Curiosity Mars Rover
We are excited to share our latest and most ambitious robot, the Curiosity Mars Rover. This is a highly-interactive, 1/10th scale functional replica of the NASA Curiosity Mars Rover. This project was ambitious for us in two main ways: First, we worked very hard to make the robot visually accurate to the original NASA rover. This necessitated custom designing and manufacturing nearly every visible component on the robot. One of the key challenges was to get the required level of detail and functionality into such a small scale robot. Second, we encapsulated all the features and capabilities we wanted for this robot into a robust, maintainable, and modular electronics package based on a stack of custom Printed Circuit Boards (PCB) that we designed. This post focuses on the external view of the robot while future posts will focus on the electronics and functionality.
Our Curiosity Mars Rover includes a Six Wheel Drive System (6WD), a fully-functional Rocker-Bogie Suspension System (RBSS), servo steering, a functional differential bar, a 360-degree camera/sensor turret, 3D LIDAR sensing, autonomous behavior, radio data transmission, and much more—all as per the real Curiosity. The rover is approximately 17” long x 20” wide x12” high.
To achieve the visual appearance we wanted, we carefully studied all the NASA photographs and drawings we could find, designed each component using the Fusion 360 CAD software (special thanks to our friend Dan Kreisher!), and then manufactured the custom parts one by one, including all of the body components, chassis struts, wheels, hubs, turret, top deck details, side details, and all the other visible components. All of the white parts, the struts, the servo covers, the wheels, and many other parts were printed in-house on our Formlabs SLA 3D printer out of engineering resin, then carefully sanded and painted (special thanks to Jennifer Beatty and Mike Dutra for helping out in this critical area!). The metal parts were machined out of 6061 Aluminum on our in-house Tormach CNC Mill and/or by our friend John Saunders. Several of the small stainless steel parts (around the camera lenses on the masthead) were laser cut for us by our friends at Pololu.
We’ll provide more details on the electronics and the build in the future, but here is a quick run down of some of our main sources: Pololu: motors, shaft hubs, motor controllers, smart switch, current sensor, and voltage regulators. PCJR: Teensy 3.6 microcontroller. DigiKey: resistors, capacitors, relays, connectors, wires, and all other discrete electronic components. McMaster-Carr: screws, spacers, nuts, raw material, and other fasteners. Robotis: Dynamixel servos. Sparkfun: Xbee radio board, LIDAR, and other electronics. Adafruit: Neopixel and other electronics. Amimon: Connex Prosight HD Video.
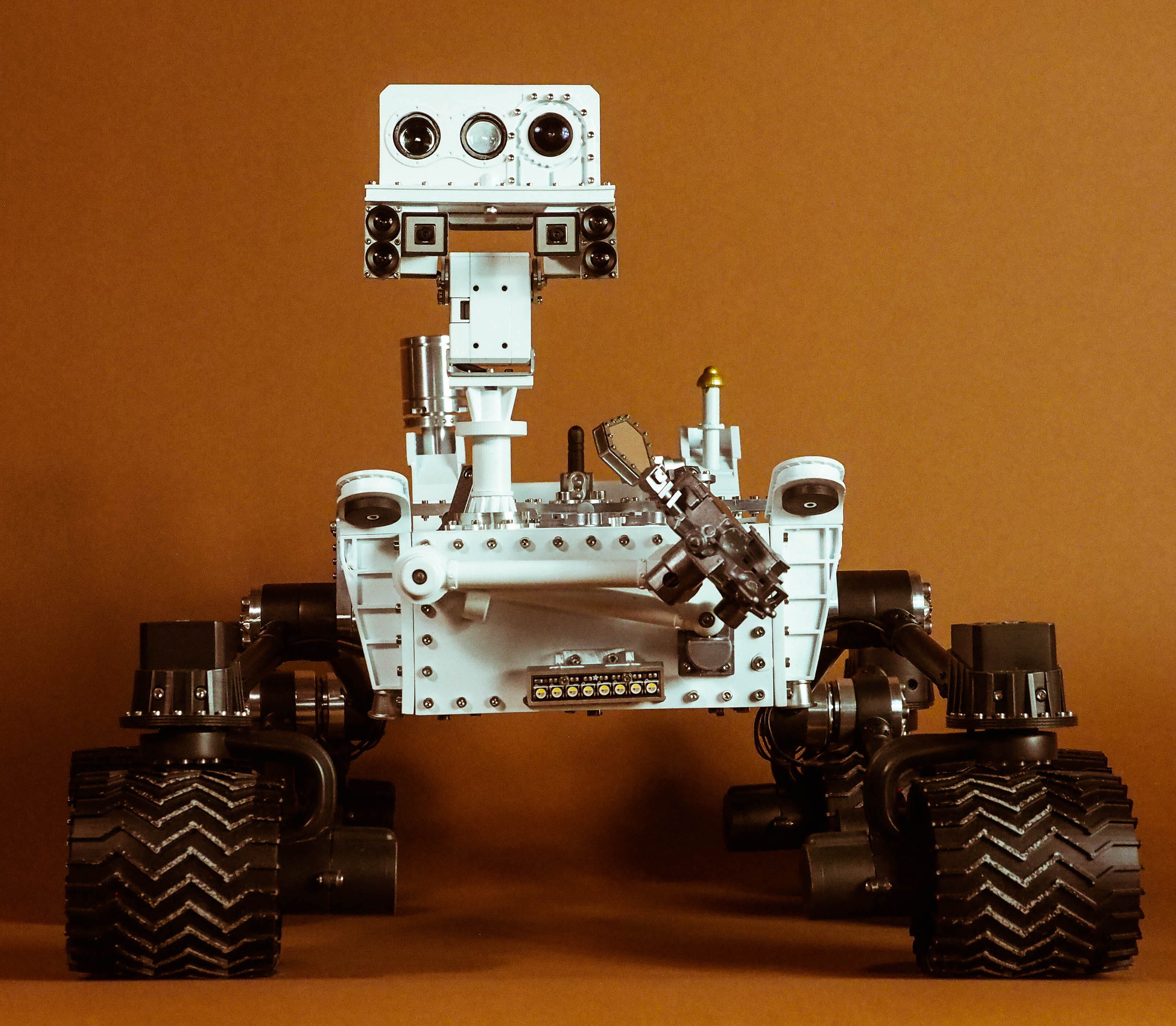
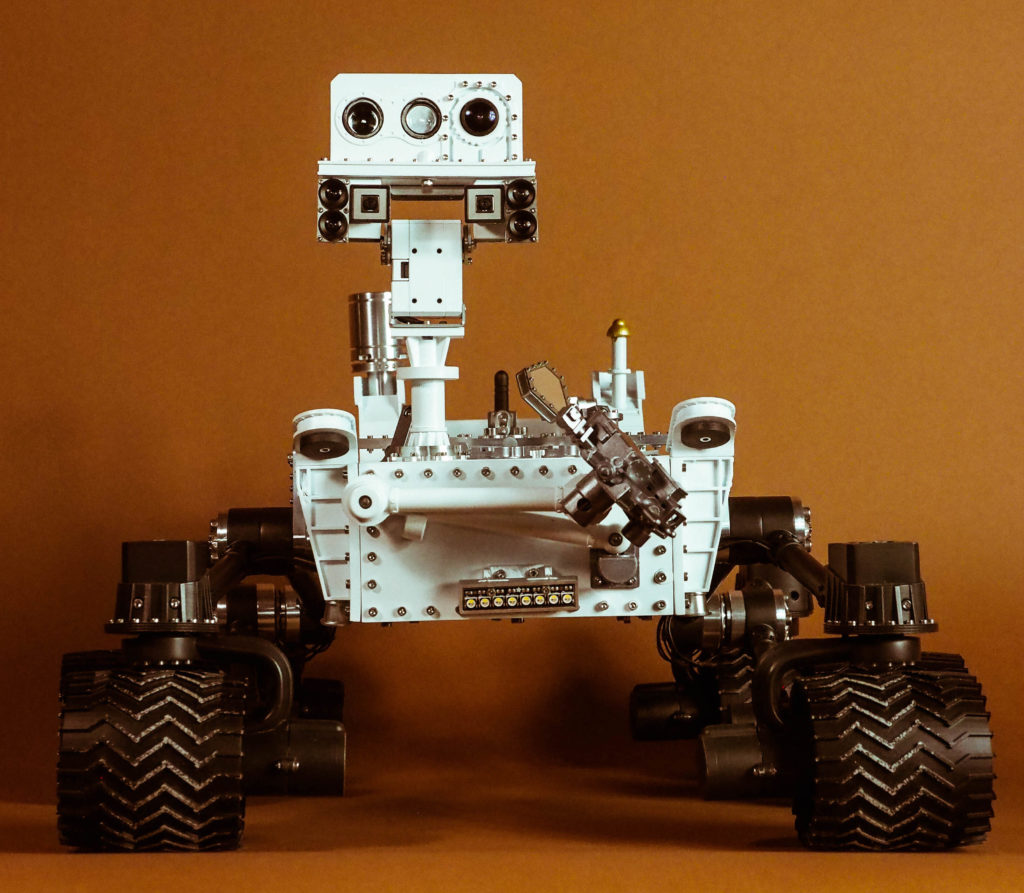
CURIOSITY MARS ROVER – MAIN VIEW
CURIOSITY MARS ROVER – MAIN VIEW 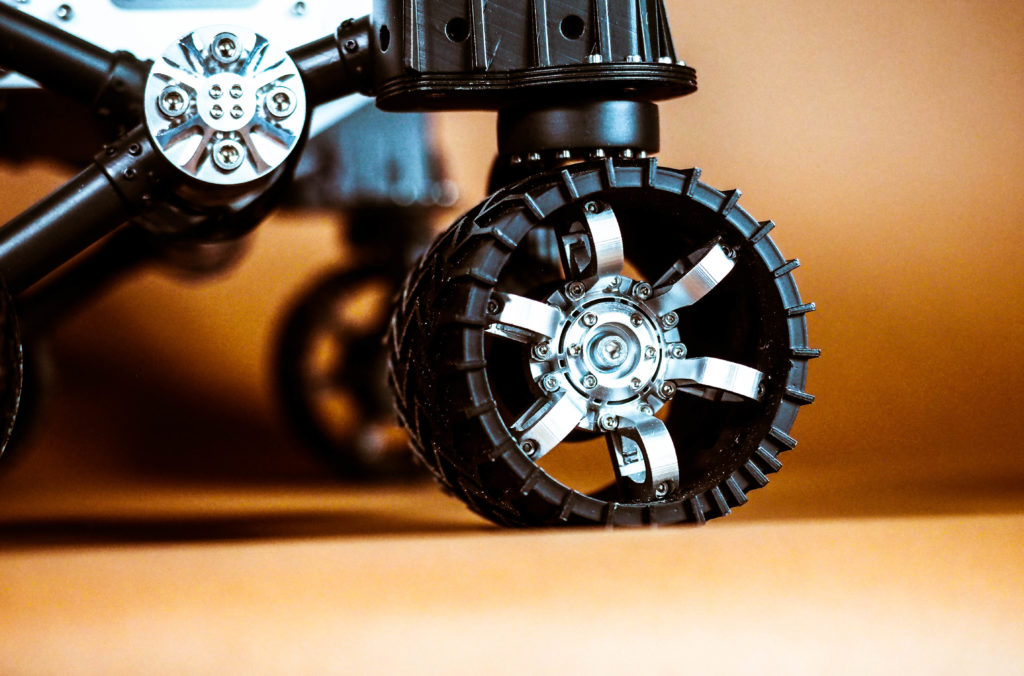
WHEEL CLOSE-UP 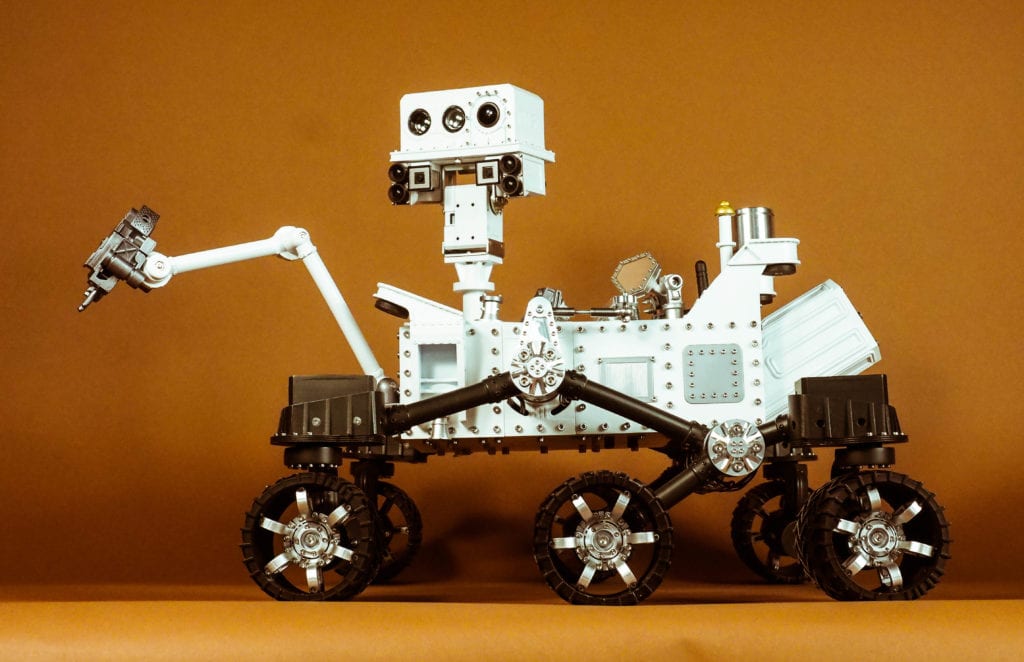
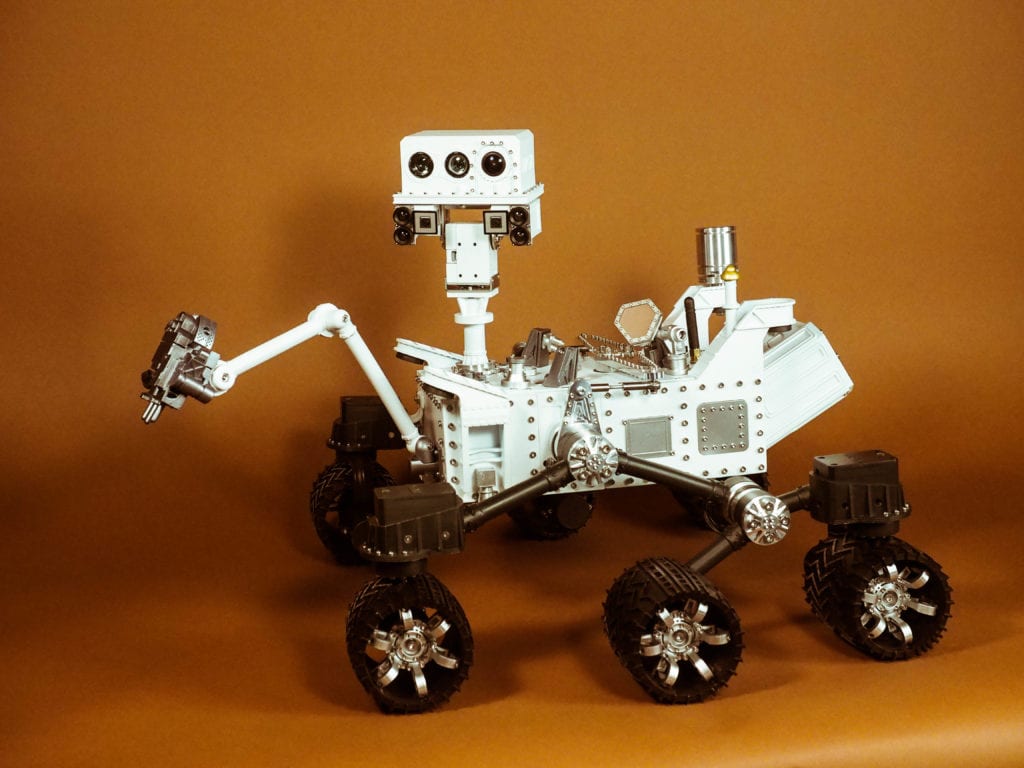
Side View 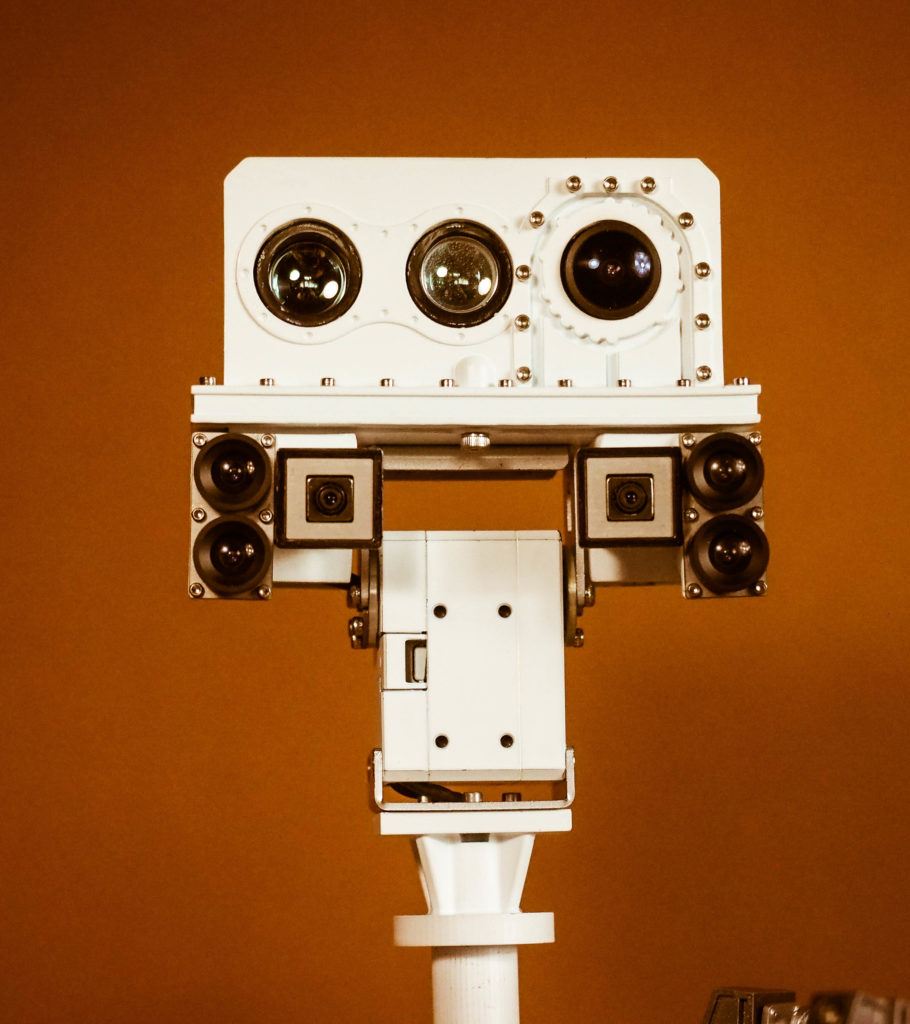
MASTHEAD 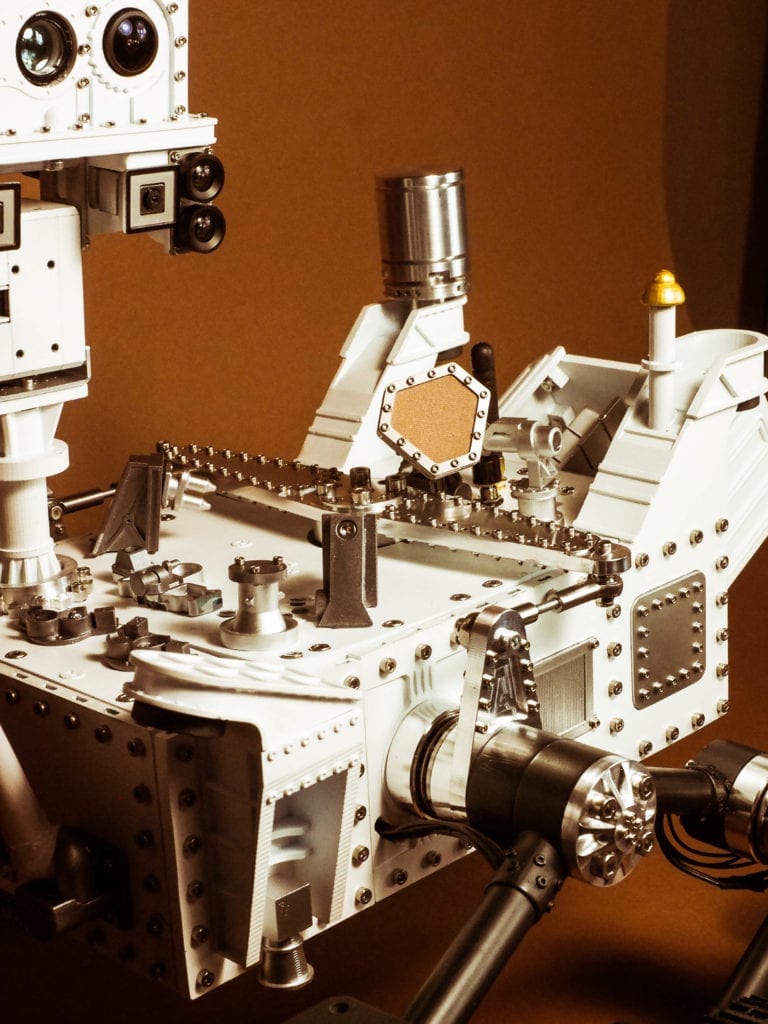
Top Deck 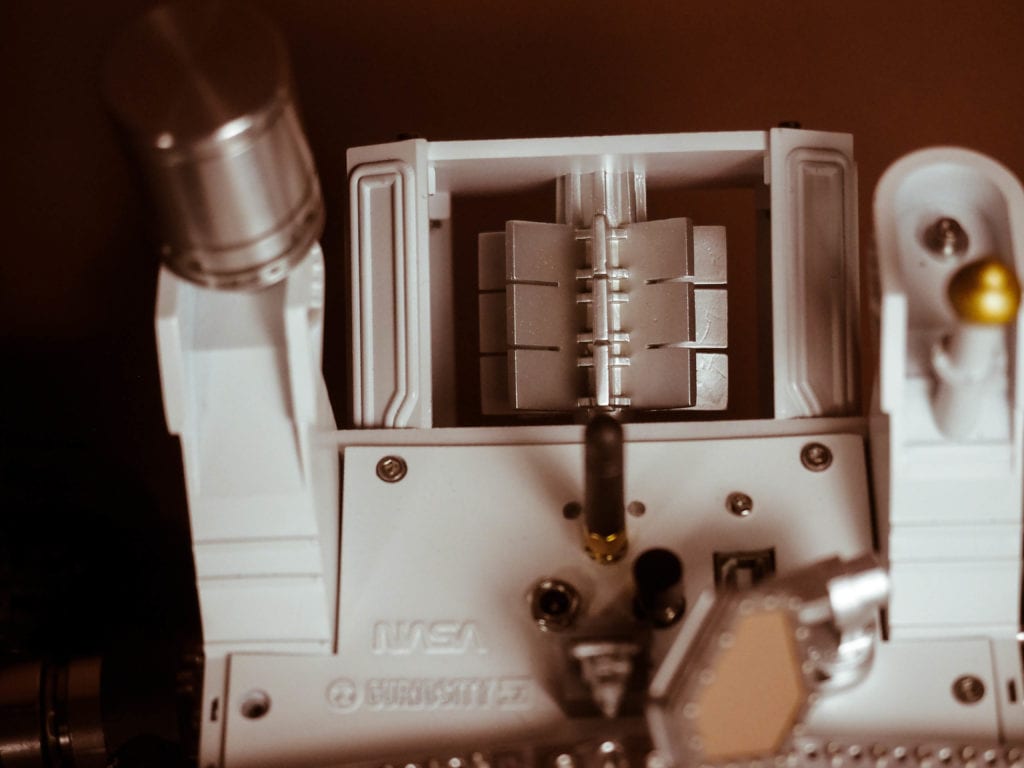
RADIOISOTOPE THERMOELECTRIC GENERATOR 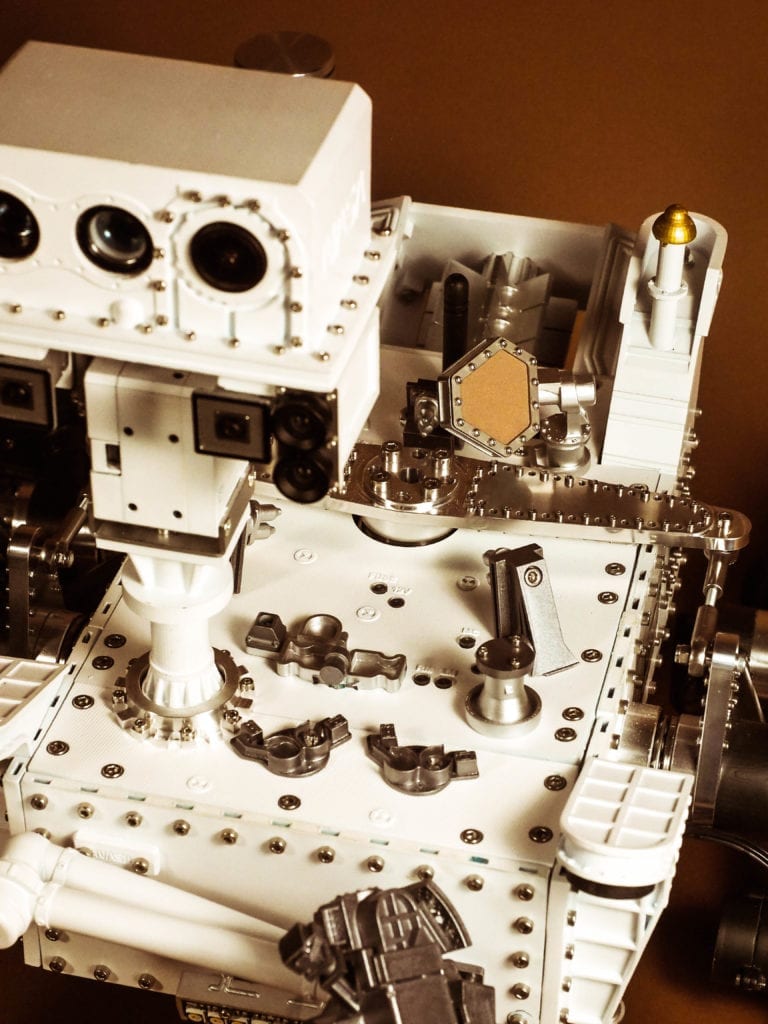
Top Deck 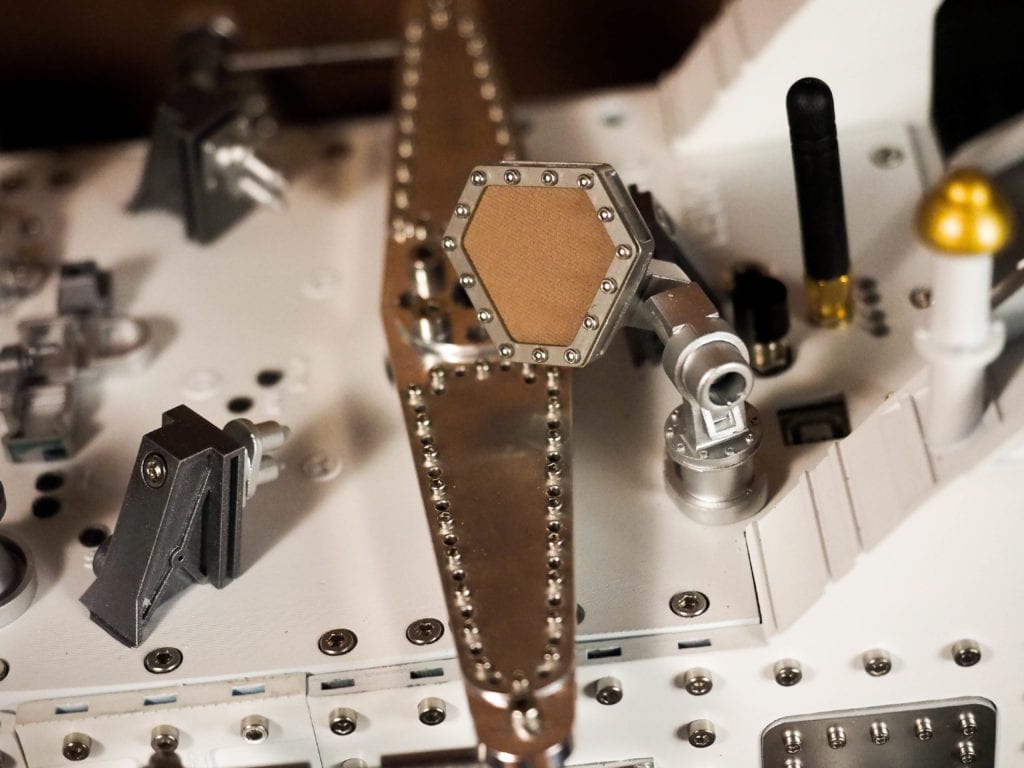
HIGH GAIN ANTENNA 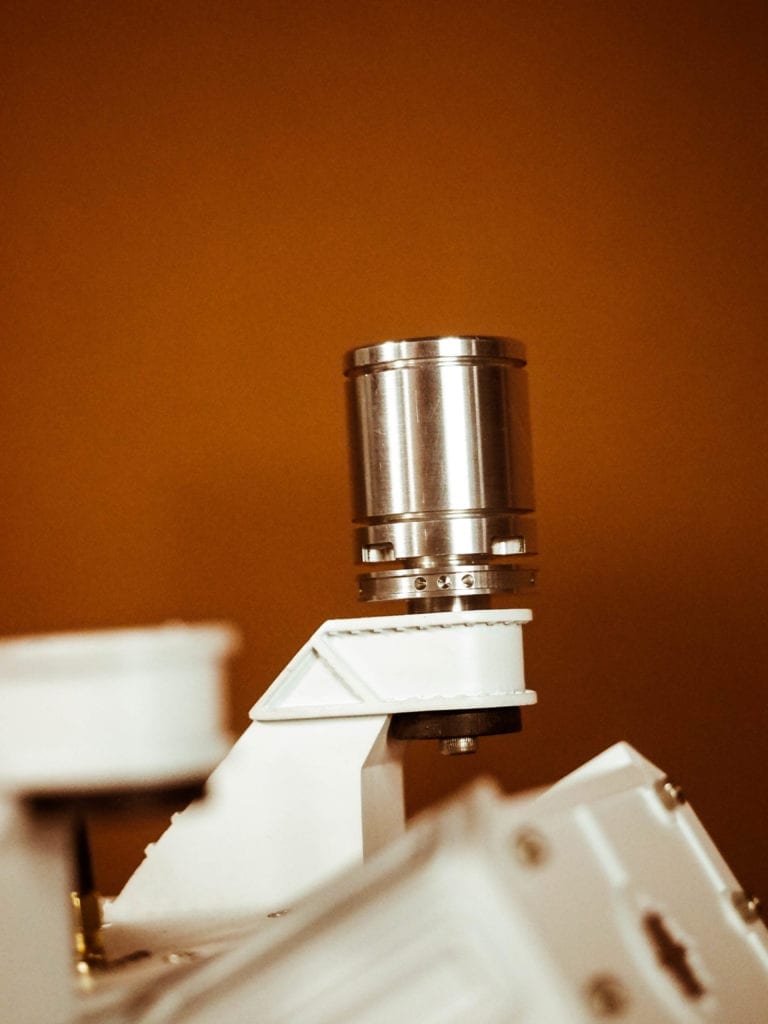
UHF ANTENNA 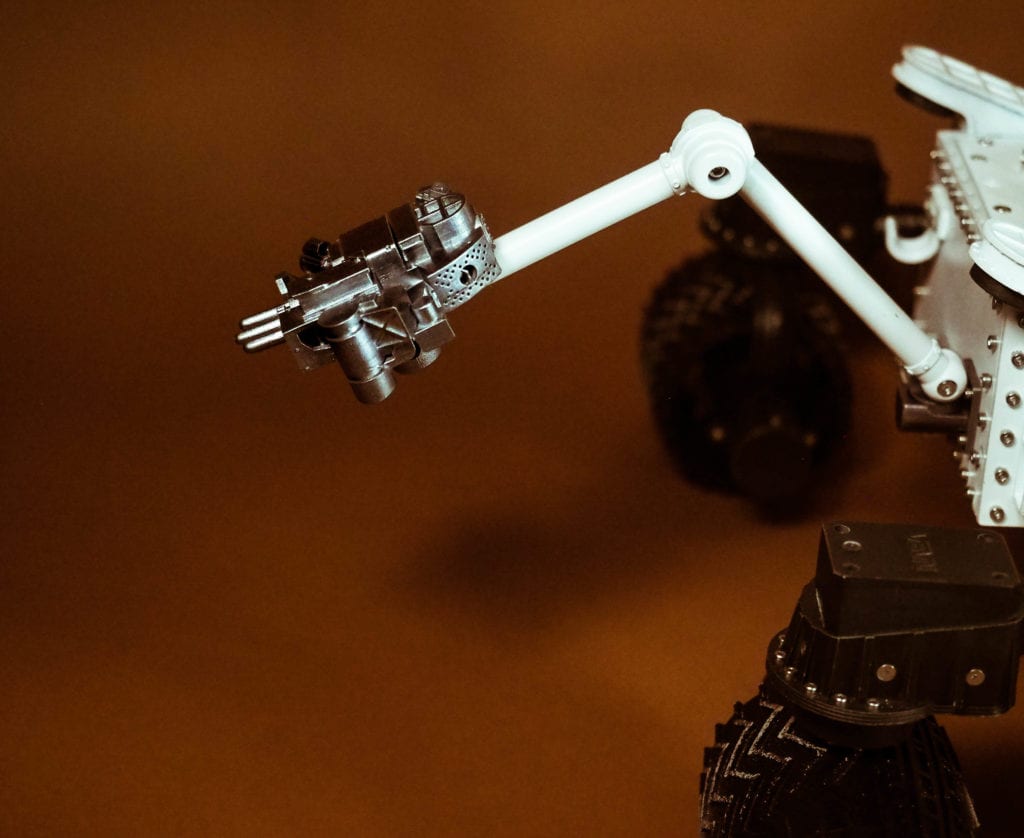
TURRET AND ARM 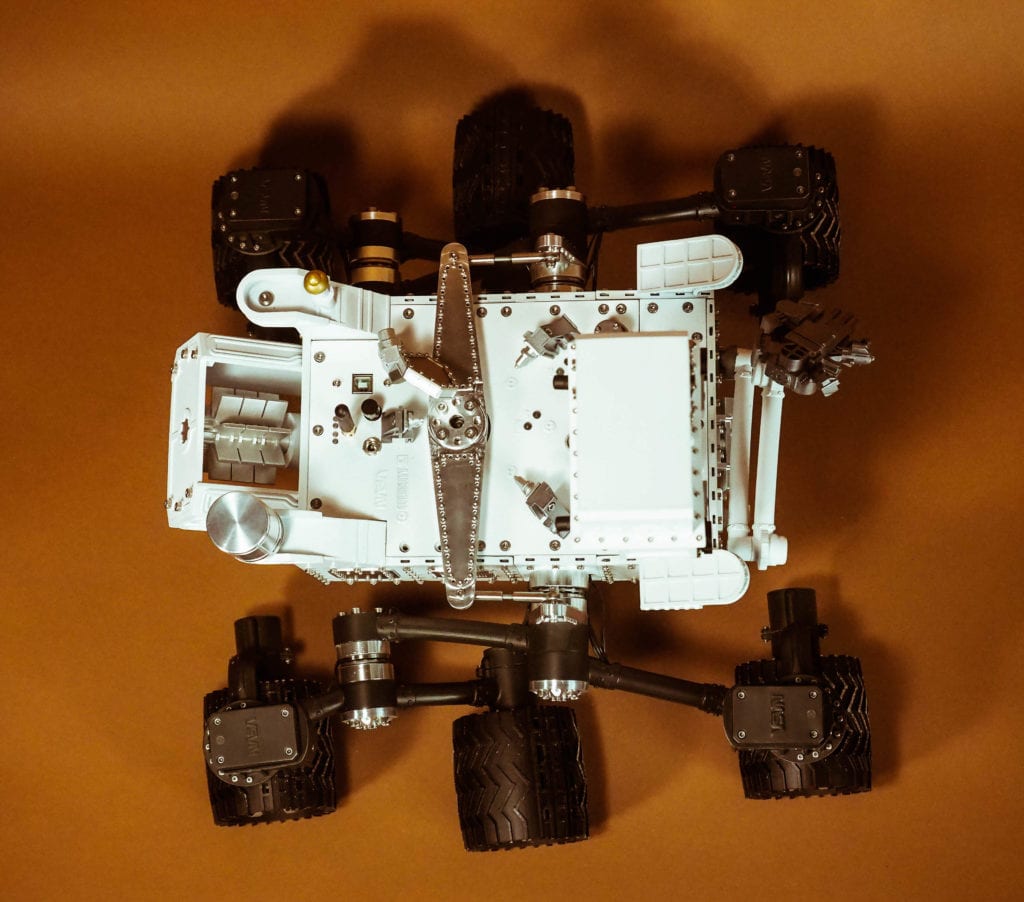
Top View 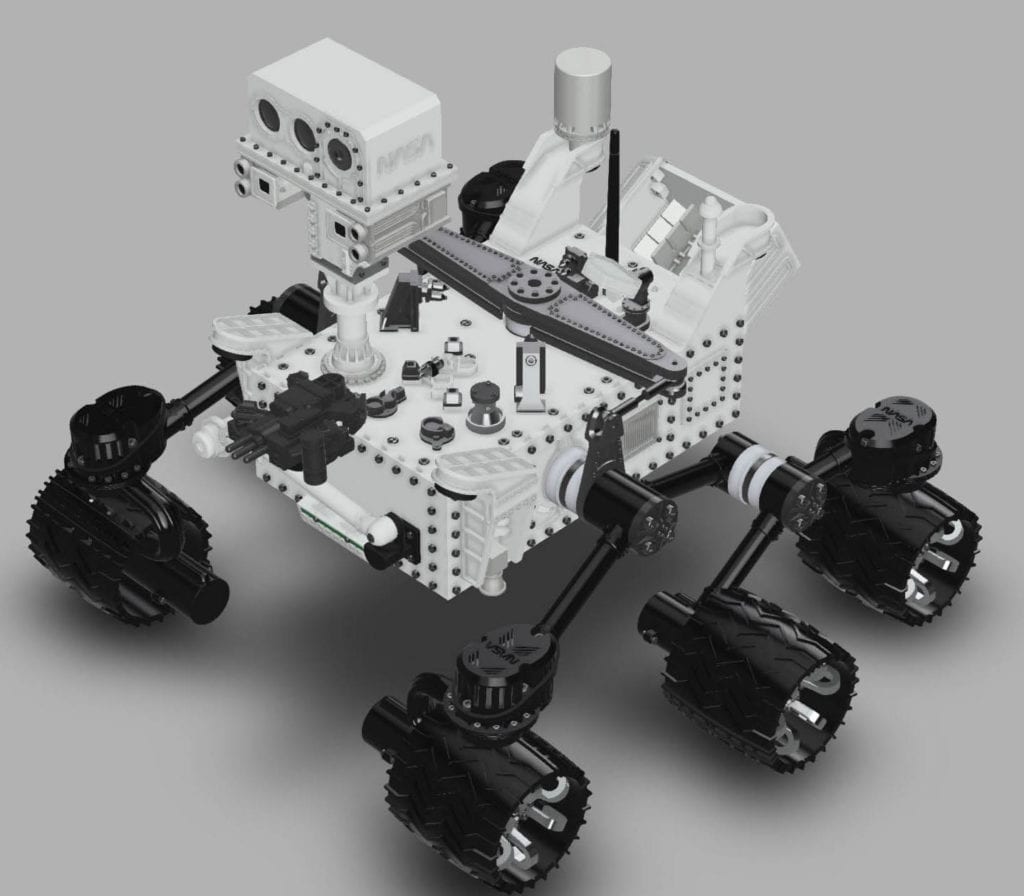
OUR FUSION 360 CAD MODEL 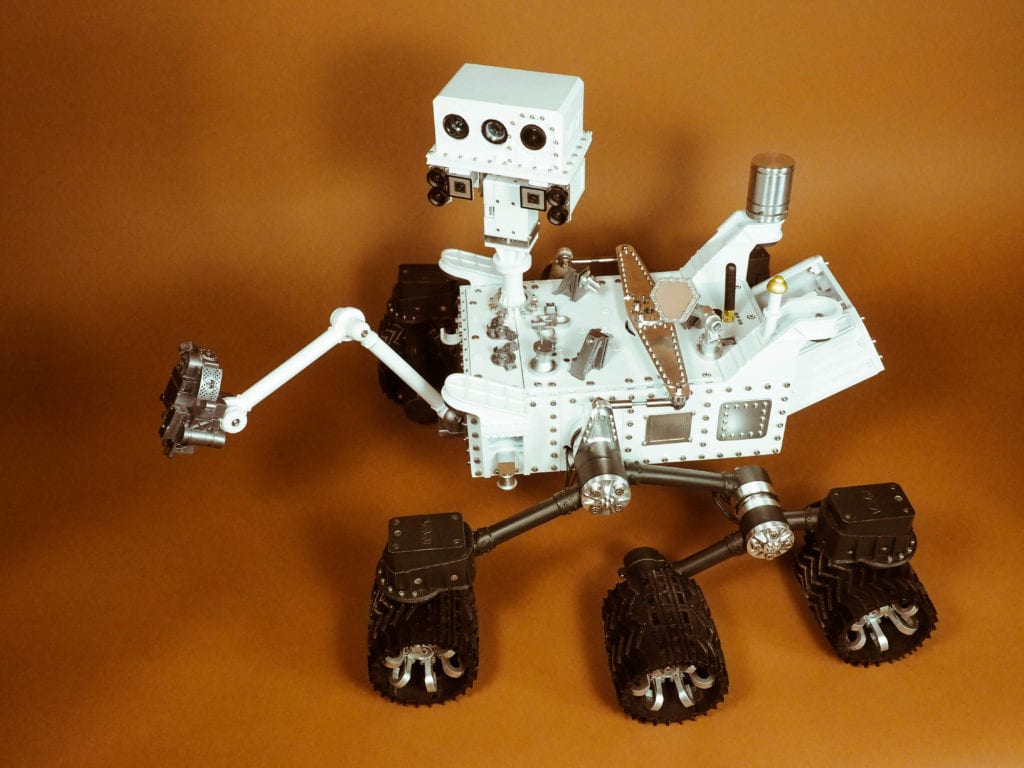
CURIOSITY MARS ROVER
