Sojourner Mars Rover
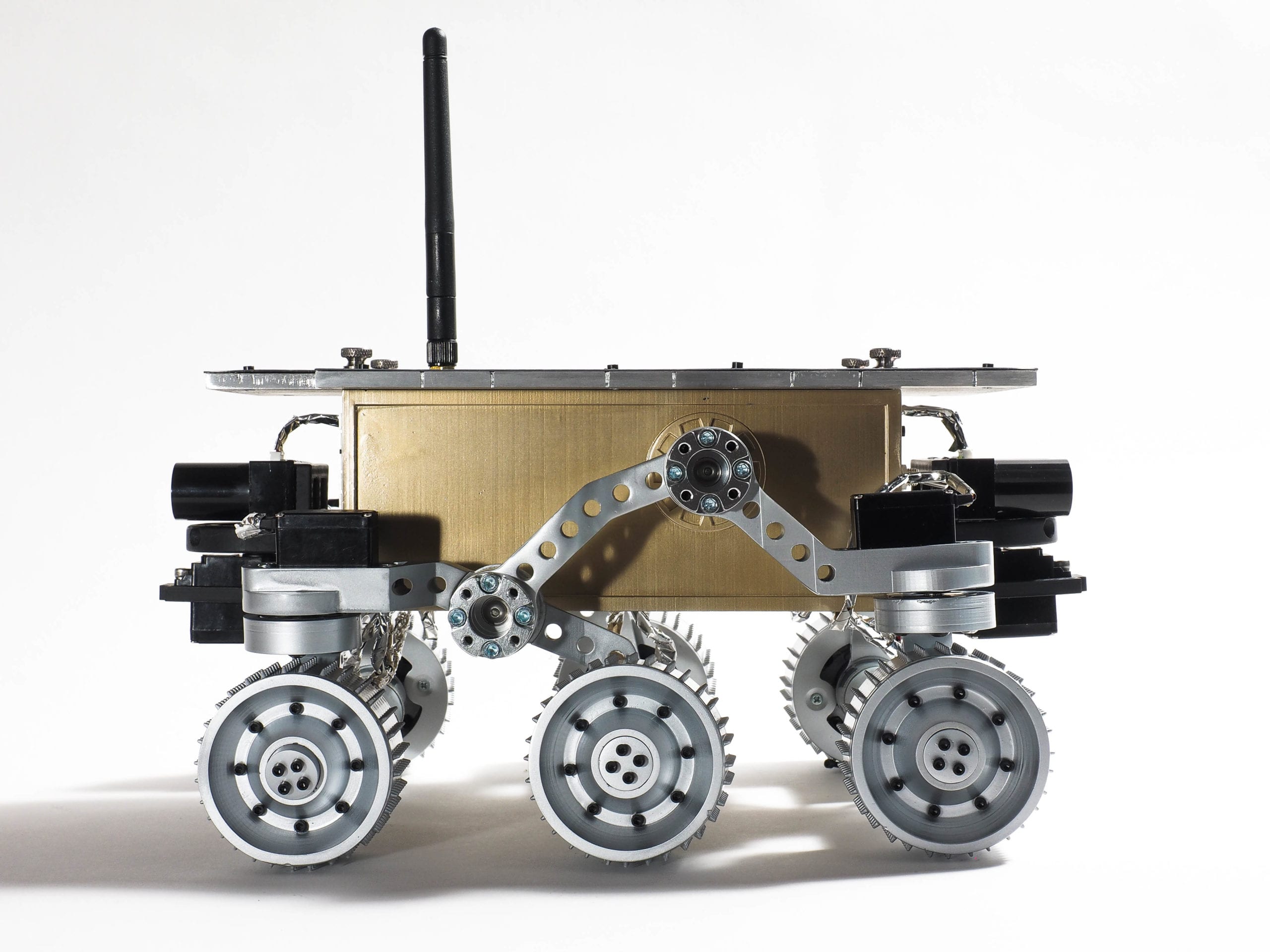
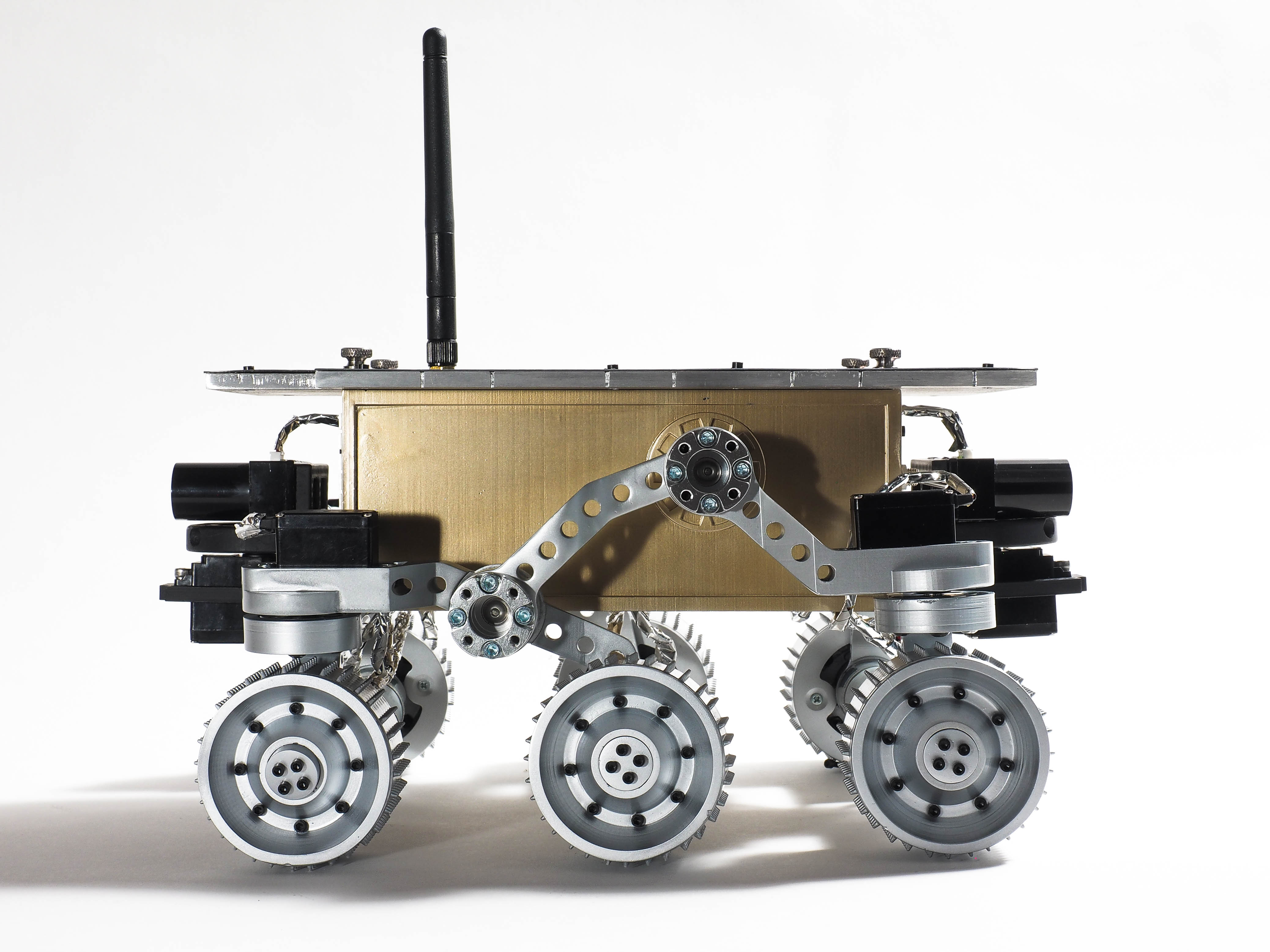
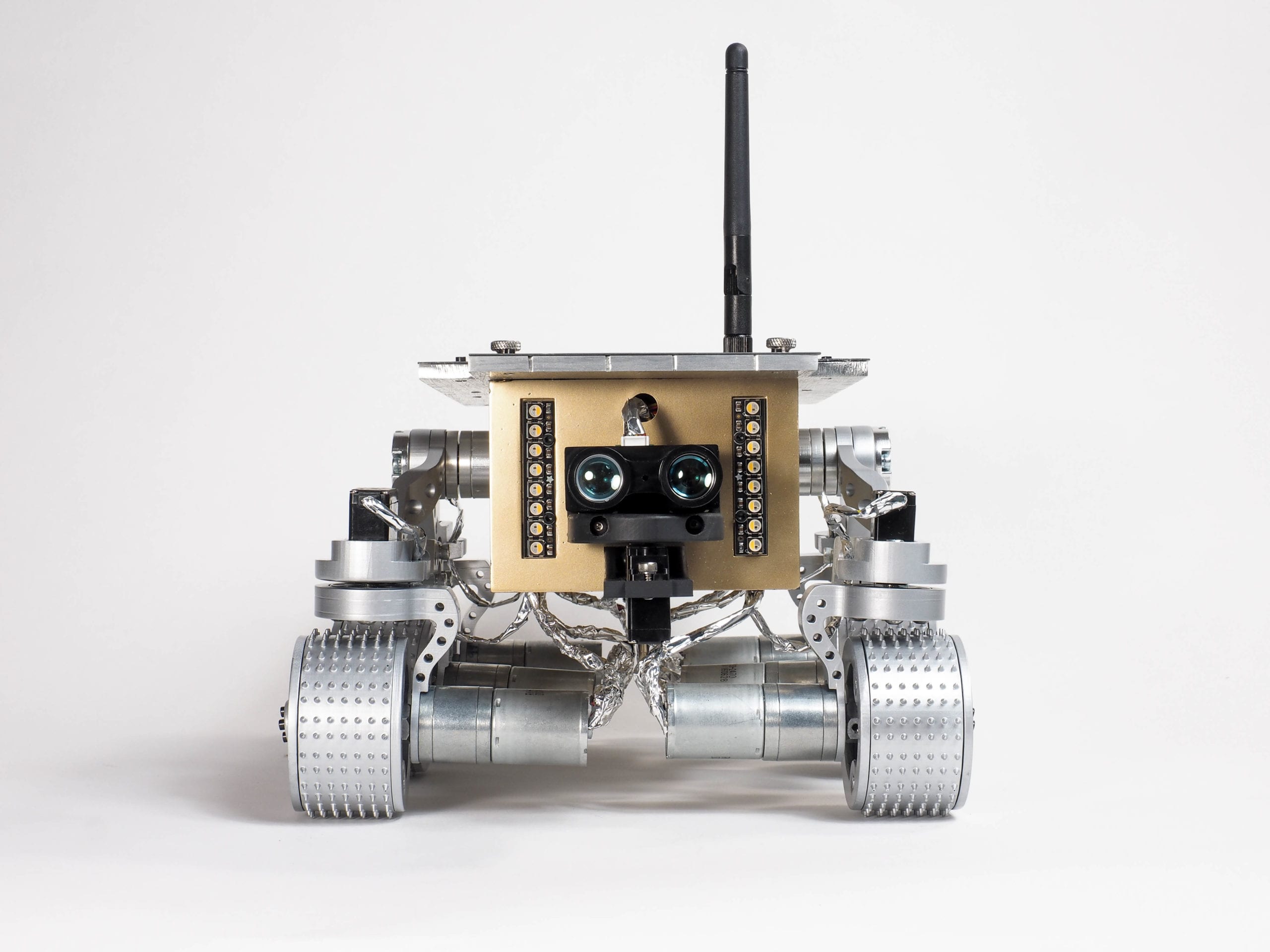
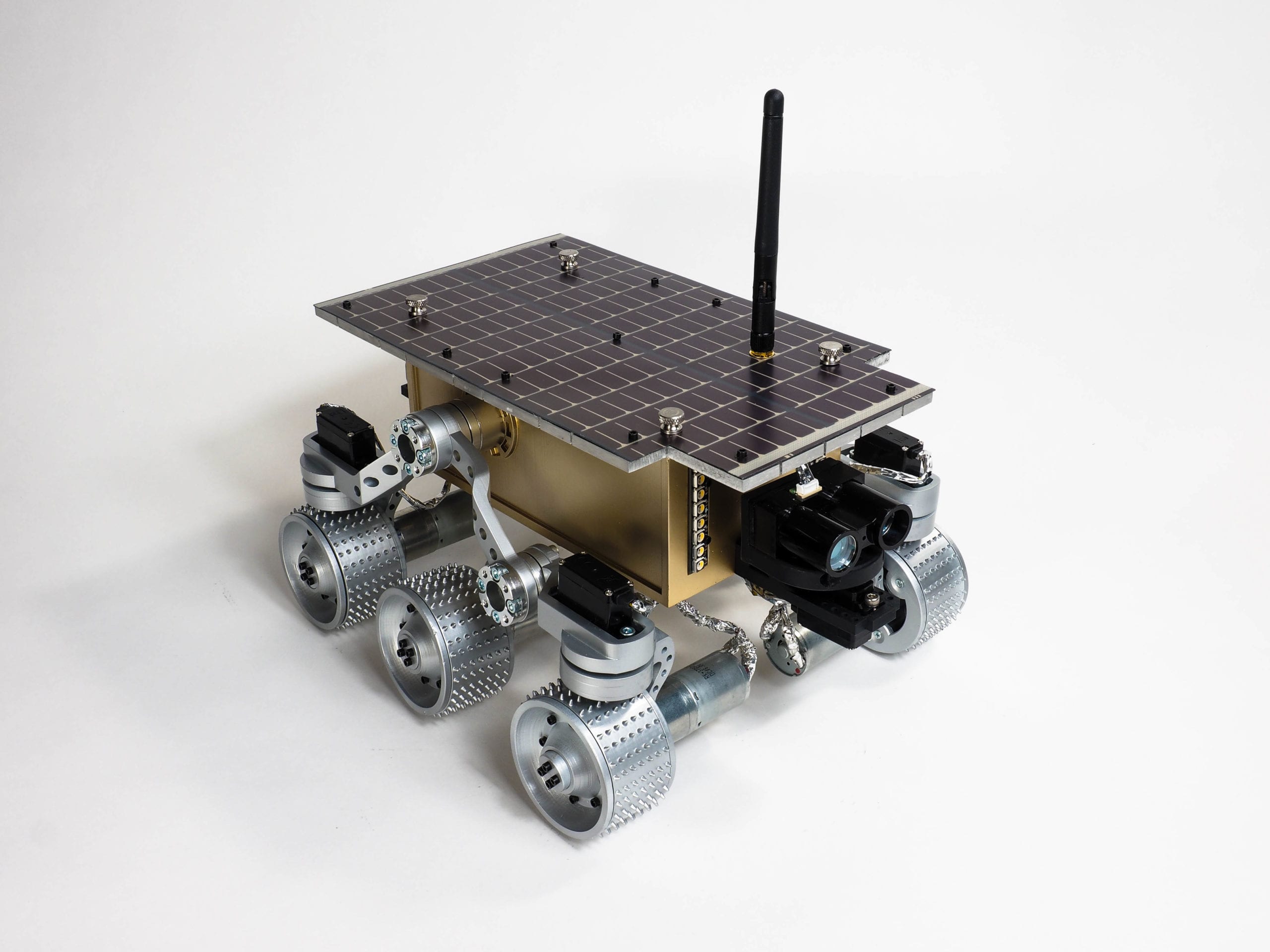
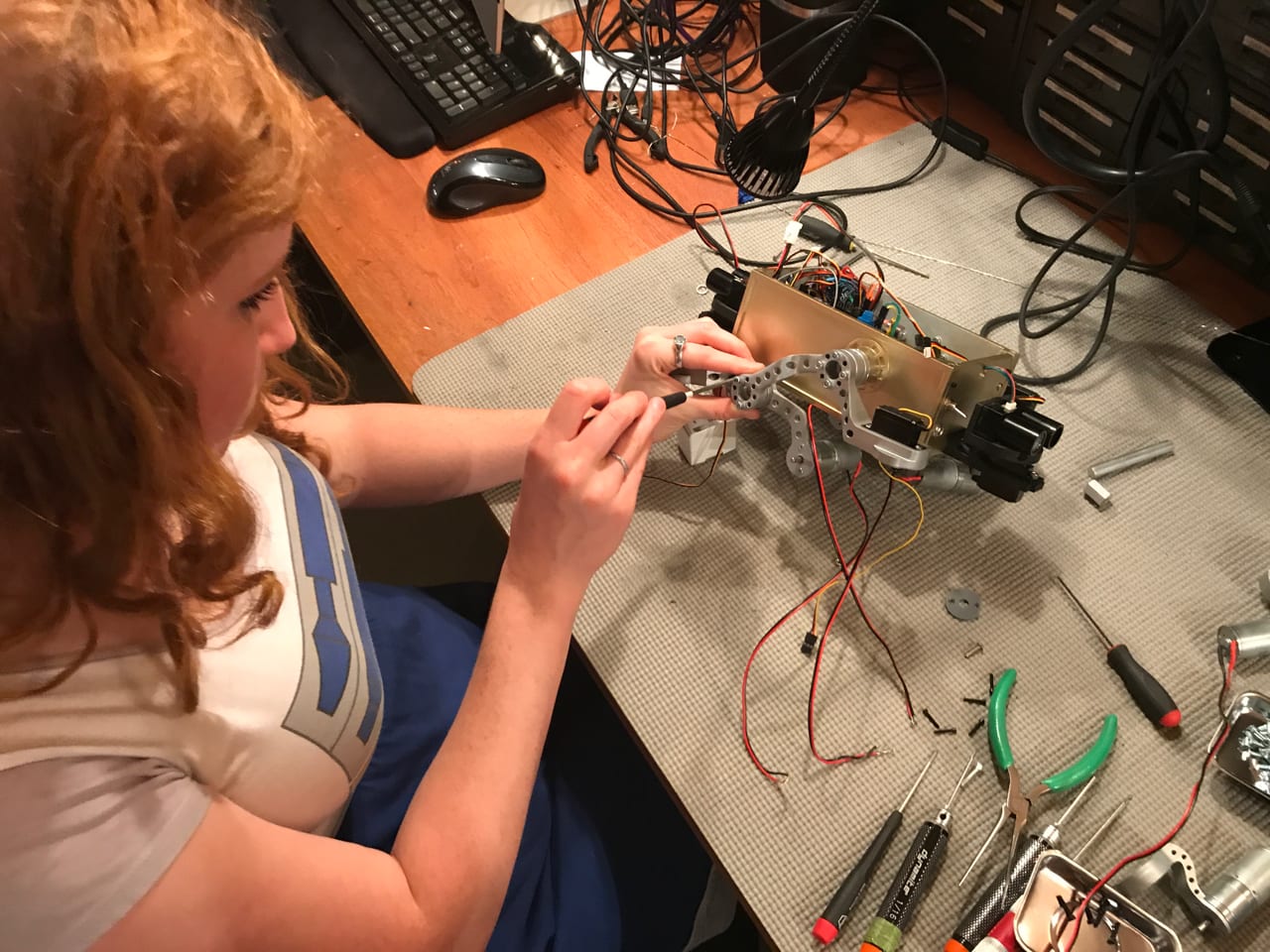
We are super excited to introduce Sojourner, our newest robot. The original 1997 NASA Sojourner was the very first robot to operate on an different planet. Like the real Sojourner, our little robot includes six wheels, rotational servo steering, a fully-functional rocker-bogie suspension system, solar panels, a large main antenna, lithium battery, a “warm box” to protect its electronics, a video camera, and a host of other components. We built our Sojourner in 1/2 scale because it is intended to be used in interactive exhibits in space museums where space is limited. Here are some photos of the robot, followed by work-in-process photos from the workshop, our CAD models, and two images of the real Sojourner for comparison purposes.



We worked hard on the inside of the robot as well. It contains a new thing we’ve put together that we call “The Core”. The Core is a stack of integrated electronics that includes an Arduino Zero, a Servo Shield for controlling the robot’s 8 servos, a custom shield we’ve developed, and a high-powered Motor Controller. We think it’s interesting that the real Sojourner used an 8-bit microcontroller that ran at 2 MHz. Our Sojourner robot uses a 32-bit Cortex M0+ processor running at 48 MHz. In other words, our Sojourner is far more powerful than the real NASA Sojourner. That’s crazy! A lot has happened since 1997!
You may notice that Sojourner is equipped with a servo-mounted laser range finder (LIDAR) on the front and back. As the servo sweeps through 180 degrees, the LIDAR unit shoots out a laser to determine the distance to the nearest object at each degree. This is used for obstacle avoidance and autonomous navigation. Sojourner is also equipped with an HD camera that streams FPV video back to video goggles and/or computer monitor.
Sojourner is equipped with an Xbee radio for transmitting to and receiving from a computer control station. Sojourner is capable of exploring autonomously, or taking a “Command Sequence” (a series of user-programmed movement commands), or real-time manual Remote Control.
This is a small little robot, but it’s become one of our favorites. In future posts, we’ll share some video of Sojourner in operation, a description of the control software, and the details about the new shield we’re working on.
We would like to thank Arduino, Actobotics/ServoCity, Adafruit, Pololu, Ion Motion, and the other companies that provided many of the components. We would like to give special thanks to Dan Kreisher for helping us with the CAD modeling on Fusion 360.


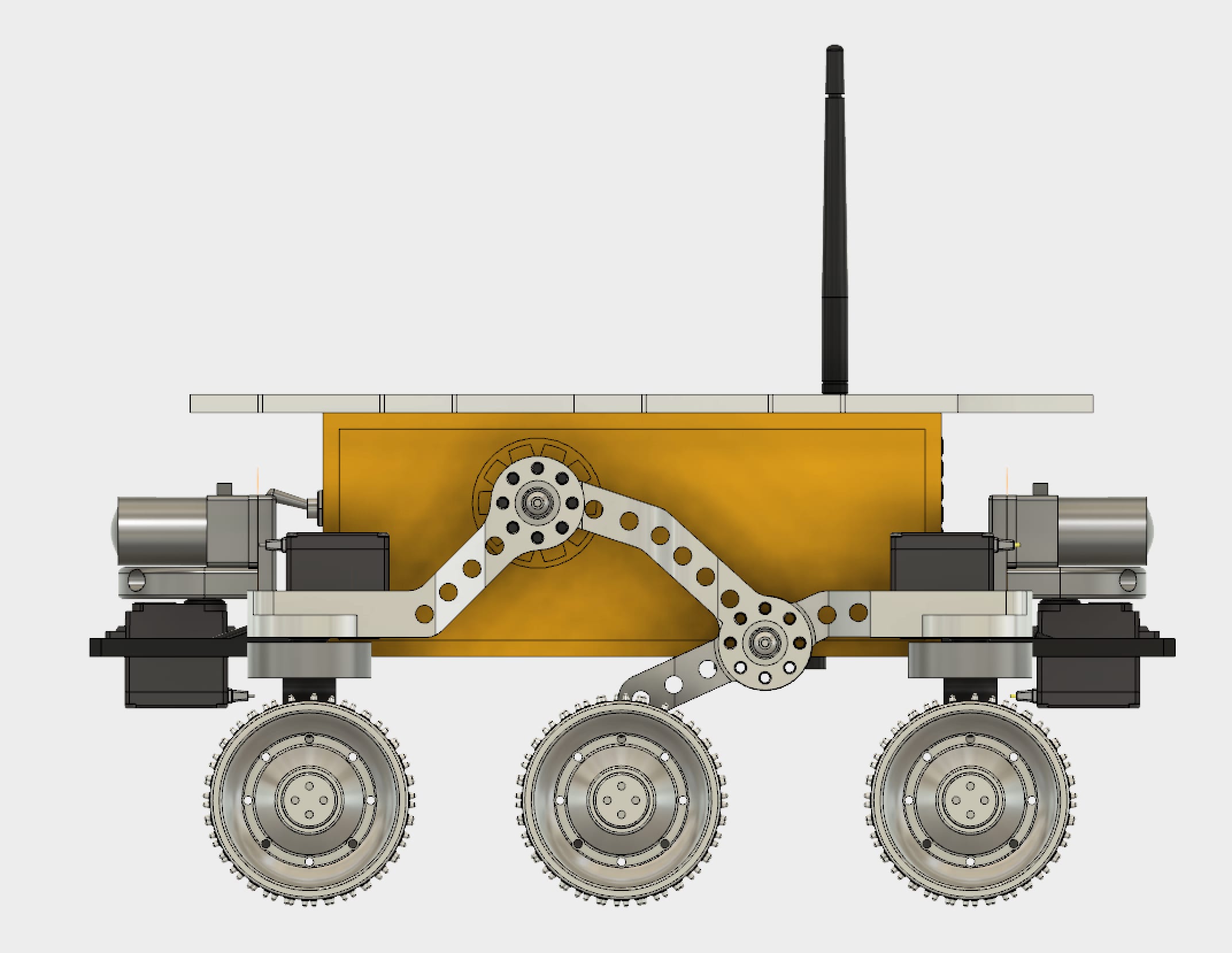
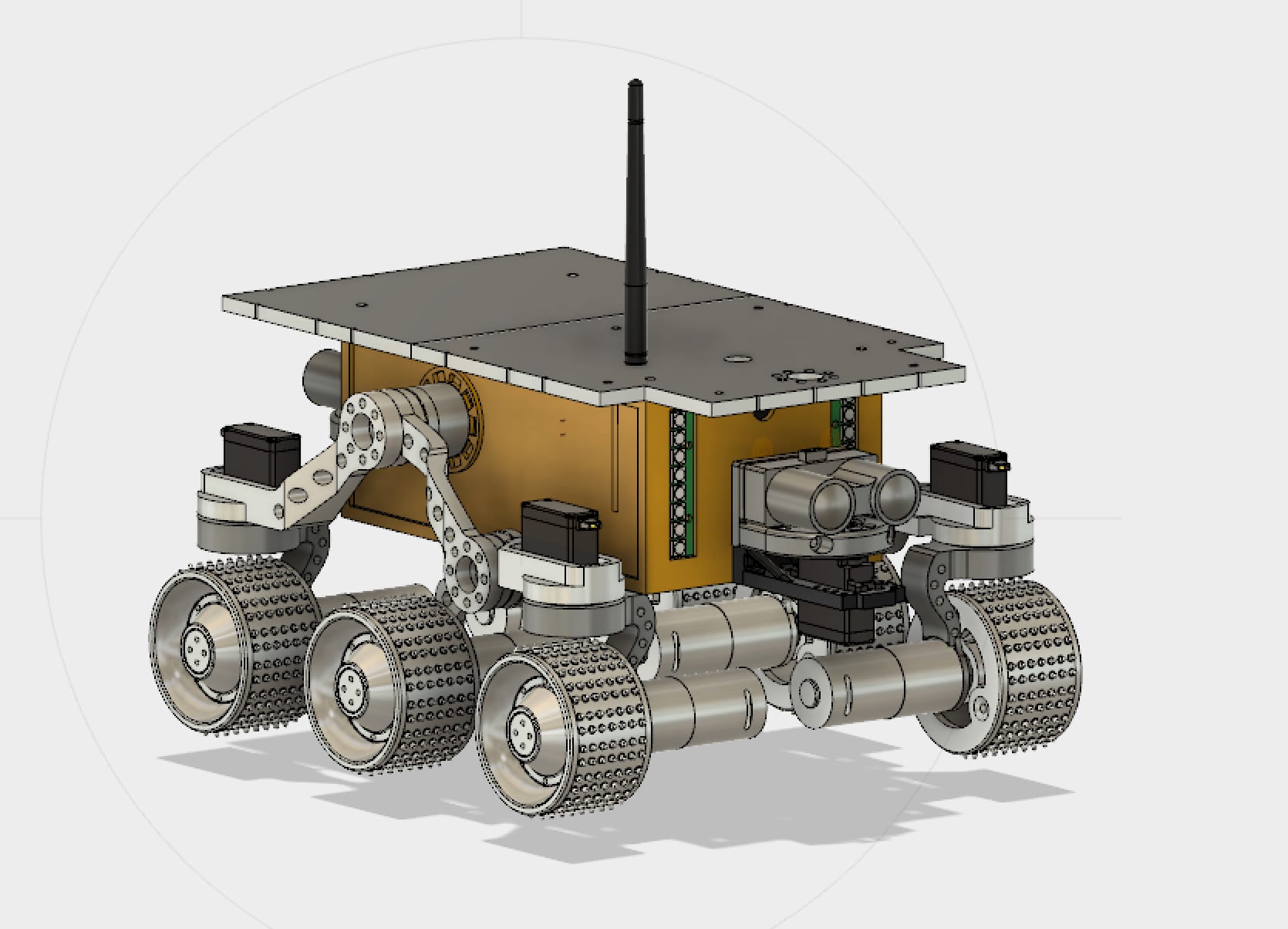
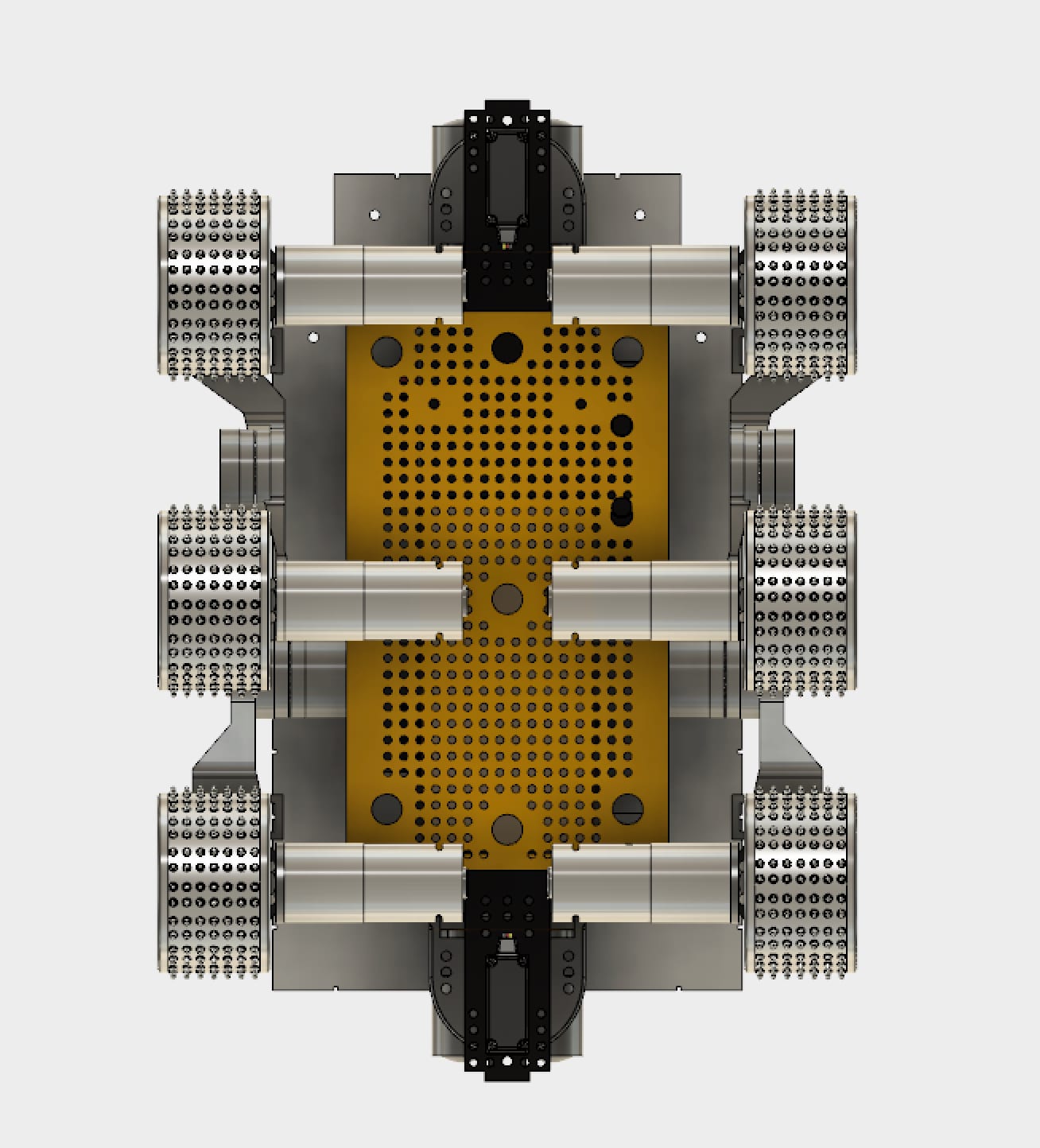
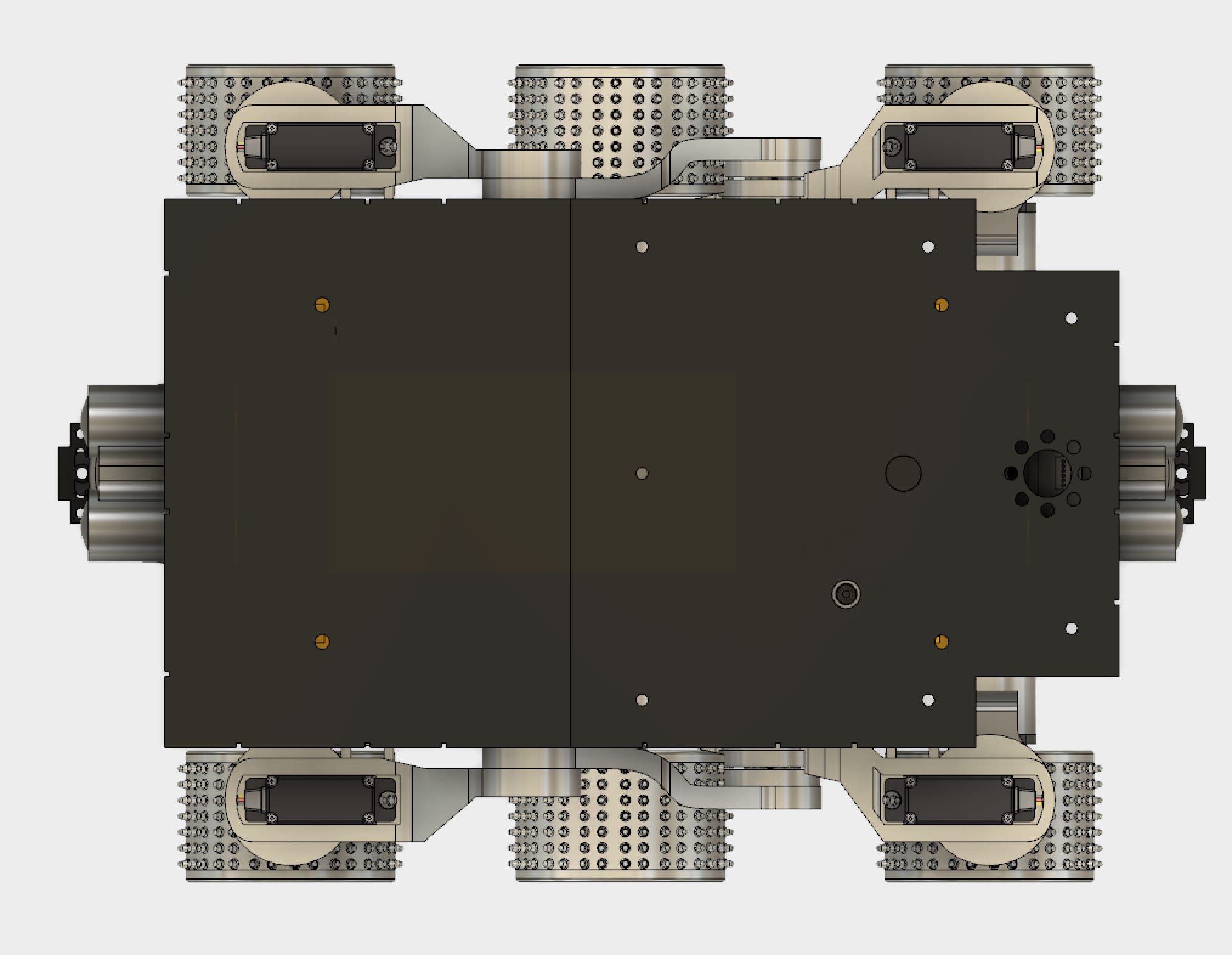
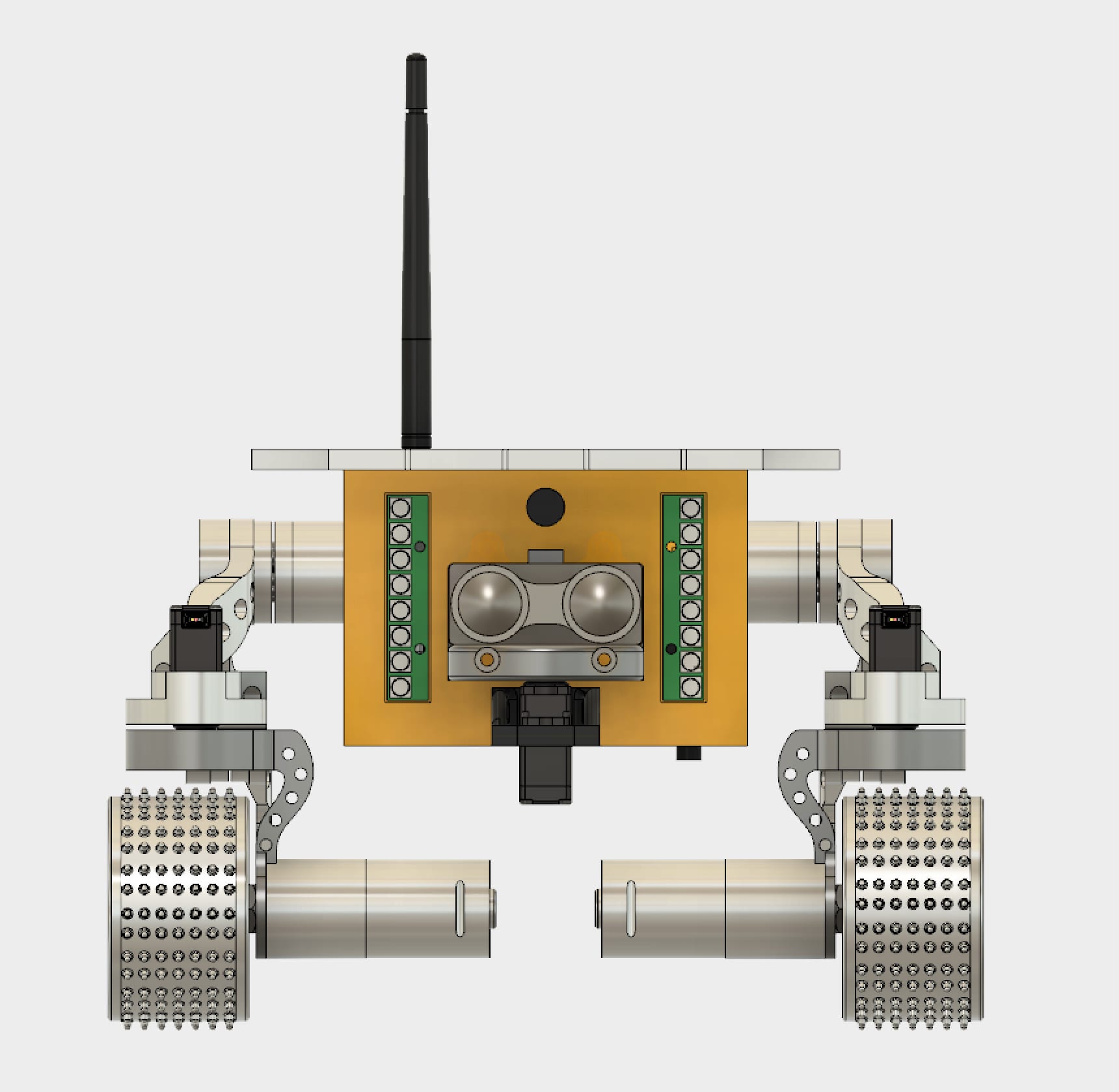
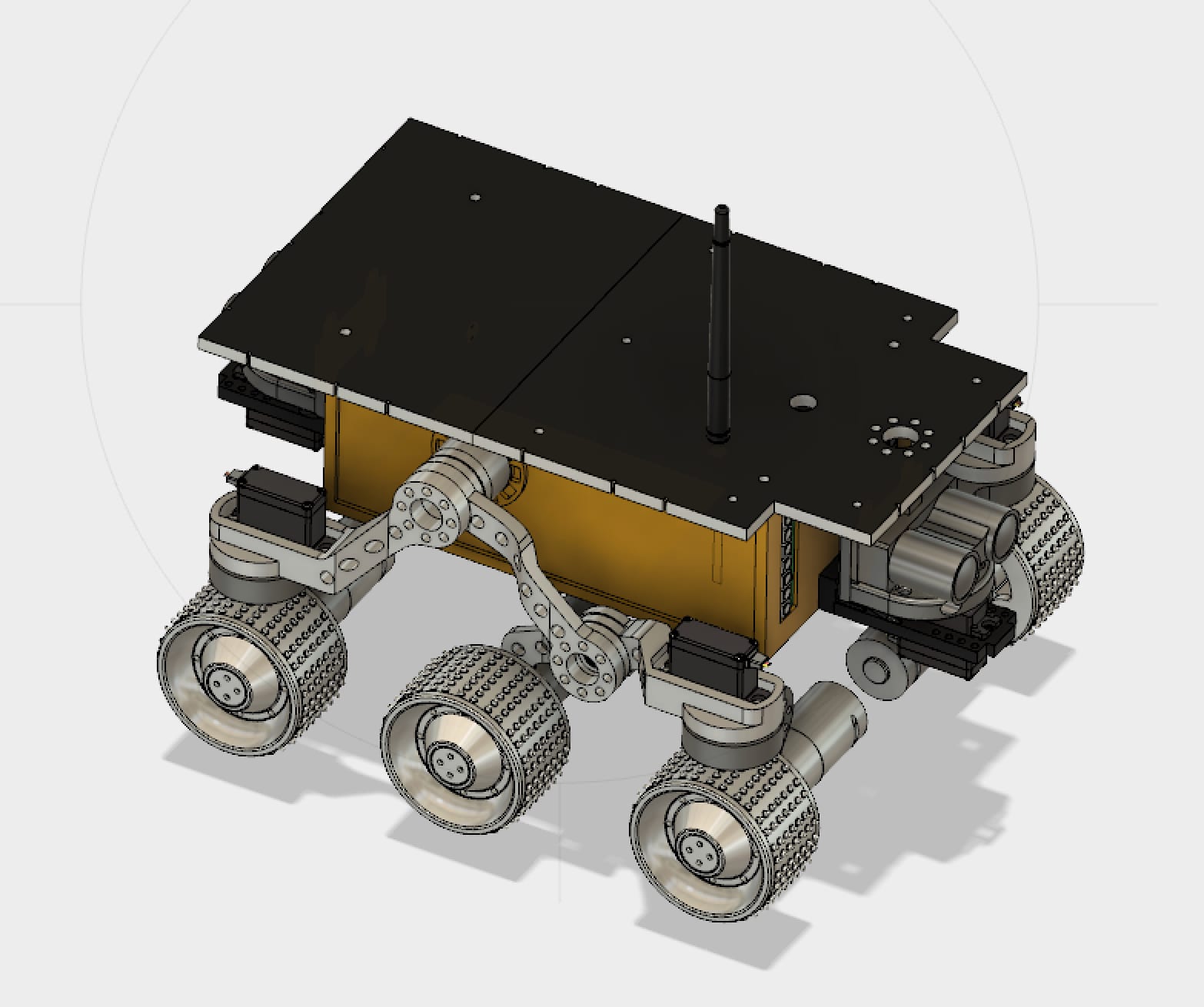
THE BEATTY ROBOTICS 3D CAD MODEL OF SOJOURNER
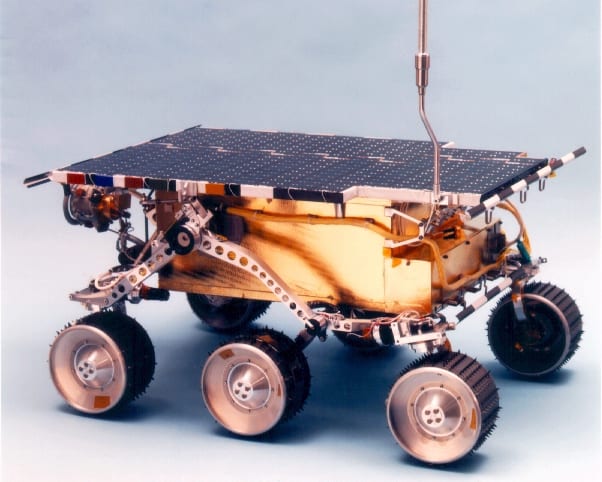
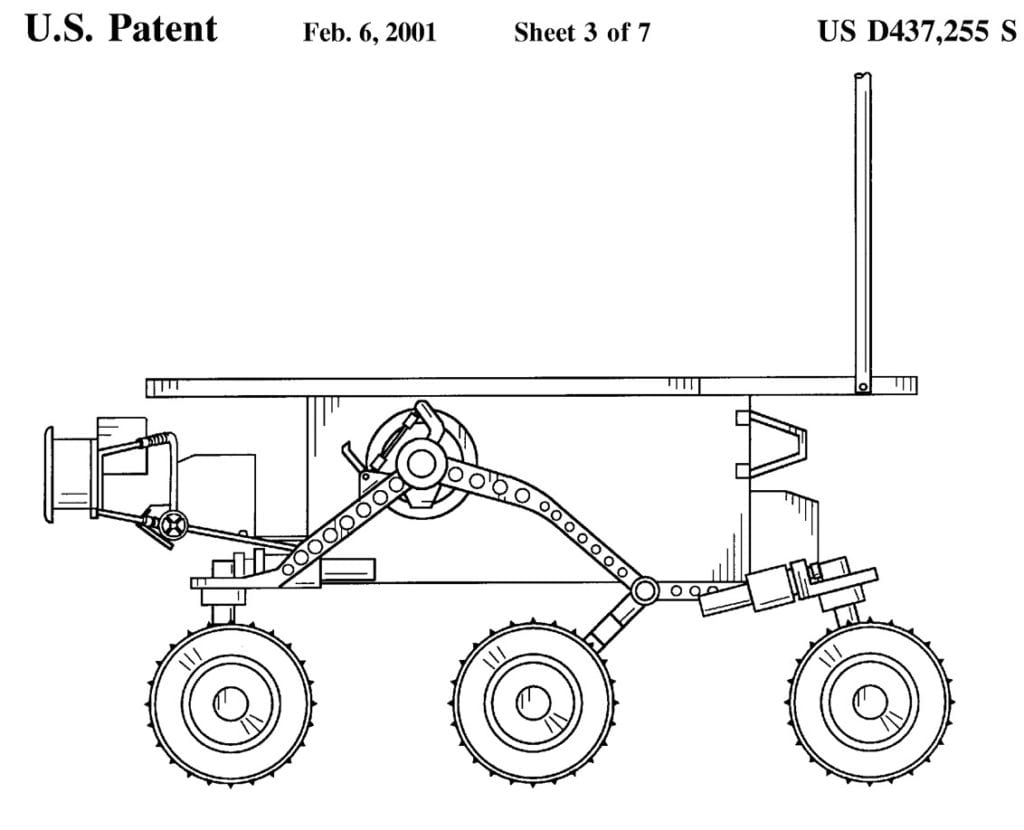
THE FOLLOWING PHOTOS SHOW THE ACTUAL NASA SOJOURNER ROVER
(Please note that the robot’s tread’s look blackish in this photo, but in reality the machined aluminum wheels had sheet-metal teeth, not rubber. Rubber would freeze and shatter on Mars)