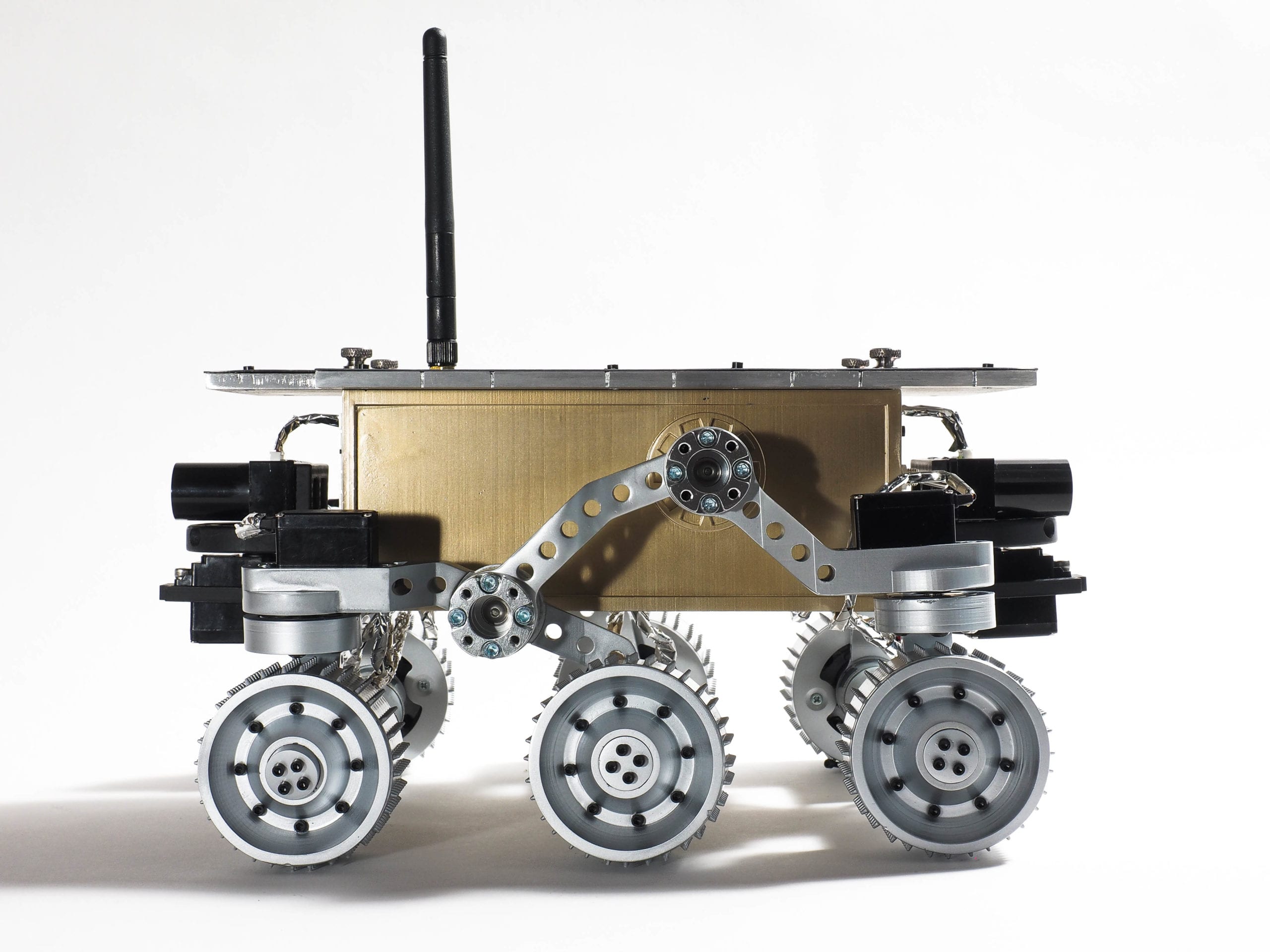
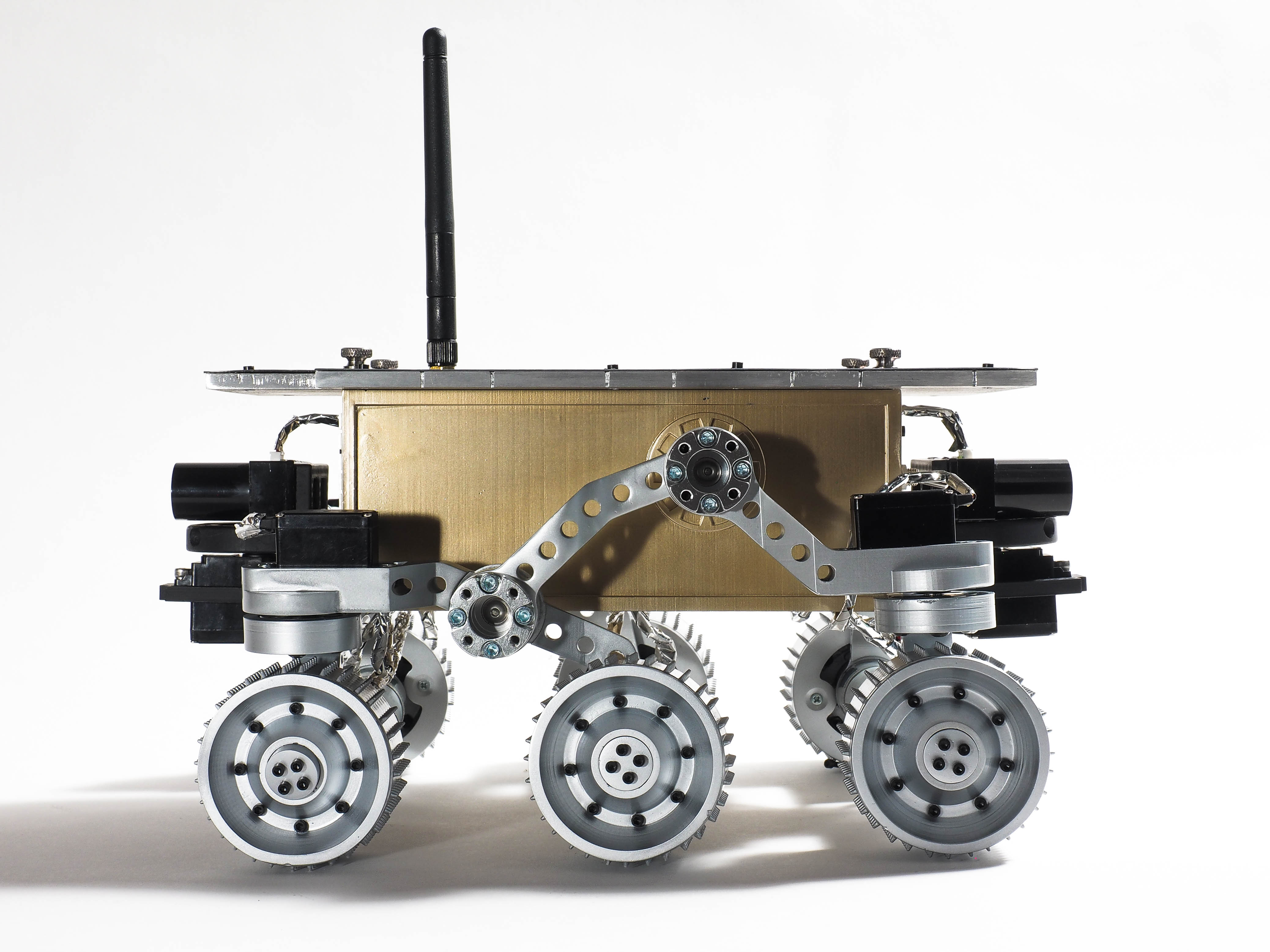
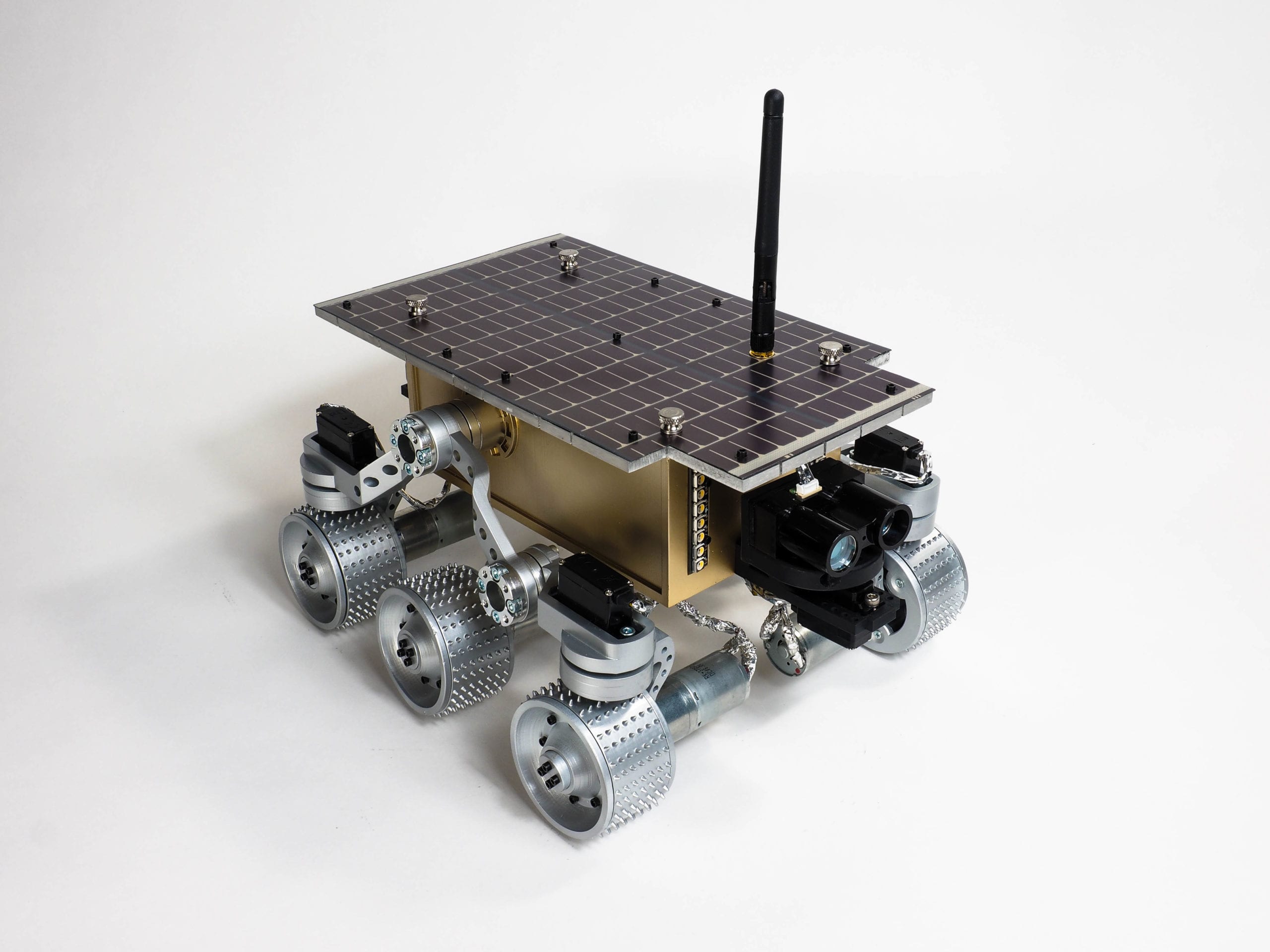
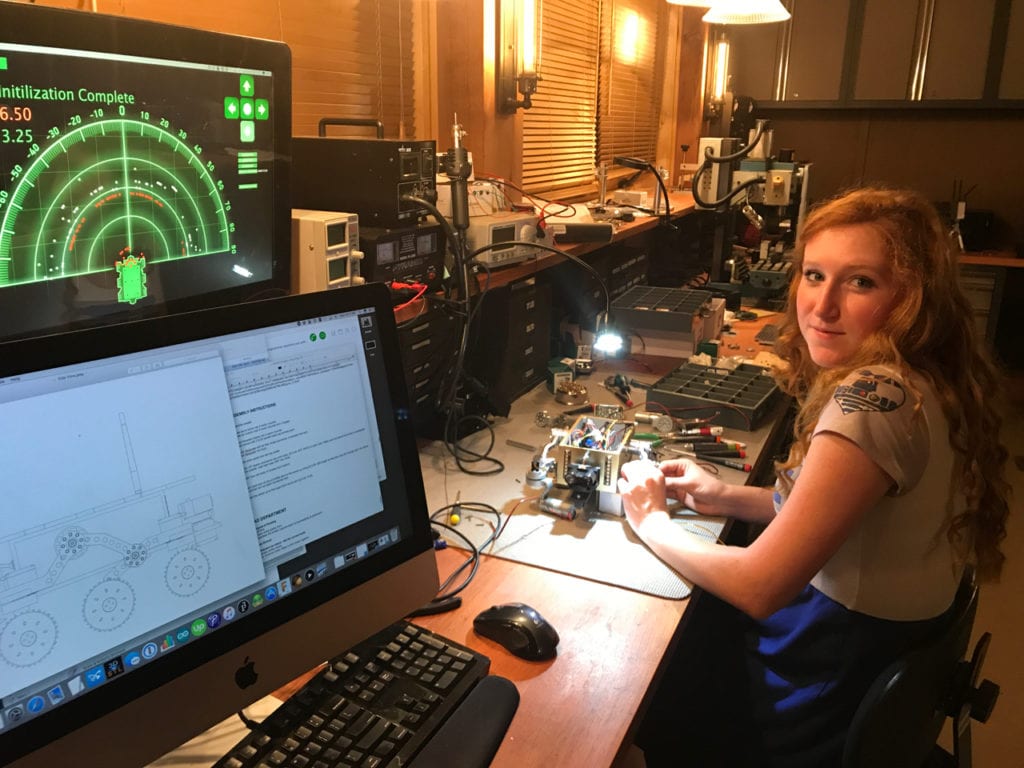
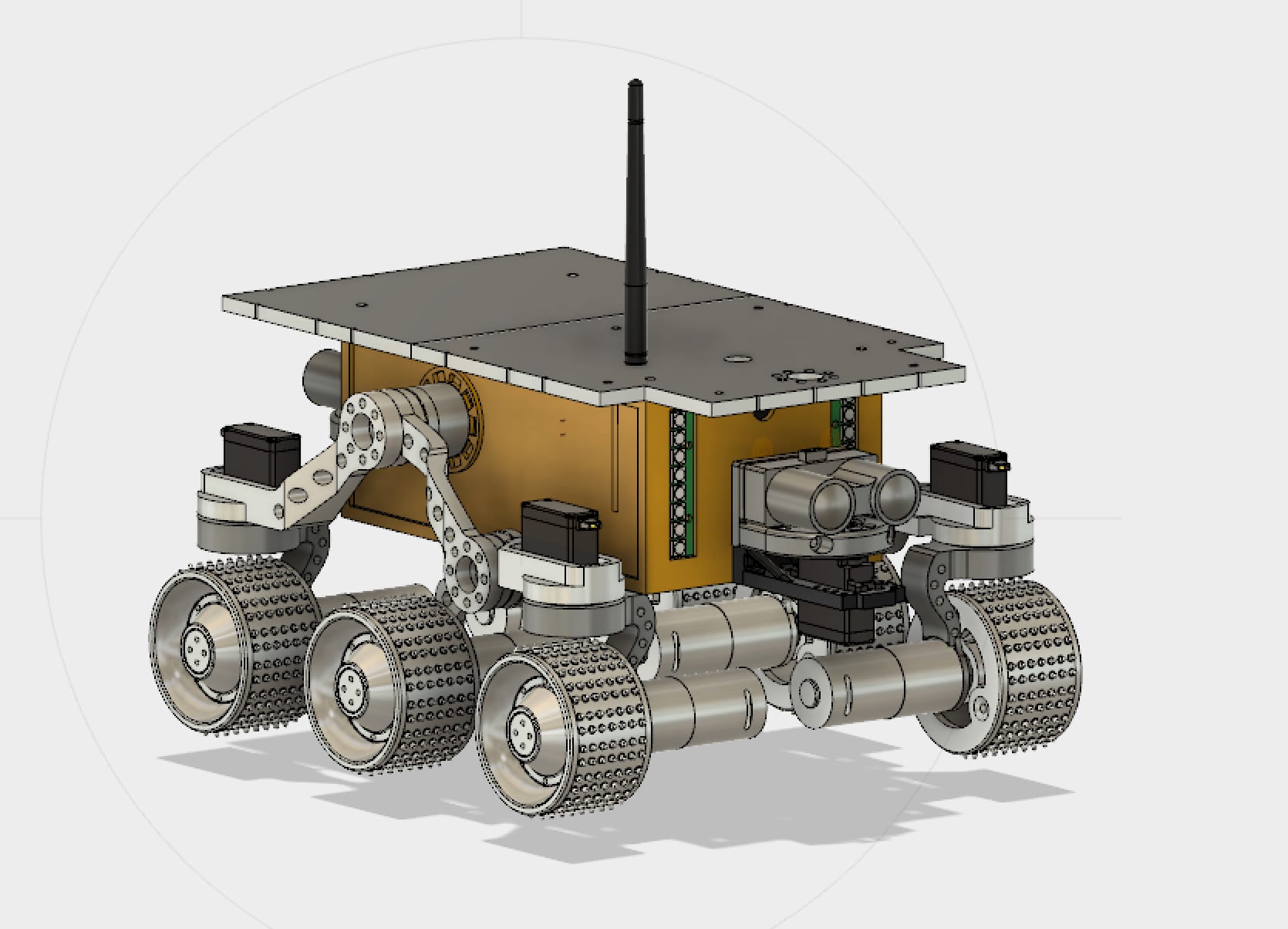
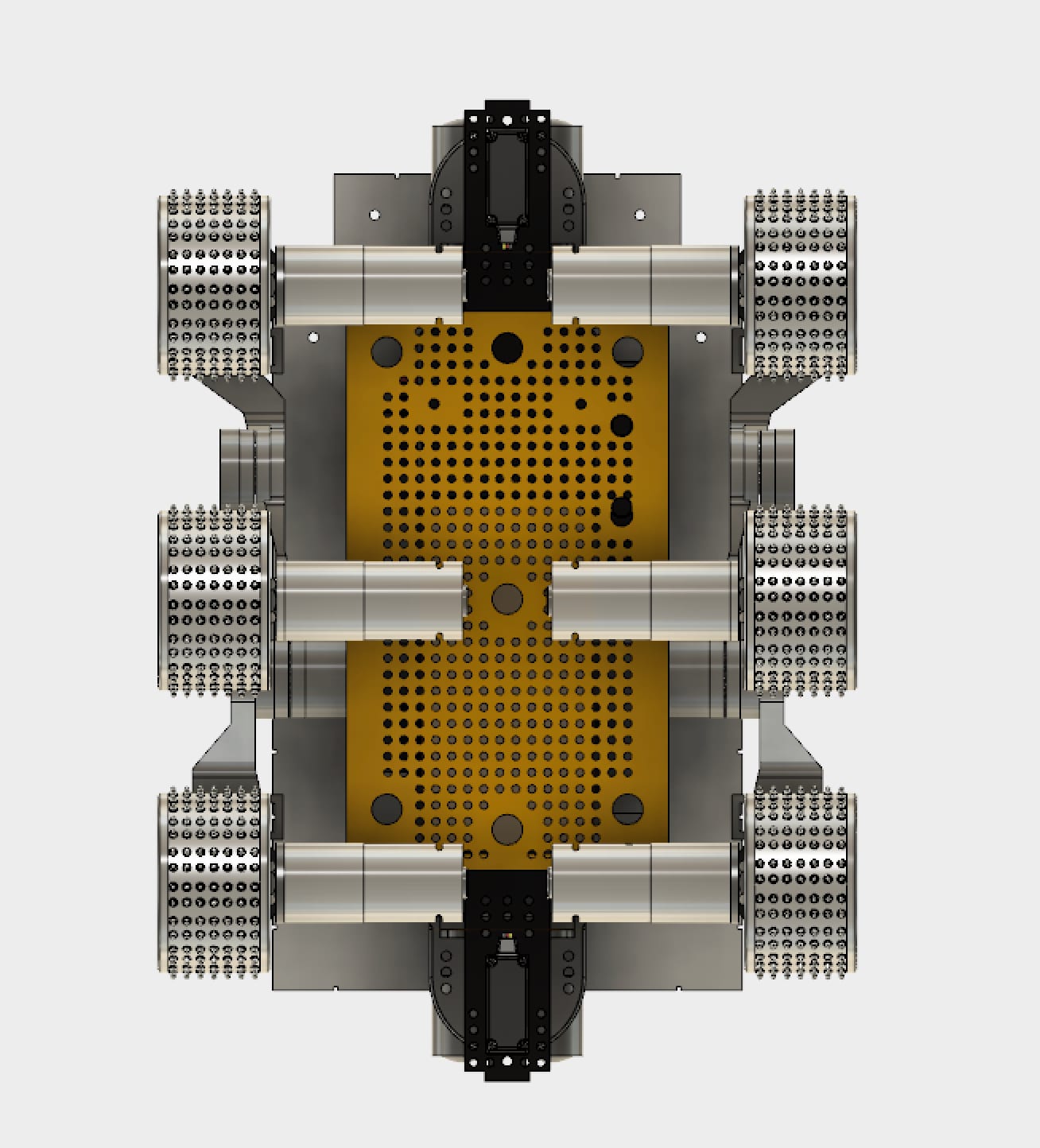
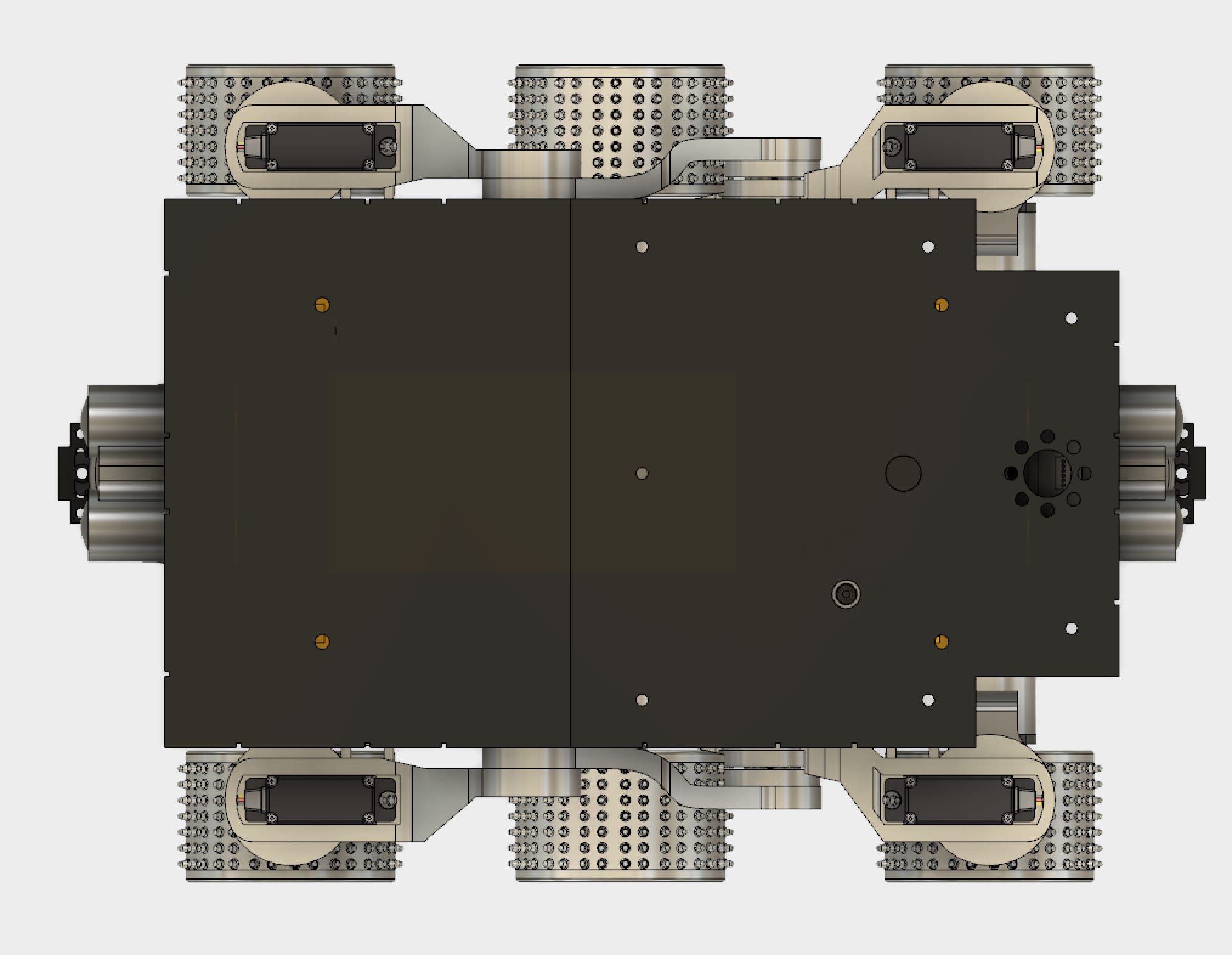
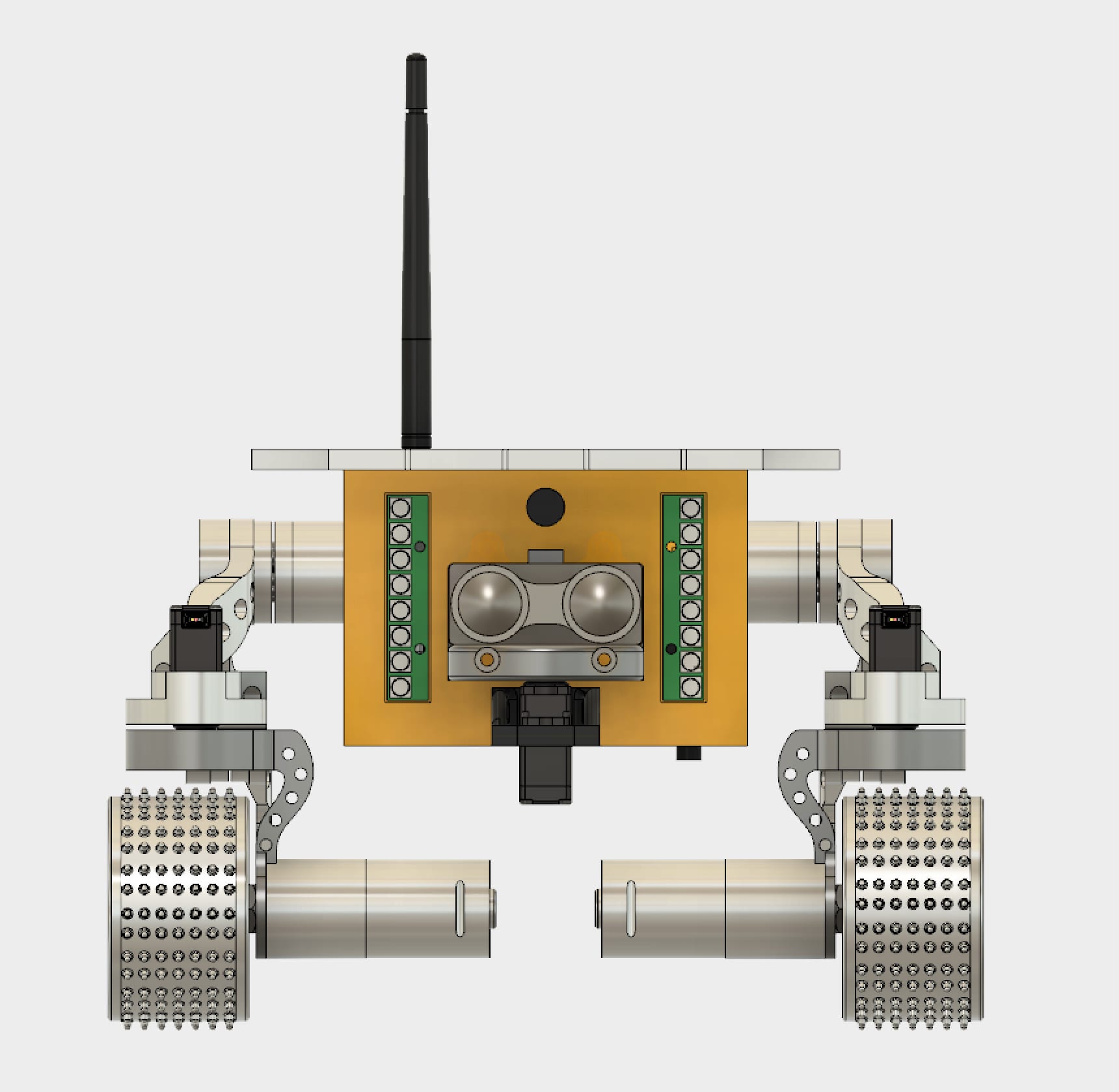
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first robot to operate on an different planet. Like the real Sojourner, our little robot includes six wheels, rotational servo steering, a fully-functional rocker-bogie suspension system, solar panels, a large main antenna, lithium battery, a “warm box” to protect its electronics, a video camera, and a host of other components. We built our Sojourner in 1/2 scale because it is intended to be used in interactive exhibits in space museums where space is limited. Here are some photos of the robot, followed by work-in-process photos from the workshop, our CAD models, and two images of the real Sojourner for comparison purposes.
We worked hard on the inside of the robot as well. It contains a new thing we’ve put together that we call “The Core”. The Core is a stack of integrated electronics that includes an Arduino Zero, a Servo Shield for controlling the robot’s 8 servos, a custom shield we’ve developed, and a high-powered Motor Controller. We think it’s interesting that the real Sojourner used an 8-bit microcontroller that ran at 2 MHz. Our Sojourner robot uses a 32-bit Cortex M0+ processor running at 48 MHz. In other words, our Sojourner is far more powerful than the real NASA Sojourner. That’s crazy! A lot has happened since 1997!
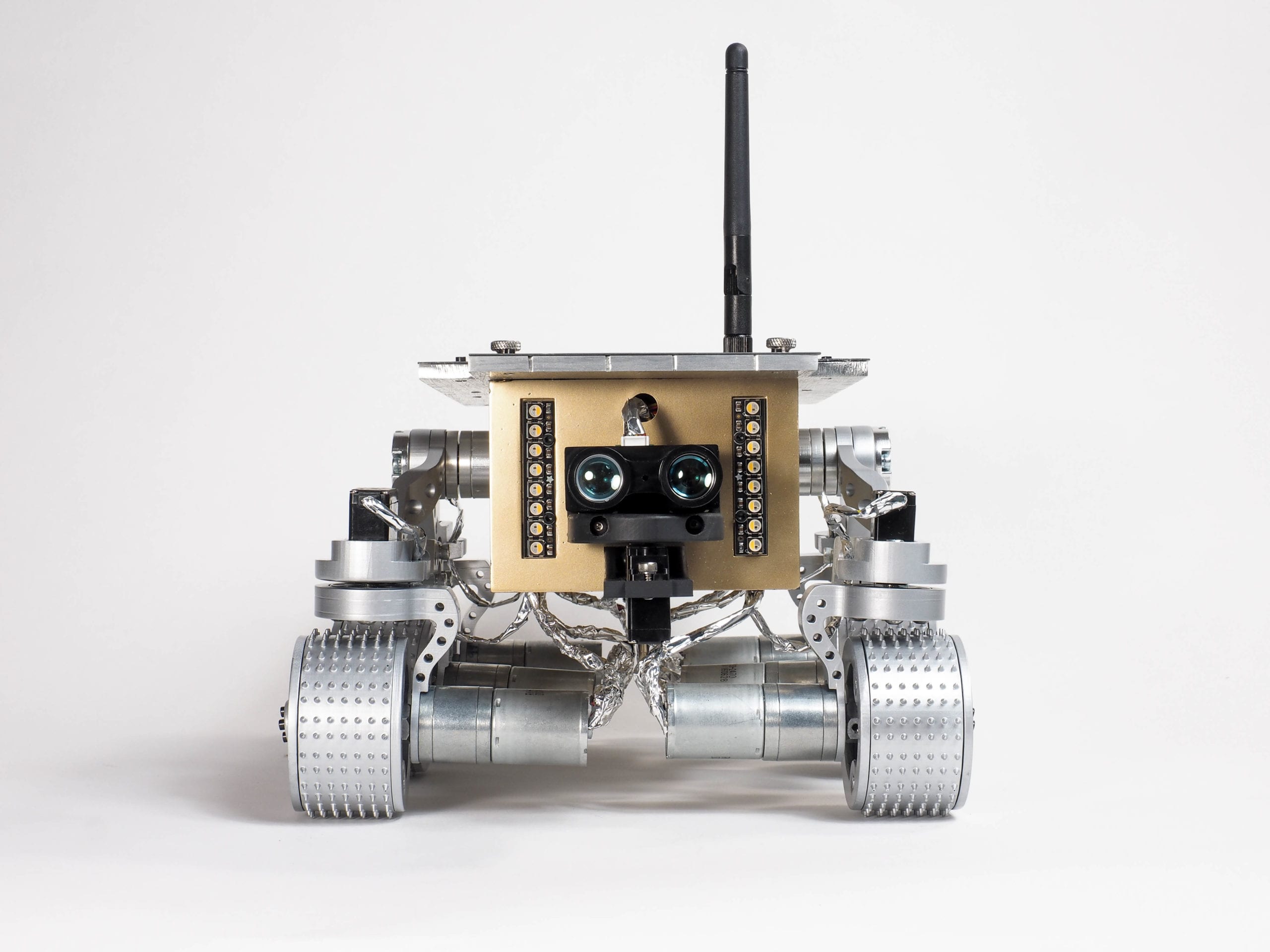
You may notice that Sojourner is equipped with a servo-mounted laser range finder (LIDAR) on the front and back. As the servo sweeps through 180 degrees, the LIDAR unit shoots out a laser to determine the distance to the nearest object at each degree. This is used for obstacle avoidance and autonomous navigation. Sojourner is also equipped with an HD camera that streams FPV video back to video goggles and/or computer monitor.
Sojourner is equipped with an Xbee radio for transmitting to and receiving from a computer control station. Sojourner is capable of exploring autonomously, or taking a “Command Sequence” (a series of user-programmed movement commands), or real-time manual Remote Control.
This is a small little robot, but it’s become one of our favorites. In future posts, we’ll share some video of Sojourner in operation, a description of the control software, and the details about the new shield we’re working on.
We would like to thank Arduino, Actobotics/ServoCity, Adafruit, Pololu, Ion Motion, and the other companies that provided many of the components. We would like to give special thanks to Dan Kreisher for helping us with the CAD modeling on Fusion 360.
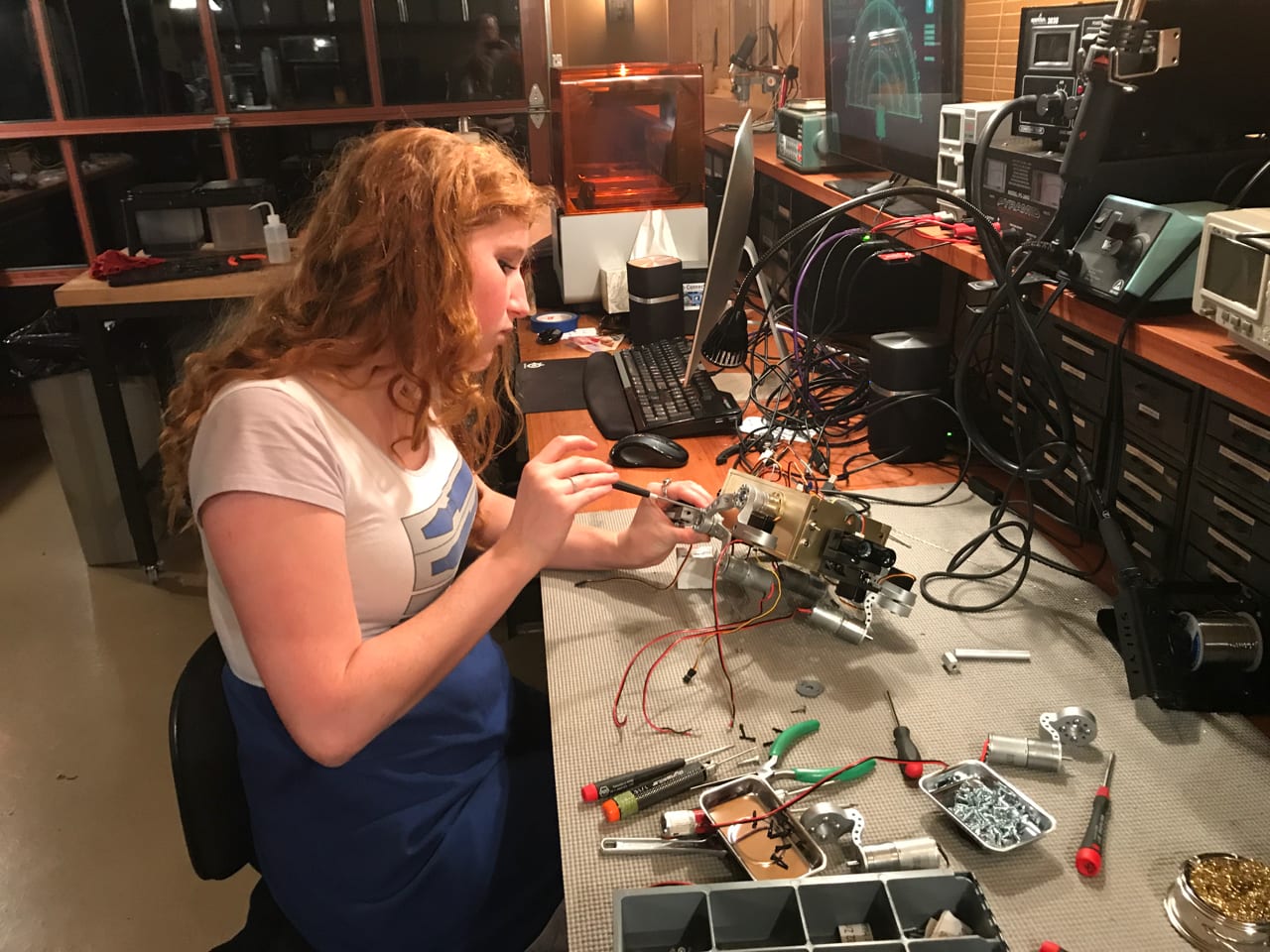
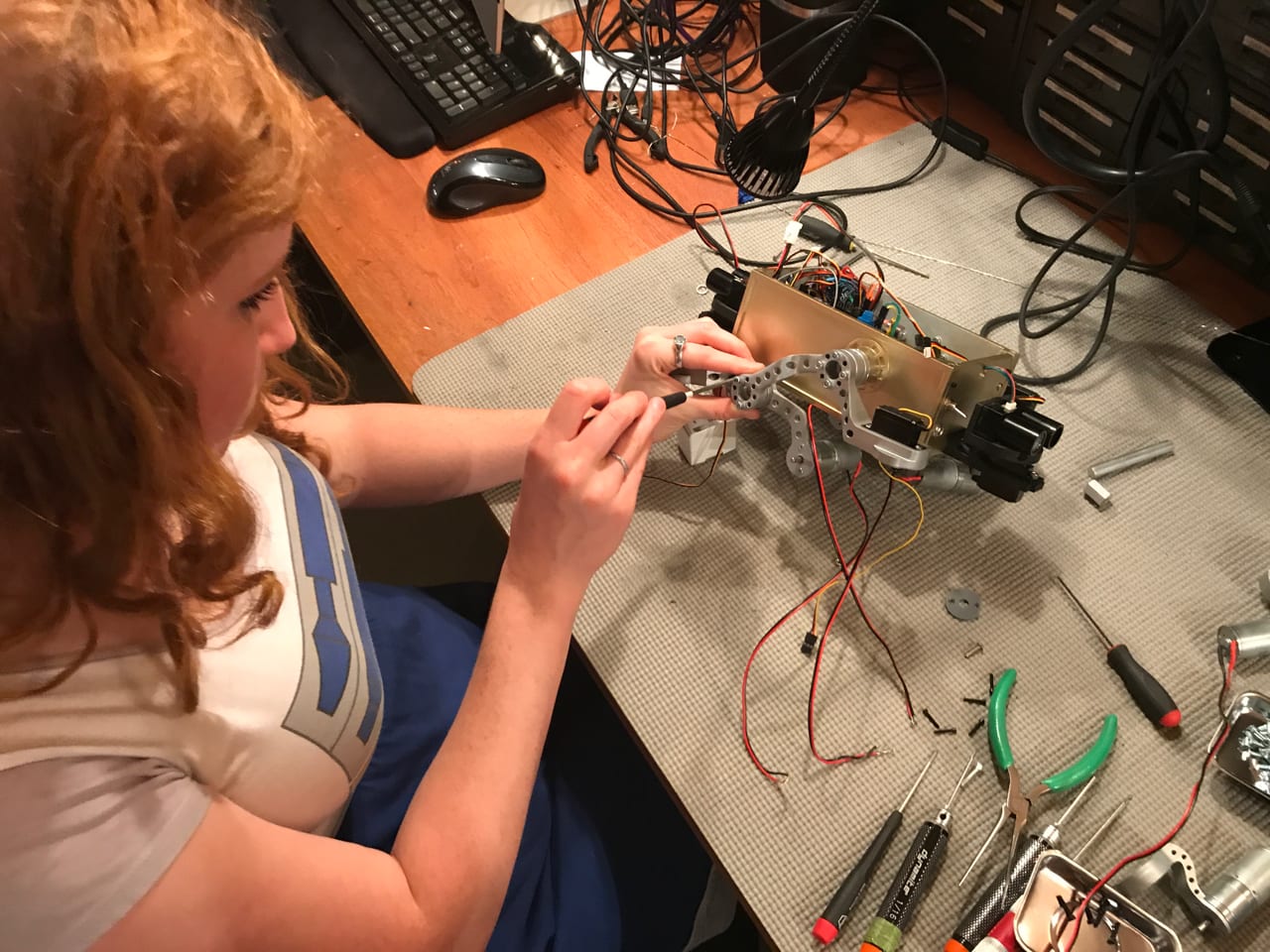
WORK-IN-PROCESS SHOTS
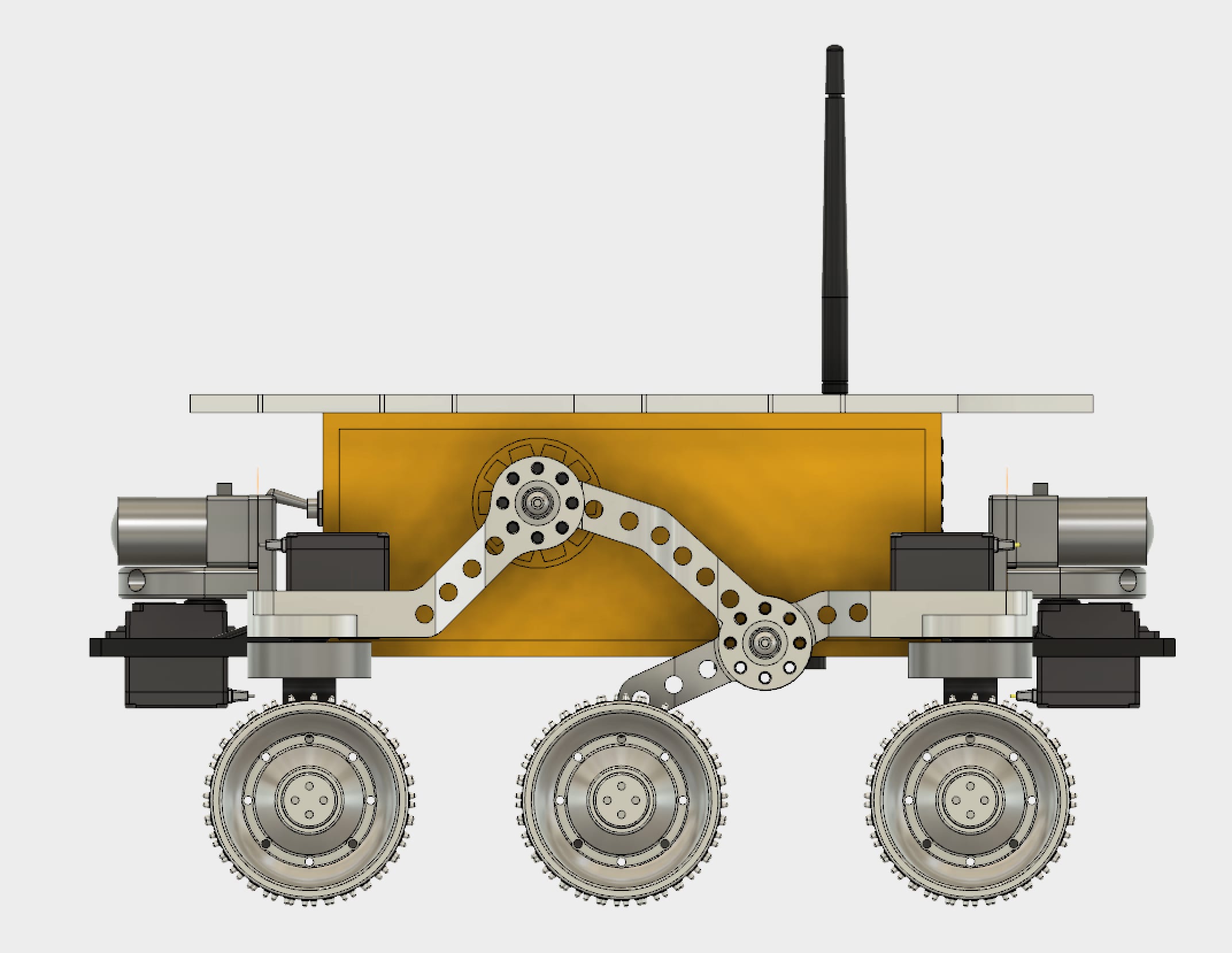
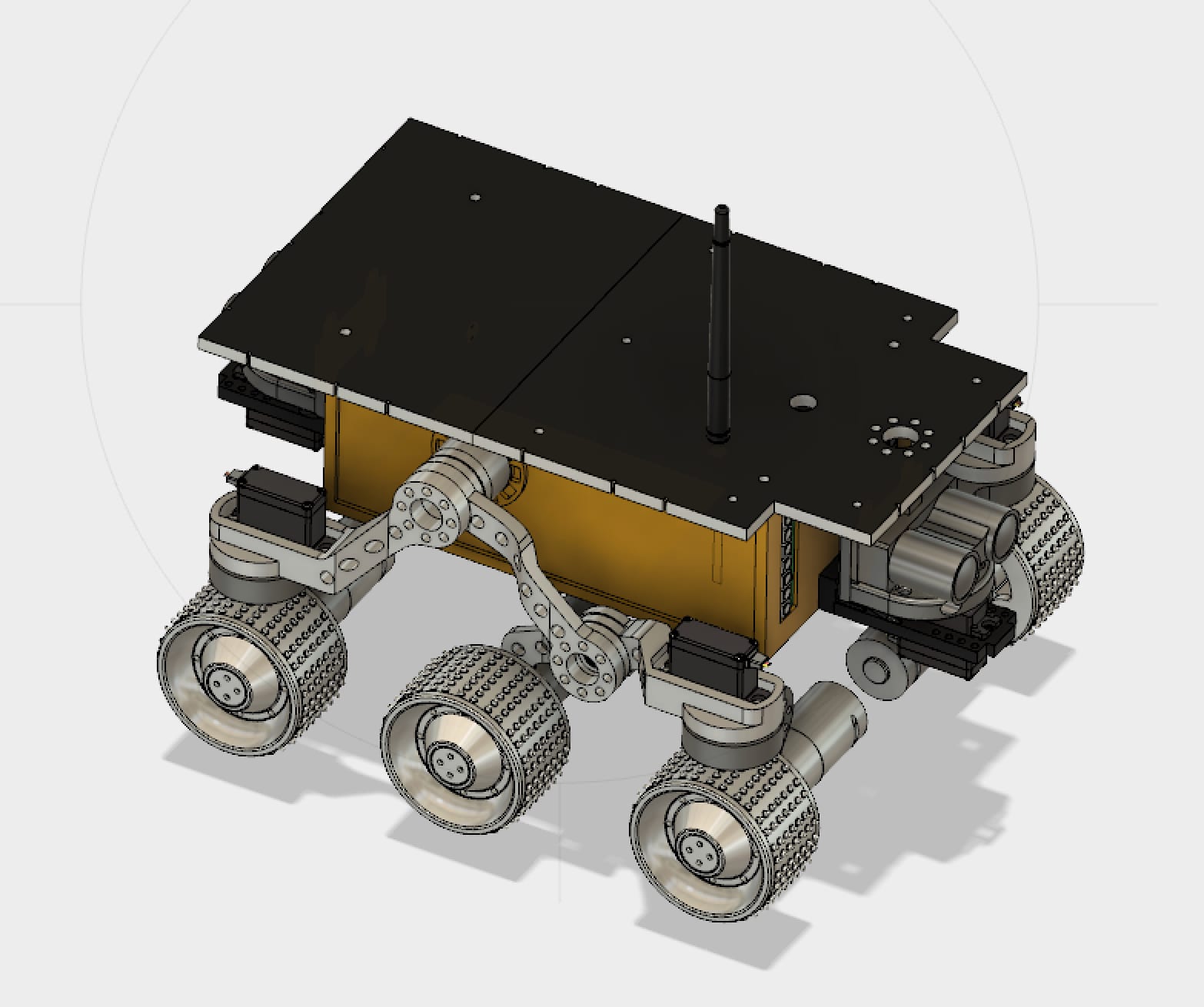
THE BEATTY ROBOTICS 3D CAD MODEL OF SOJOURNER
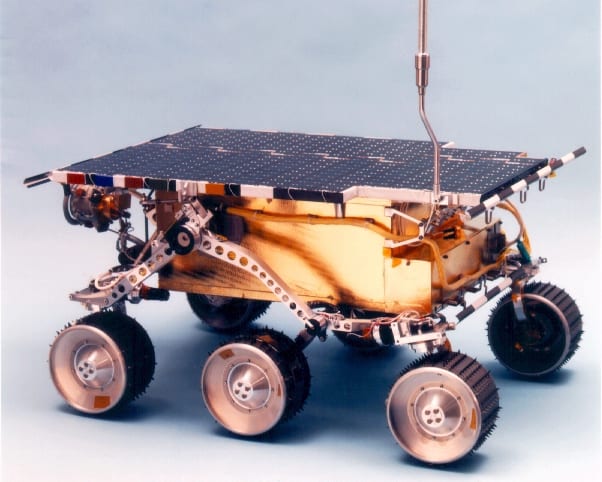
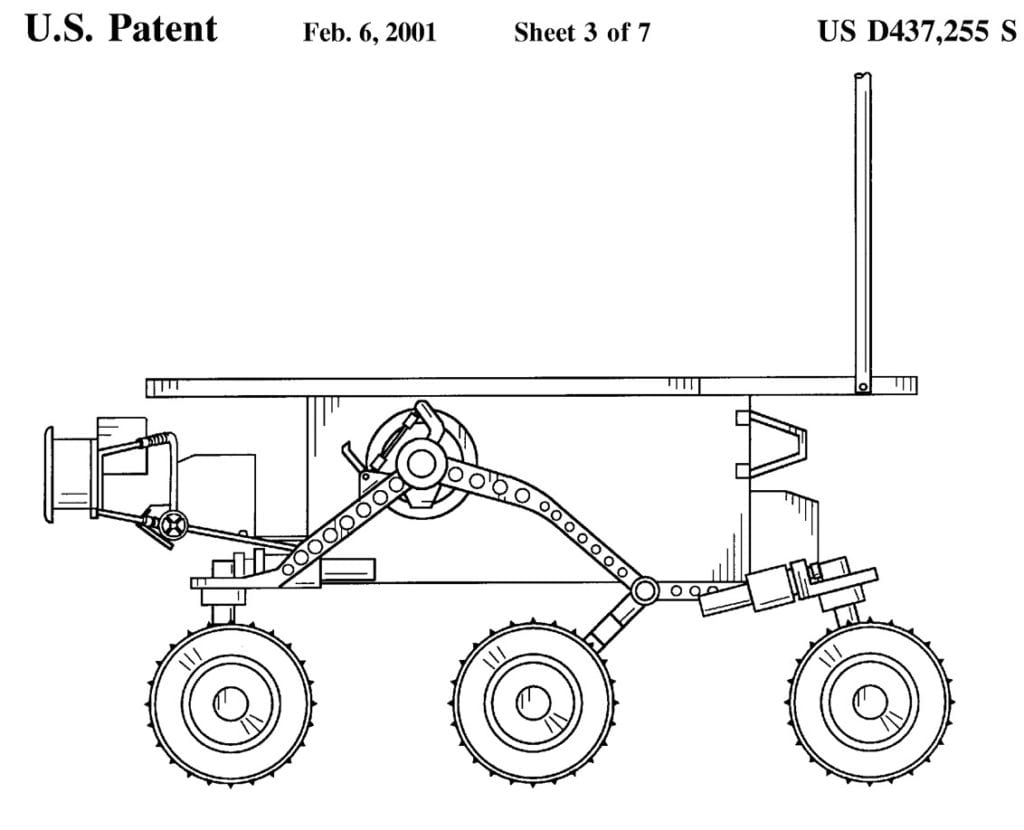
THE FOLLOWING PHOTOS SHOW THE ACTUAL NASA SOJOURNER ROVER
(Please note that the robot’s tread’s look blackish in this photo, but in reality the machined aluminum wheels had sheet-metal teeth, not rubber. Rubber would freeze and shatter on Mars)
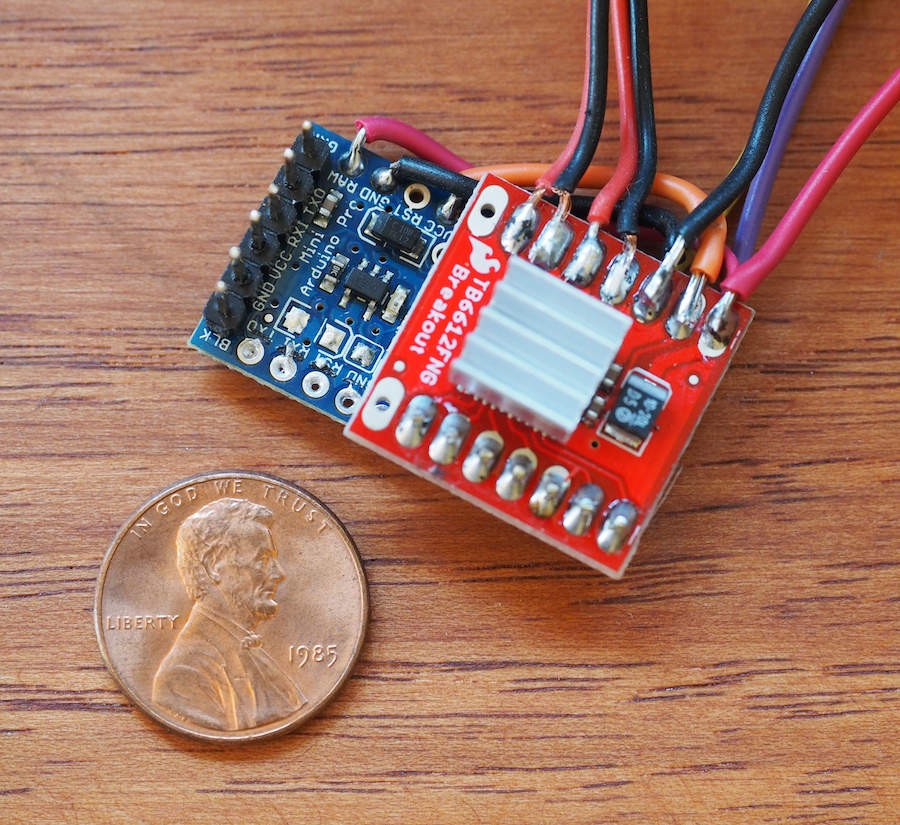
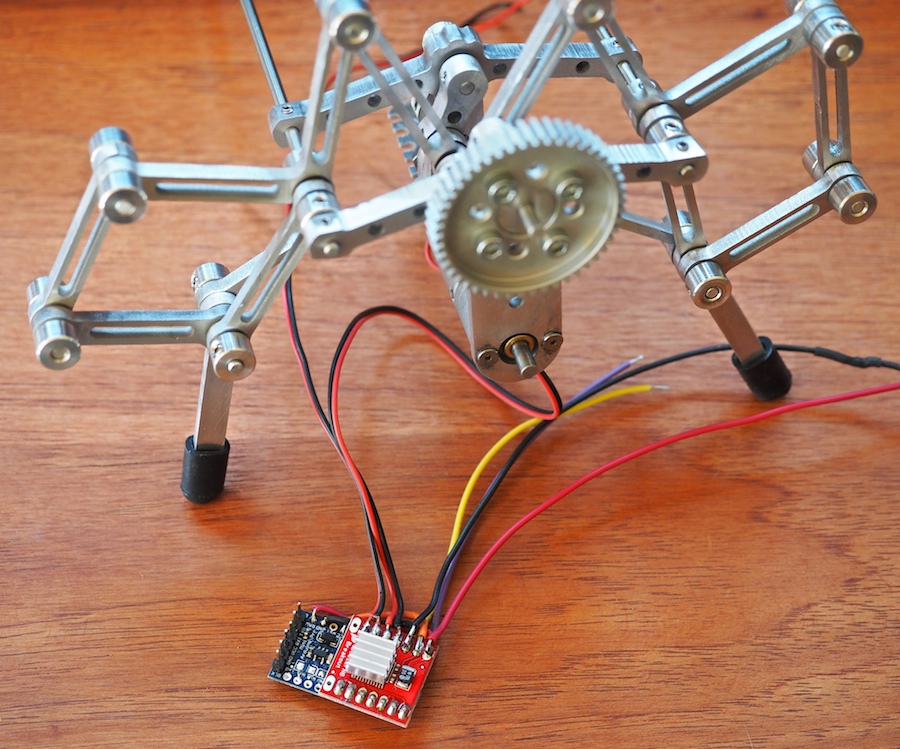
Recently, we encountered a situation where we needed a very small Arduino microcontroller and motor driver. On Alumini, our 12-legged walking robot, there won’t be an electronics box, so we will be integrating the electronics into the bones of the creature. Our goal was for the creature to appear to be all legs. So, we needed the electronics to be very small, hidden beneath and between the robot’s many leg linkages. After trying a few experiments with different components and approaches, we’re excited about the approach we came up with. We don’t know whether it’s going to work in the final robot yet, which is still under construction, but so far it seems promising. The Arduino Pro Mini board from Sparkfun is just 0.7″ x 1.3″ and it’s on a 0.032″ thick circuit board, so it’s a very small, thin little microcontroller indeed. We love the form factor. If it works on this project, it may just become our “go-to” microcontroller for small projects. We also decided to try Sparkfun’s tiny 1A Motor Driver, which is only .8″ x .8″ square.
Genevieve and I soldered up the boards and they’re working well so far, but the one negative we’ve encountered is that the motor driver is a very simple little thing. It’s basically just a breakout board for the TB661FNG chip, so it doesn’t have a lot of on-board smarts. Instead of a single TTL serial wire like we’re used to, it requires 2 PWM pins and 5 digital pins to control it. We don’t have a lot of room for wires, so we did something we thought was really cool: we sandwiched the boards together and turned the motor driver into a tiny make-shift shield for the Pro Mini board. We lined up the pins just right, wrote the software to correspond to those pins, and literally soldered the boards together, which eliminated the need for the 7 control wires. We thought there was a fair chance we would ruin the two boards, but it worked like a charm. In the photo, the seven solder points near the penny (on the red board) are the control pins between the arduino and the motor driver. The other wires (at the top of the photo) go to the 11.1V LIPO battery, motors, sonar sensors, xbee radio, and other components of the robot.
The next big question is whether this little motor driver, which is rated at 1.2A per channel can handle Alumini’s 20mm x 42mm metal gearmotors, which are rated for a free-run current of 0.25 Amp and a stall current of 3.3 amps. Normally we would use a 5A motor controller for these motors, but the 5A motor controller was too large to fit on Alumini’s delicate frame. Once we had soldered our mini robot control system together, we were able to do some testing. When we run the partially-completed Alumini robot on the bench, the motors are pulling .6 Amp each, but they don’t have much force on them yet. We’ll see how this goes once we get Alumini scuttling at high speed around the room. We may end up smoking the motor driver and going back to the drawing board. We thermal-pasted a tiny aluminum heat fin to the chip to help dissipate the heat. We’ll keep you posted.
If you know of any small microcontrollers and motor drivers that would be good for our purpose, please let us know. We would love to know how you’ve solved these problems on your projects.