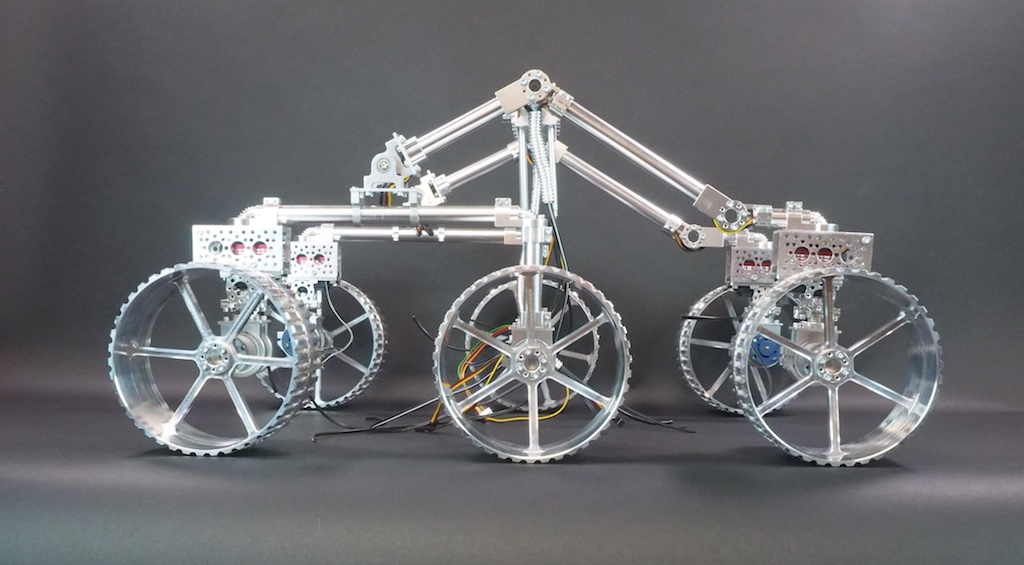
We've been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its...
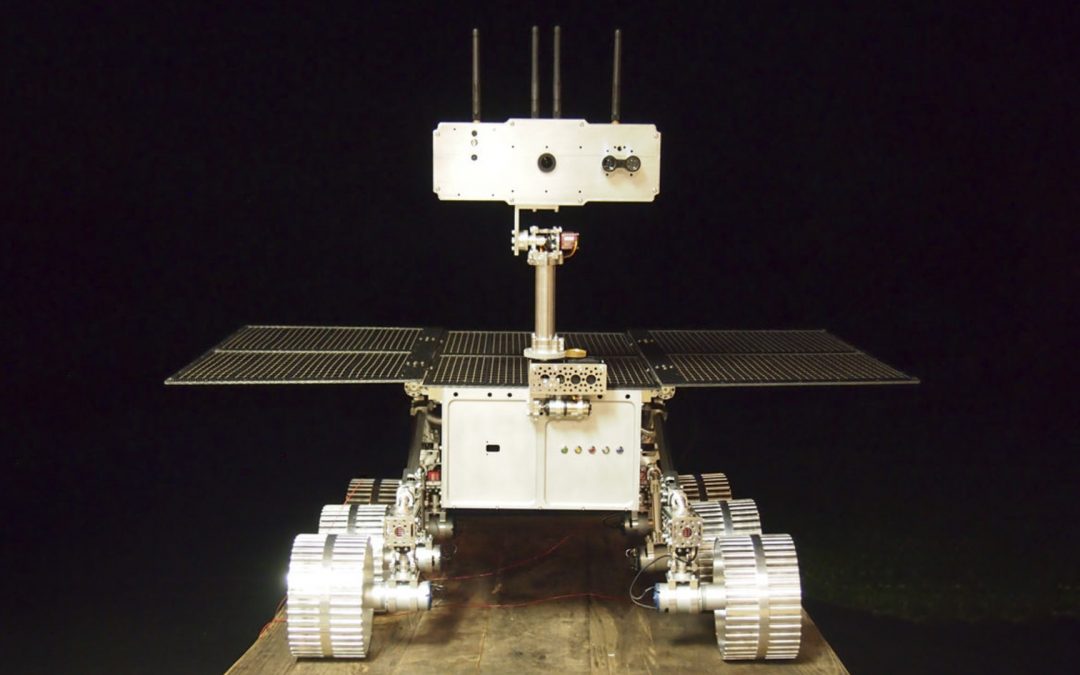
We've been working hard on the Lunar Rover for the aerospace company SpaceLS. Some of the photos show the robot in its...
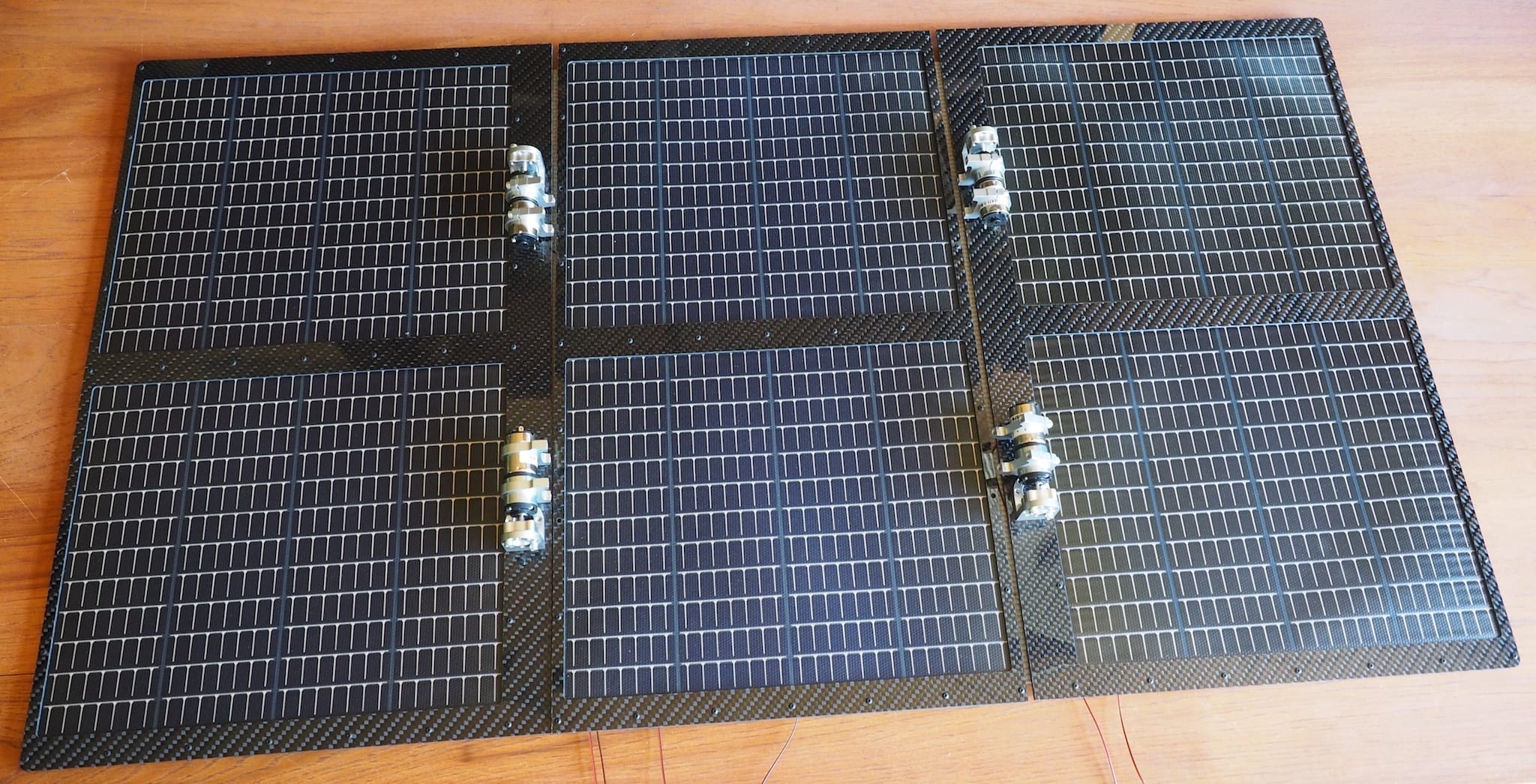
We have been working on the solar top for the Lunar Rover. The rover will use six 15.4V PowerFilm solar panels...
SpaceLS, a rocket company in the UK, has asked Beatty Robotics to team up with them to pursue a mission to put a rover...