https://vimeo.com/104241178
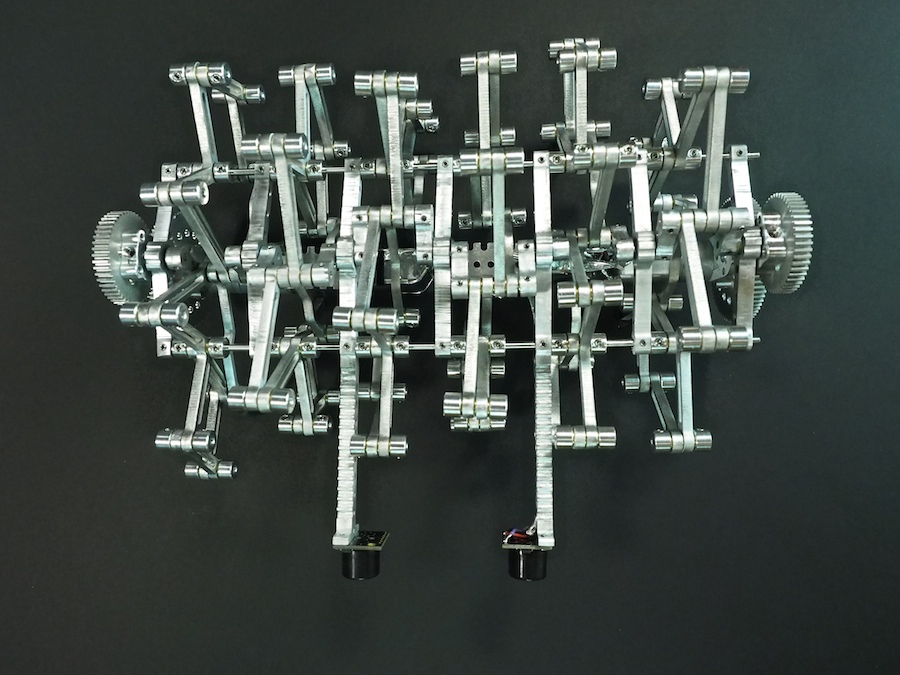
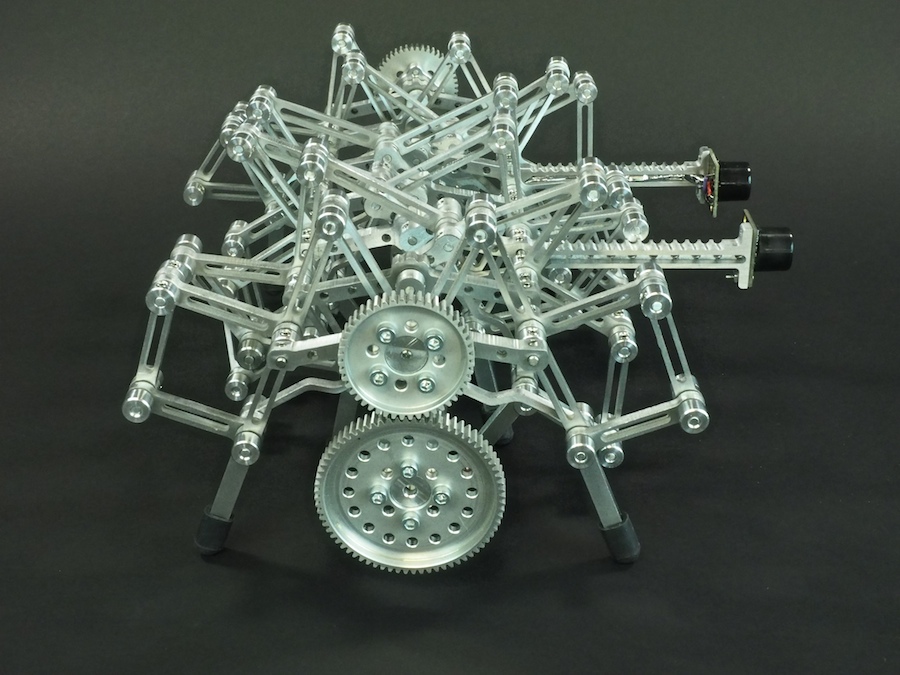
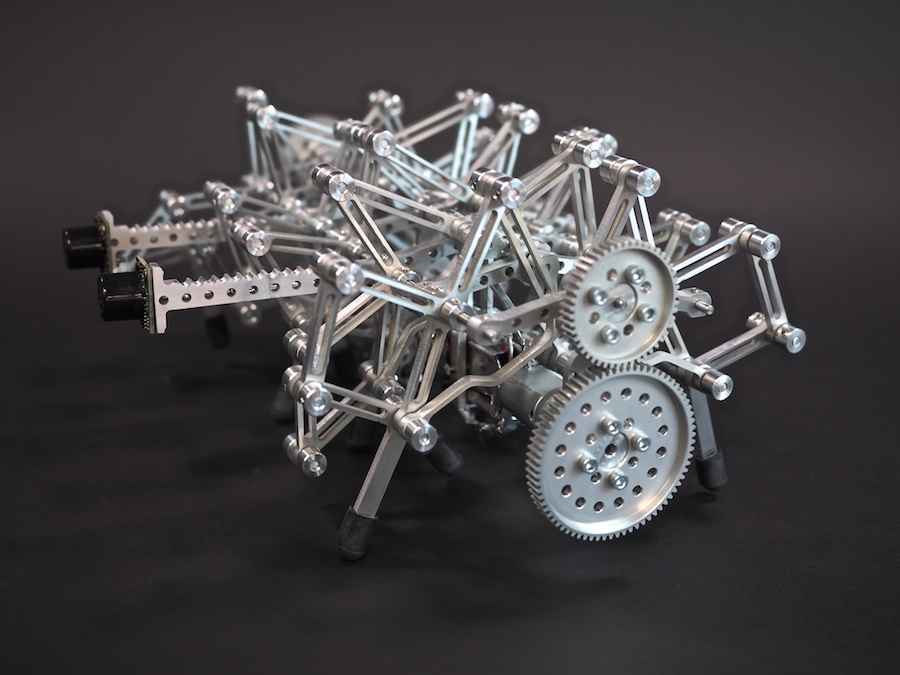
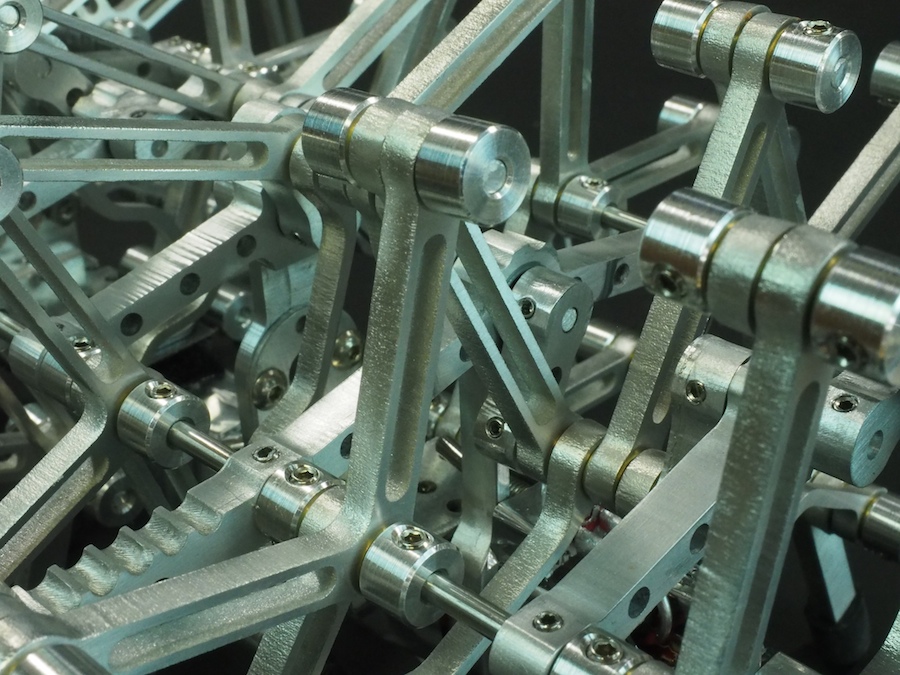
We would like to introduce you to our newest robot. Her name is Alumini, which is pronounced Ah-lu-min-ee. She’s a 12-legged running creature. She’s made out of custom, CNC-machined aluminum components designed to be like vertebrae and bones in keeping with the idea that is a creature not just a machine. Our goal was to create a little beastie without any visible wires or electronics (other than her sonar eyes). She does not have a box filled with electronics like our other robots. We wanted her to look like she was all legs. This meant we needed to use very small electronic parts and we had to do some very tricky wiring. The soldering on this project proved to be quite a challenge, but we were happy with the end results. Alumini is ten inches wide and consists of over 500 parts. Like her much larger 16-legged predecessor, Aluminalis, she uses gear motors to drive two crankshafts, one for each side. Alumini uses a tiny Arduino Pro Mini 328 microcontroller. She can operate via remote control (using an on-board xbee radio) or autonomously using her sonar eyes.

OUR POSTS ON THE CONSTRUCTION OF THIS ROBOT:

Nice, looks very menacing
So totally cool! I love it! The video warmed my heart. What a cool robot. I’m glad alumini found its momma. Awesome job Genevieve! and Beatty robotics!
Amazing! I love seeing the progress of creation of the Beatty robots. Your video is a fantastic show all in itself. With the inspiring music, the demonstration of mobility, even the sound of the Alumini and your most adorable and hard working partner, Genevieve. Great work. Thanks for sharing it.
Awesome! How much do they weigh?
Awsome
Todd: Thank you! Alumini weighs 915 grams. Her big sister Aluminalis weighs 1950 grams.
Nicely done! You guys have way too much fun 😉