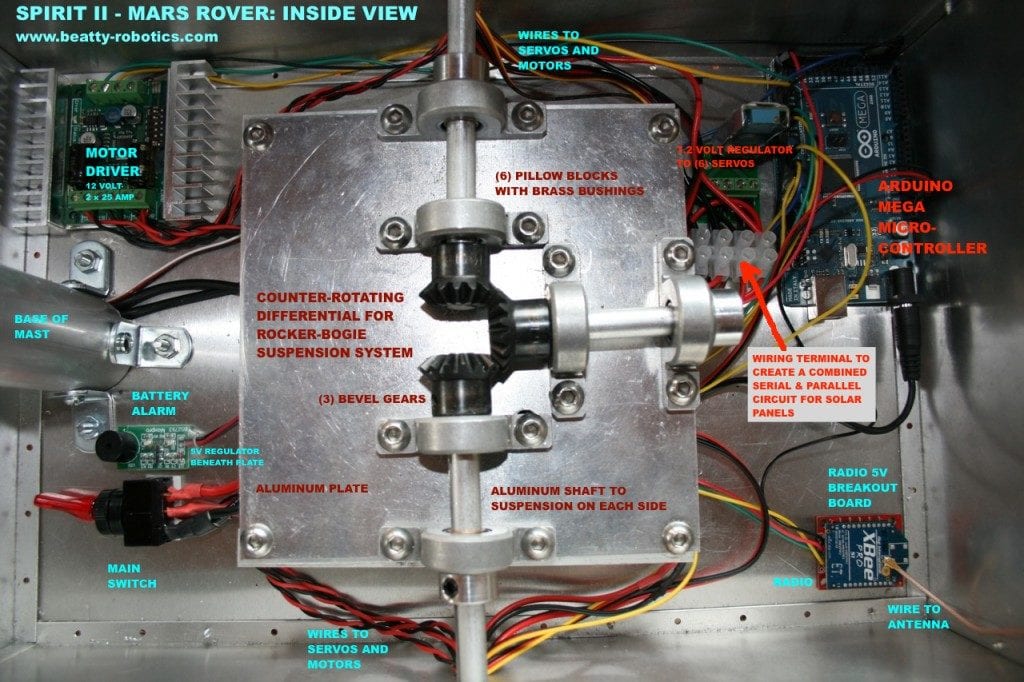
Several readers have requested an inside view of our Spirit II – Mars Rover so that they can see what the electronics look like. We have provided an annotated picture below, along with a couple of external shots.
We are currently building a rover similar to the Mars Rovers Spirit and Opportunity, which we have always loved (but have been way outside our skillset in the past).
We have been studying the details of the rovers, their electrical systems, chassis, wheels, and so on. Ours won’t be exact, of course, but hopefully, if all goes well, it will be a nice working model, including the solar panels.
One of the most unusual and characteristic elements of the Mars Rover design is what they call a rocker-bogie suspension system (http://en.wikipedia.org/wiki/Rocker-bogie), which is intended to help the rover go over rocks. This system involves six wheels, with a special interconnection between the various wheels so that at least one or two of the wheels on each side are on the ground at any one time, even when going over obstacles. It took a while to figure it out, but this design requires a connection between the wheels and each side such that when the wheels on one side go up over a rock the wheels on the other side go down and vice versa. NASA uses what they call a “differential” (although it’s not the same as a car differential).
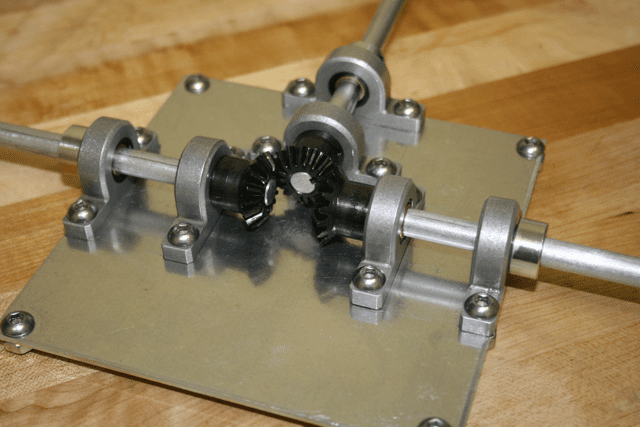
Anyway, we couldn’t find a counter rotating differential that met the requirements, so we decided to make made one. We’ve attached a picture. The plate, pillow blocks, and shafts are made out of aluminum. There are three bevel gears, which are made out of steel. This gear box will go inside the center of the robot’s main box directly between the wheel sets on each side. The way we’ve meshed the gears together creates a counter rotating shaft so that when one side goes up the other side goes down.