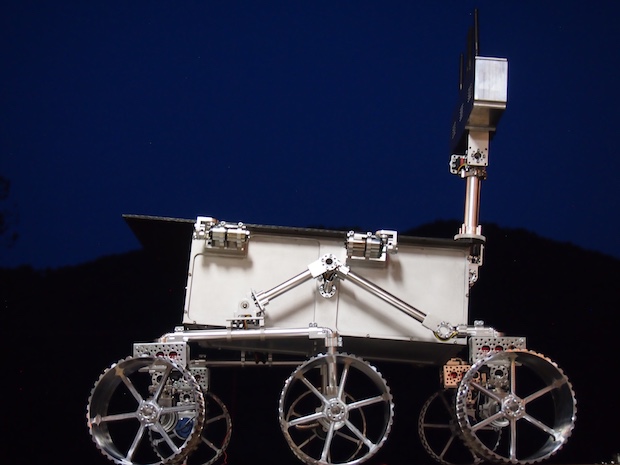
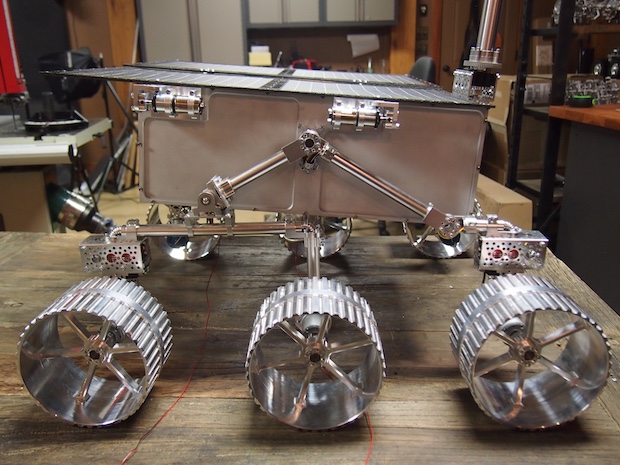
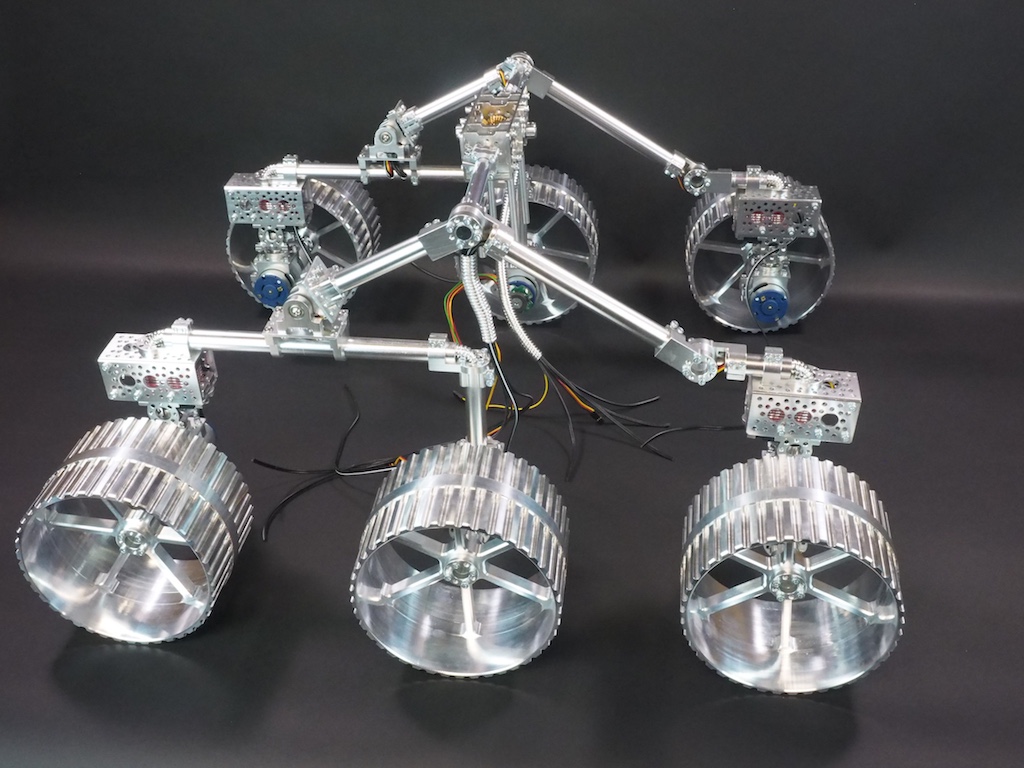
SIDE VIEW (OUR MOUNTAIN IN THE BACKGROUND)
LUNAR ROVER IN ITS “STORAGE POSITION”, WITH THE MAST AND SOLAR WINGS FOLDED
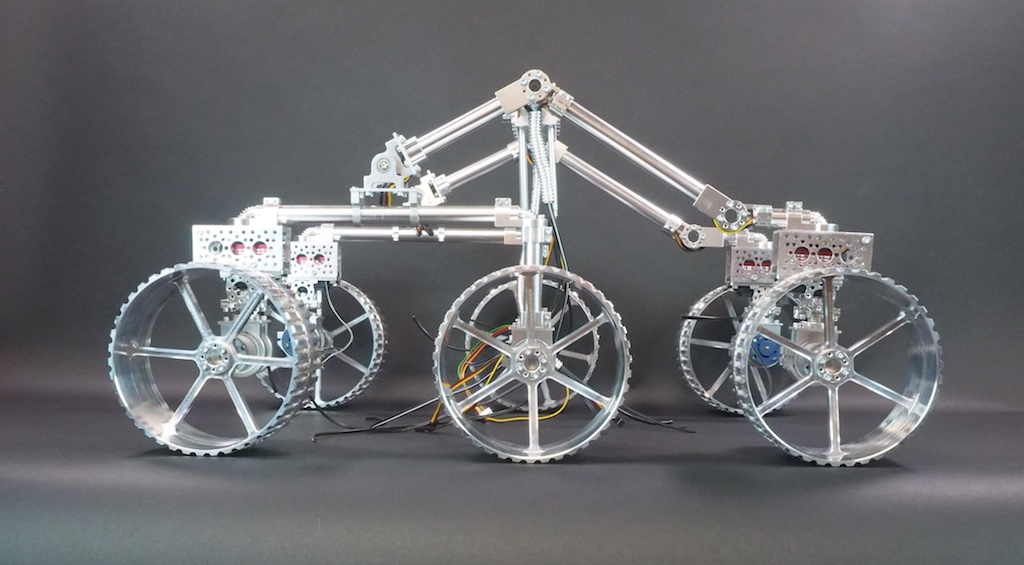
ROCKER-BOGIE SUSPENSION SYSTEM (RIGHT-HAND SOLAR WING REMOVED)
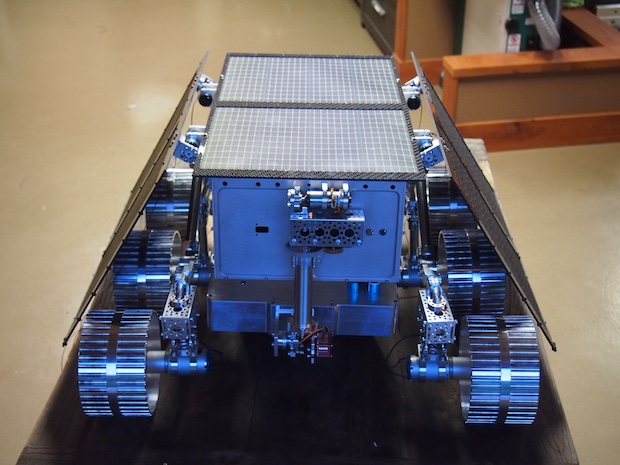
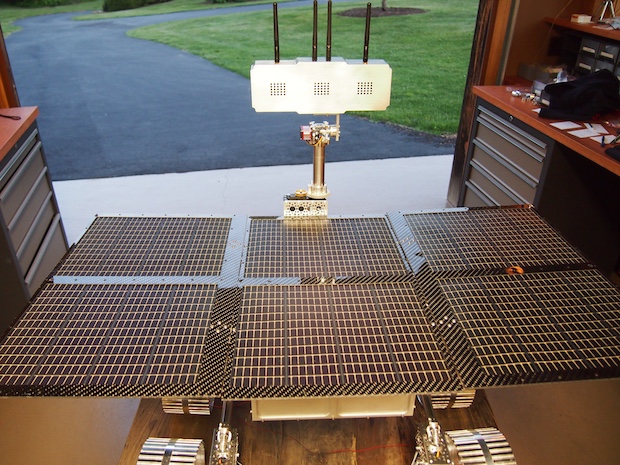
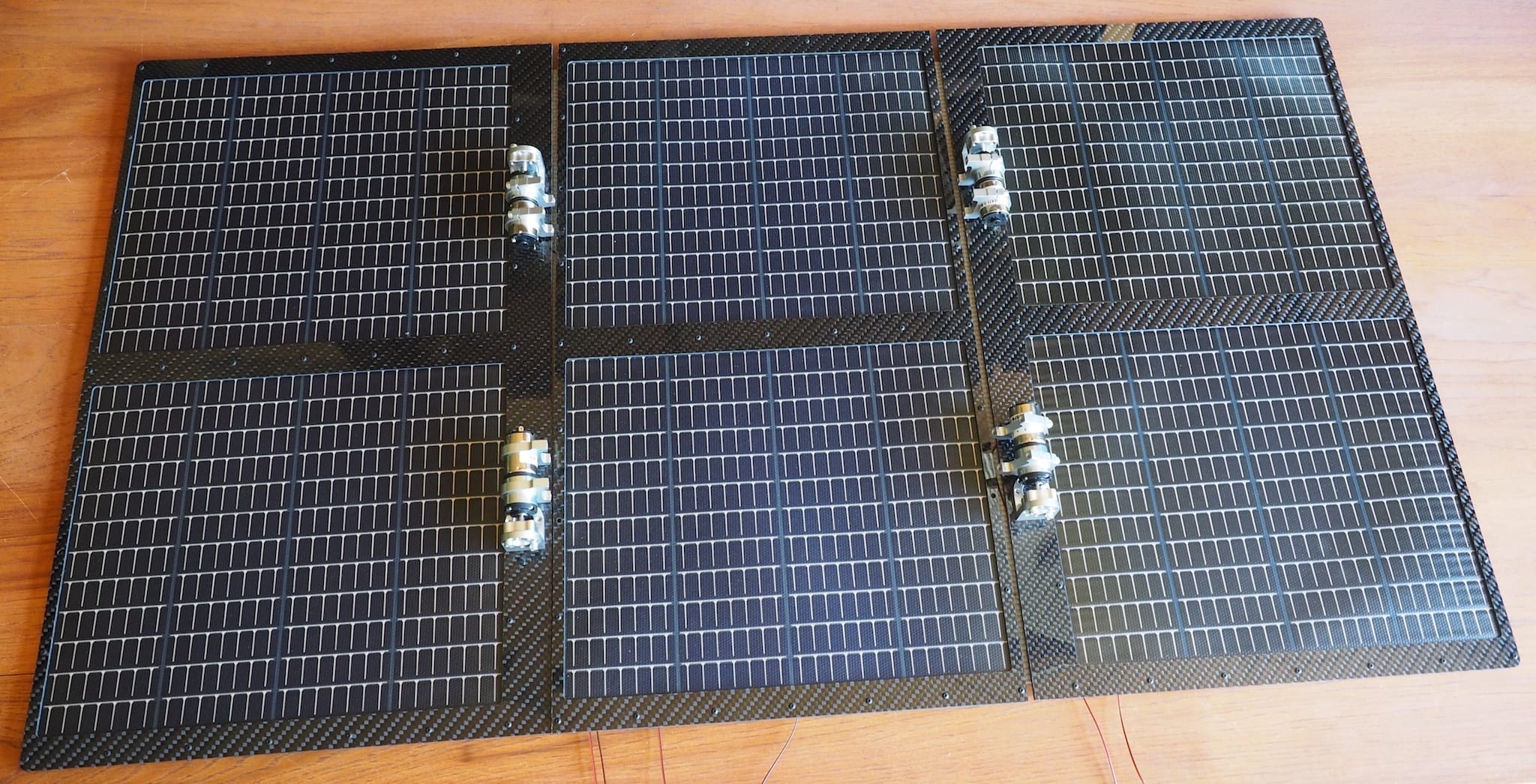
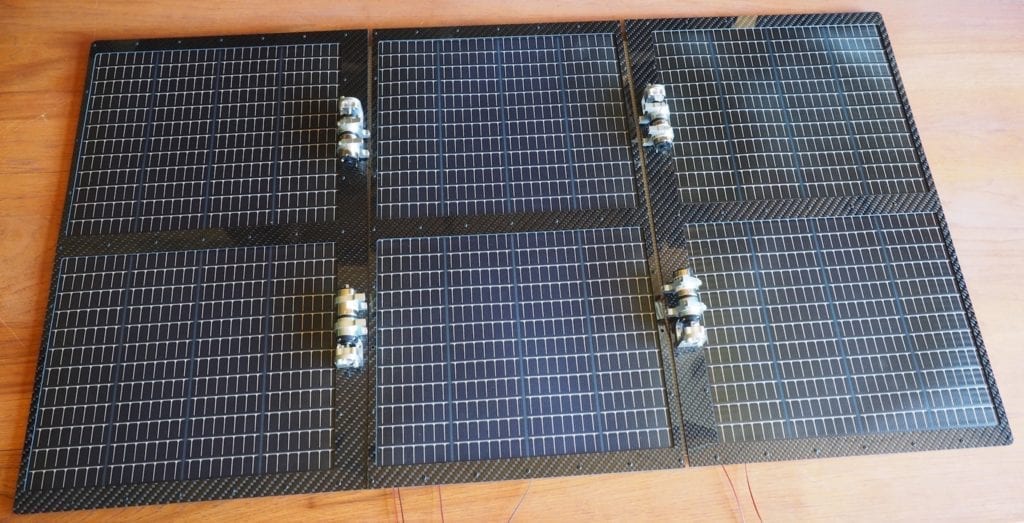
SOLAR TOP AND SOLAR WINGS (REAR TOP VIEW)
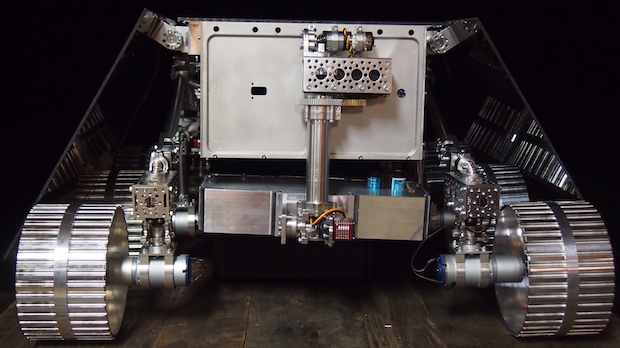
FRONT VIEW WHEN IN “STORAGE POSITION”
CORNER VIEW WHEN IN “STORAGE POSITION”
FRONT VIEW – MAST TURNED
TESTING A ROVER OF A SIMILAR DESIGN AT ASHEVILLE MUSEUM OF SCIENCE (SOLAR WINGS REMOVED) https://vimeo.com/186489953
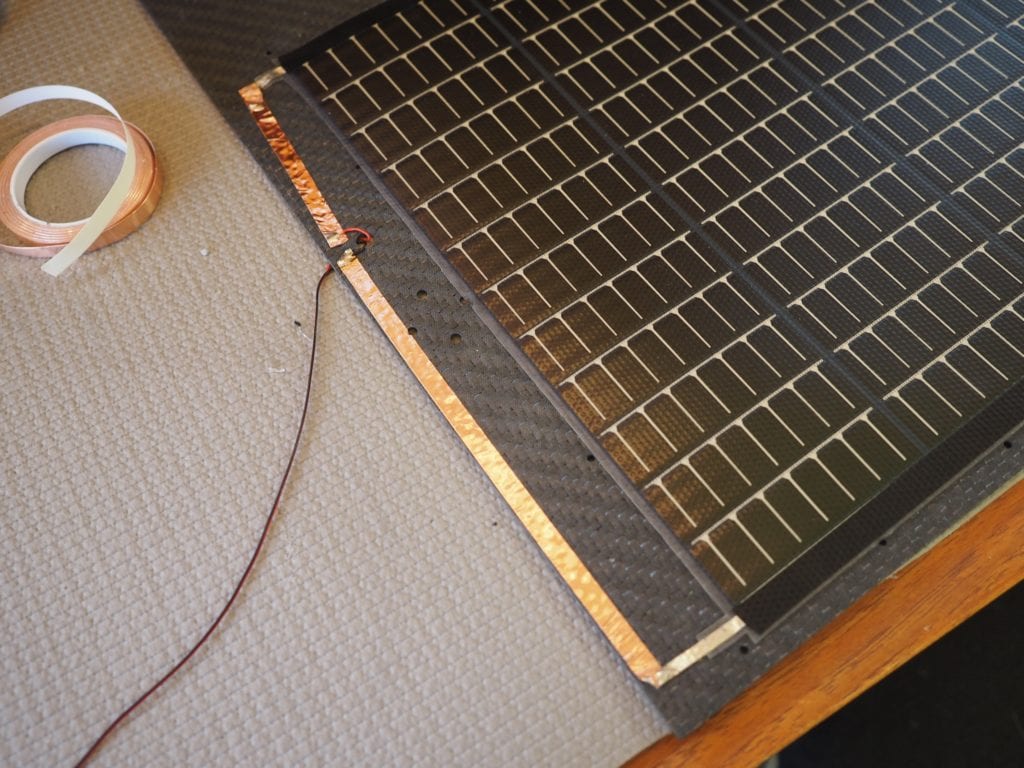
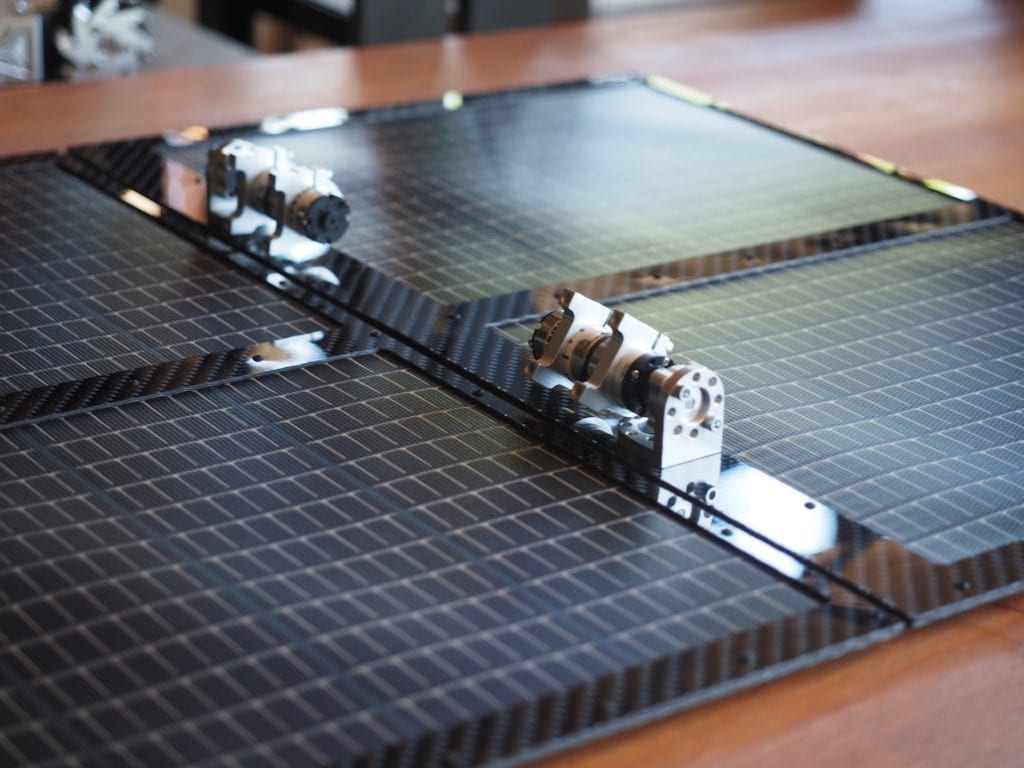
We have been working on the solar top for the Lunar Rover. The rover will use six 15.4V PowerFilm solar panels (PT15-300) to generate a total of 1.2 Amps @ 15.4V, which will be used to charge the 3-cell 12V lithium-ion battery. Each panel is 10.6″ x 12.8″. We selected the PowerFilm panels because they were thin, flexible, rugged, easy to work with, and came in a variety of shapes and sizes. We mounted the panels in between a sandwich of custom-designed, CNC-machined carbon fiber plates that we designed for the purpose. We used carbon fiber (provided by DragonPlate) because it was lightweight and rigid. The plates are held together with small, black, #2-56 screws. Because we wanted the area between the plates to be thin, we didn’t use our normal 24 AWG wire, which was too thick. Instead, we used copper conductive strip, which is flat. When mounted on the robot, two of the panels will be in the central, fixed position. There will also be a pair of panels on “solar wings” on each side. The wings will start out folded on top of the robot’s main body over the two fixed panels. When we want to deploy the solar wings, small motors will open them up like the pedals of a flower, exposing all six panels to the sun. This design allows us to keep the robot compact for transport, but have three times the surface area and therefore three times the current for charging the batteries.
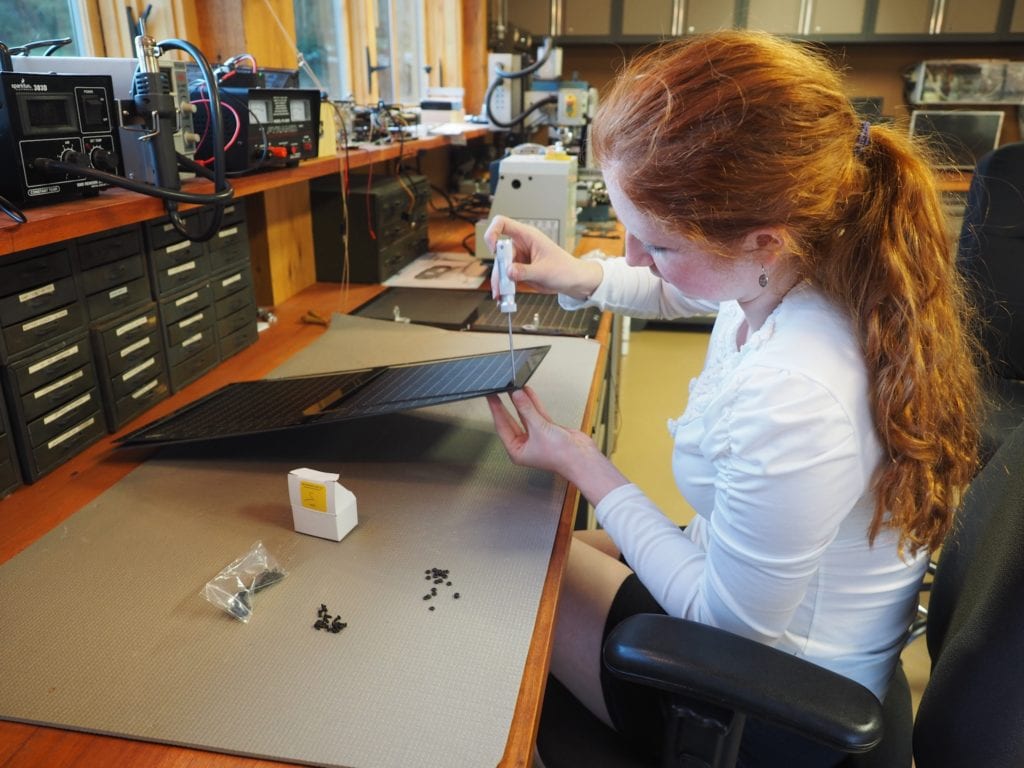
ASSEMBLING THE SOLAR PANELS BETWEEN THE CARBON FIBER PLATES
WE USED CARBON FIBER TO MINIMIZE WEIGHT, BUT MAXIMIZE RIGIDITY IN THE SOLAR WINGS
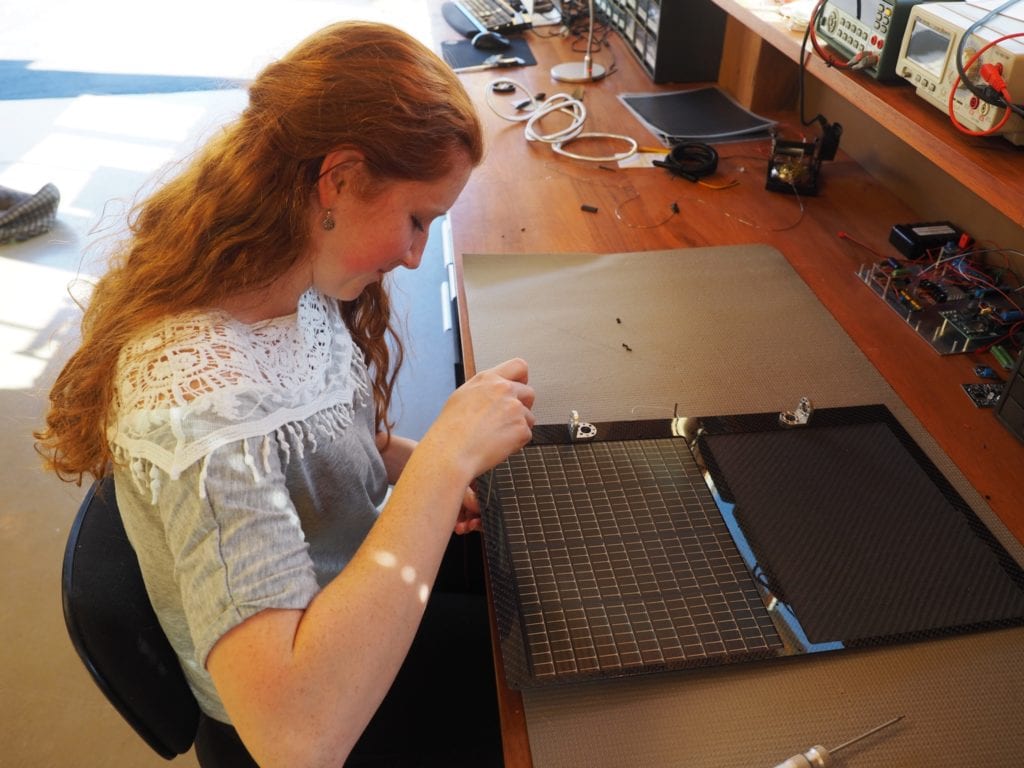
TO KEEP IT FLAT, WE USED CONDUCTIVE COPPER STRIP RATHER THAN WIRES. THE “FINGERS” (SHORT LINES) OF THE SOLAR PANEL POINT TOWARD THE NEGATIVE SIDE. THE “KNUCKLES” ARE ON THE POSITIVE SIDE.
WHEN THE SOLAR WINGS ARE MOUNTED ON THE ROBOT, THESE SMALL MOTORS WILL BE USED TO OPEN THE WINGS
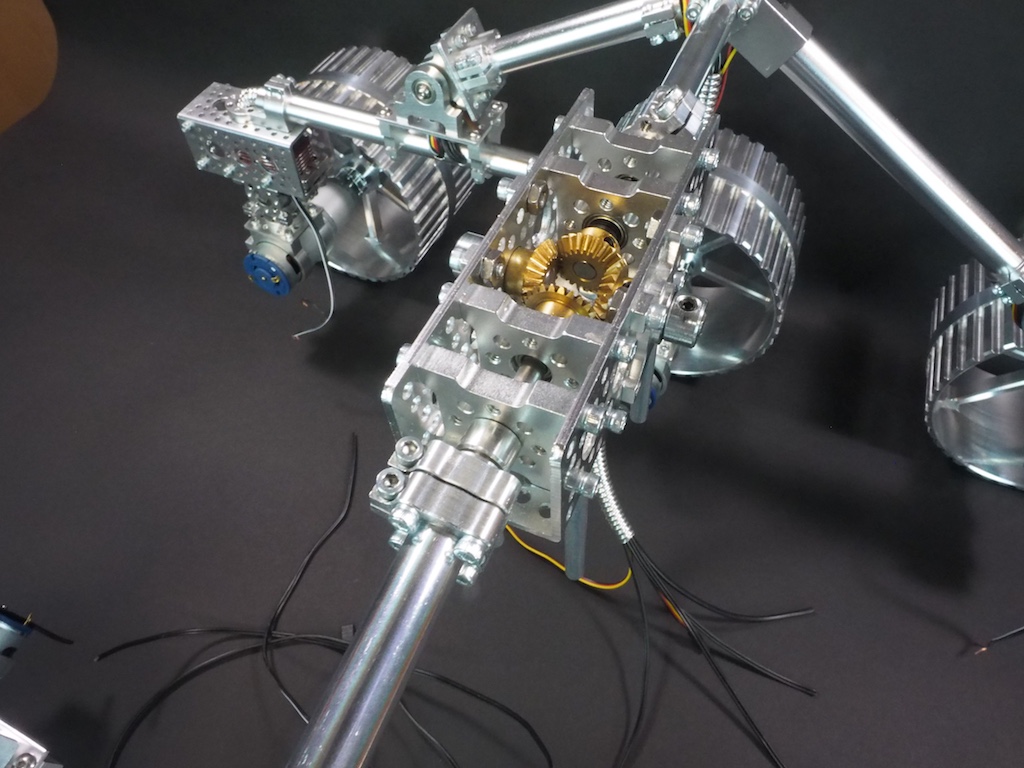
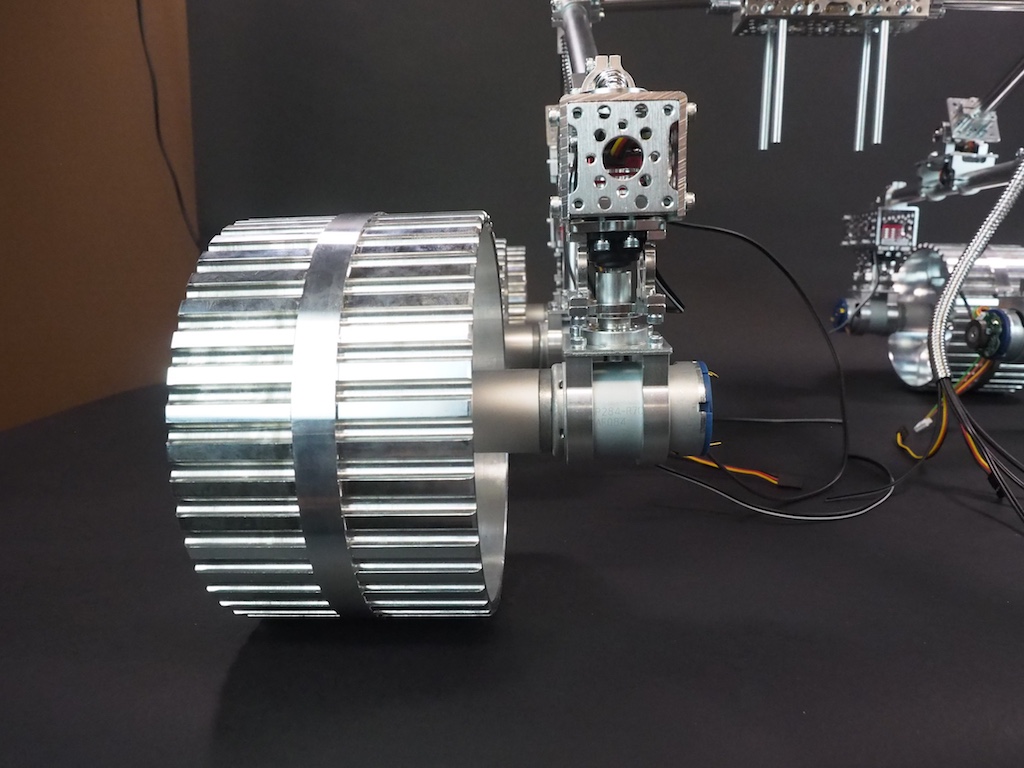
SpaceLS, a rocket company in the UK, has asked Beatty Robotics to team up with them to pursue a mission to put a rover on the moon. The first step in the process is for Beatty Robotics to design and construct a prototype for SpaceLS to use for testing, experimentation, and development. We’ve been working hard on the project, but we’ve been so busy we haven’t had time to take any pictures until now! Here are our first photos of the Lunar Rover’s rocker-bogie suspension system, counter rotating universal joint, steering servos, motors, and wheels. We designed the wheels to be large (6+” diameter) and wide for traveling through lunar ash. All the components of the robot will be machined out of aluminum, titanium, and carbon fiber. When it’s done, the robot will be solar powered and run on an Intel Edison. These are work-in-progress photos. The robot’s core/body, solar panels, video/sensor mast head, and other components are not shown.