
A Counter-rotating Differential
Back in November of 2011 we posted an article about our first Spirit II Mars Rover. Among other things, that rover included a counter-rotating differential (or universal joint) integrated into its rocker-bogie suspension system. If the front wheel on the left side of the rover went upward over a large obstacle, then the differential would push the three wheels on the right side downward, and vice versa. Its purpose was to stabilize the rover when traversing rough terrain. We made that first counter-rotating differential from bevel gears, aluminum rods, aluminum plates, and screws. Its shafts were connected to each side of the rocker-bogie suspension system. The function was simple: If either of the shafts rotated, then it caused the other shaft to rotate in the opposite direction. Our original version worked quite well, but it was also large, bulky, and a bit difficult to keep running smoothly.
Recently, our friends at Actobotics / ServoCity sent us a couple of their new bevel gears to try out. It’s cool how a few new parts can fire up your imagination and get you thinking. We decided to see if we could create a new counter-rotating differential for a future Mars Rover project. We were very pleased with the results. The new differential is much smaller than the old version, so it will fit nicely inside the box of a Mars Rover, and its operation is smooth and robust. Camille took all the photos of the new differential.
THE NEW COUNTER-ROTATING DIFFERENTIAL 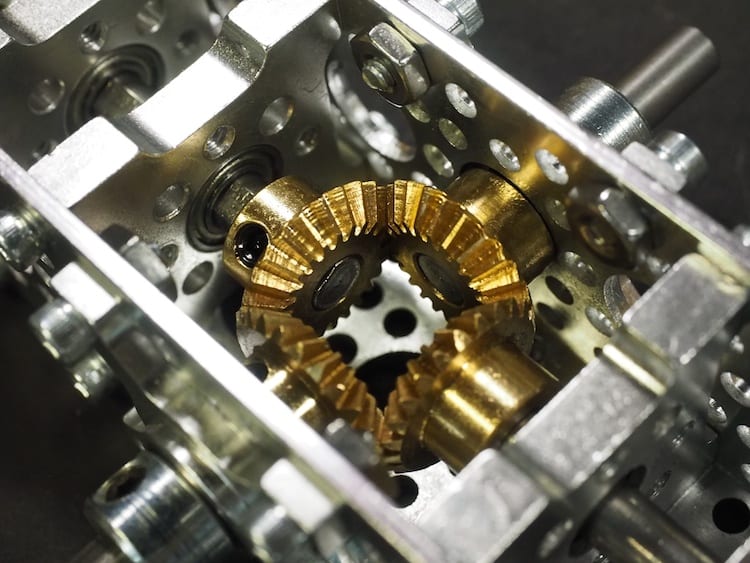
CLOSE-UP OF THE NEW COUNTER-ROTATING DIFFERENTIAL 
CAMILLE’S ARTISTIC BACK-LIT SHOT OF THE COUNTER-ROTATING DIFFERENTIAL 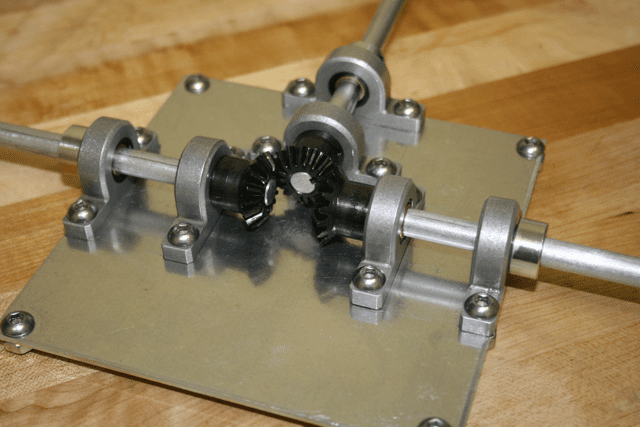
OUR ORIGINAL COUNTER-ROTATING DIFFERENTIAL 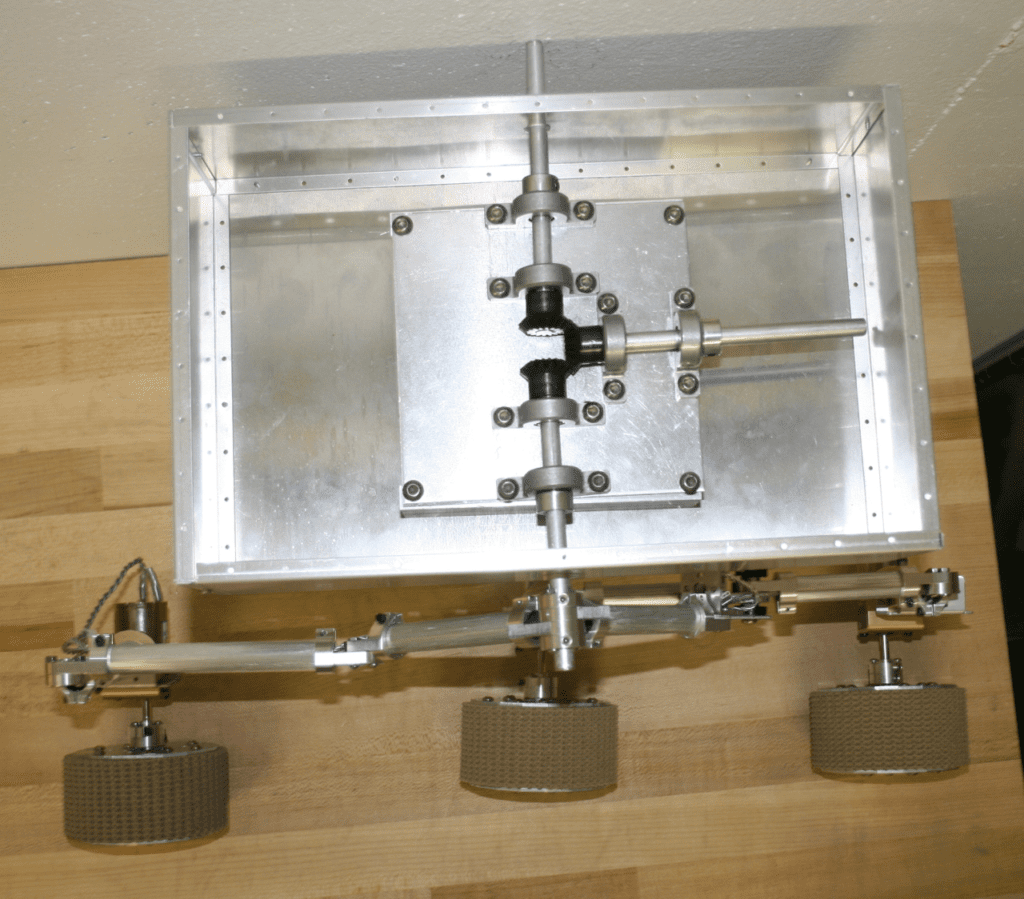
THE ORIGINAL DIFFERENTIAL IN THE PARTIALLY COMPLETED SPIRIT II MARS ROVER. ONLY THE LEFT-SIDE WHEELS ARE IN PLACE.

