by Camille | Robots, Slider, Workshop Blog
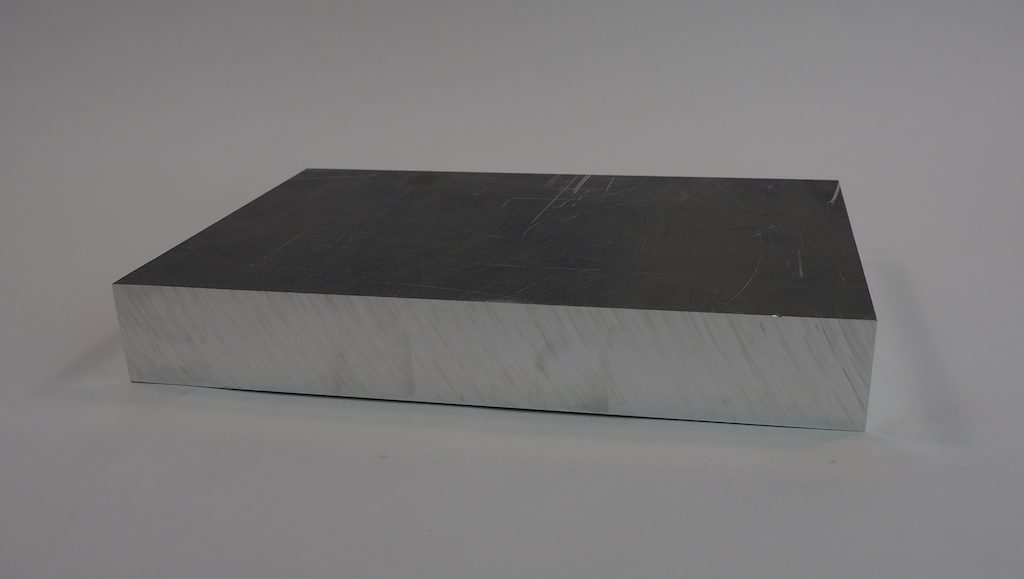
We’ve been working on a fun new robot we call Metalbot. Our goal was to build an autonomous rover with a unibody design that was machined out of a single block of metal. We started with this 13” x 9” x 1.75” block of 6061 aluminum:
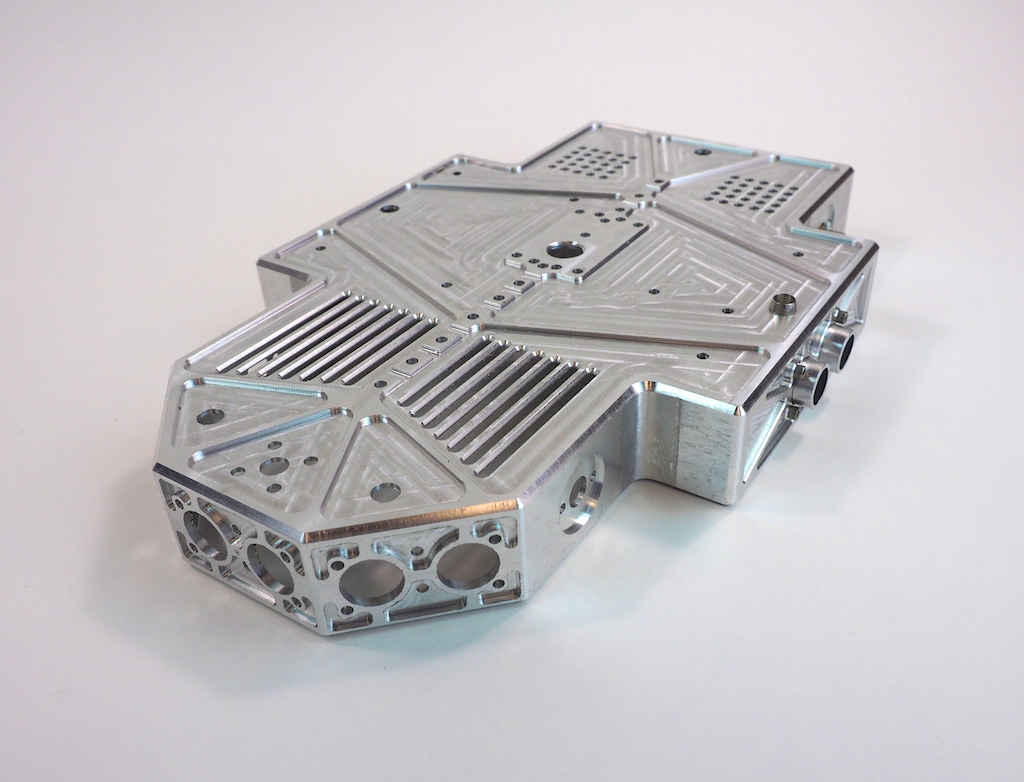
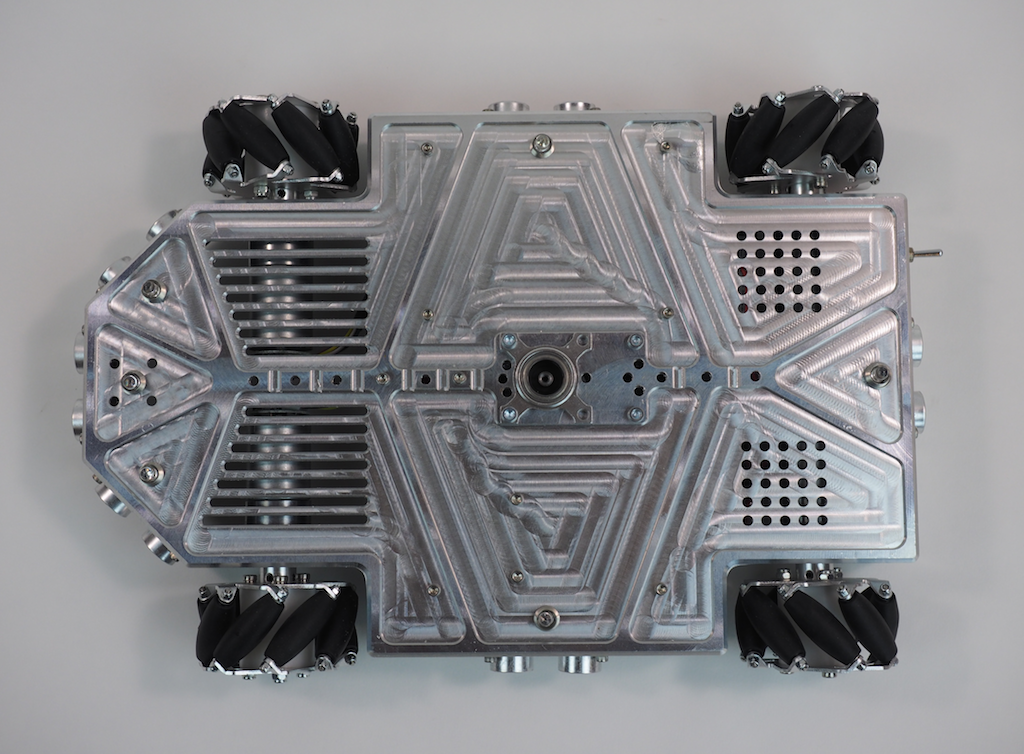
When the machining was done, the robot’s body looked like this. It’s a hollowed-out shell that is about 1/8” thick with holes, slots, and pockets for the motors, LEDs, sensors, and other electronics.
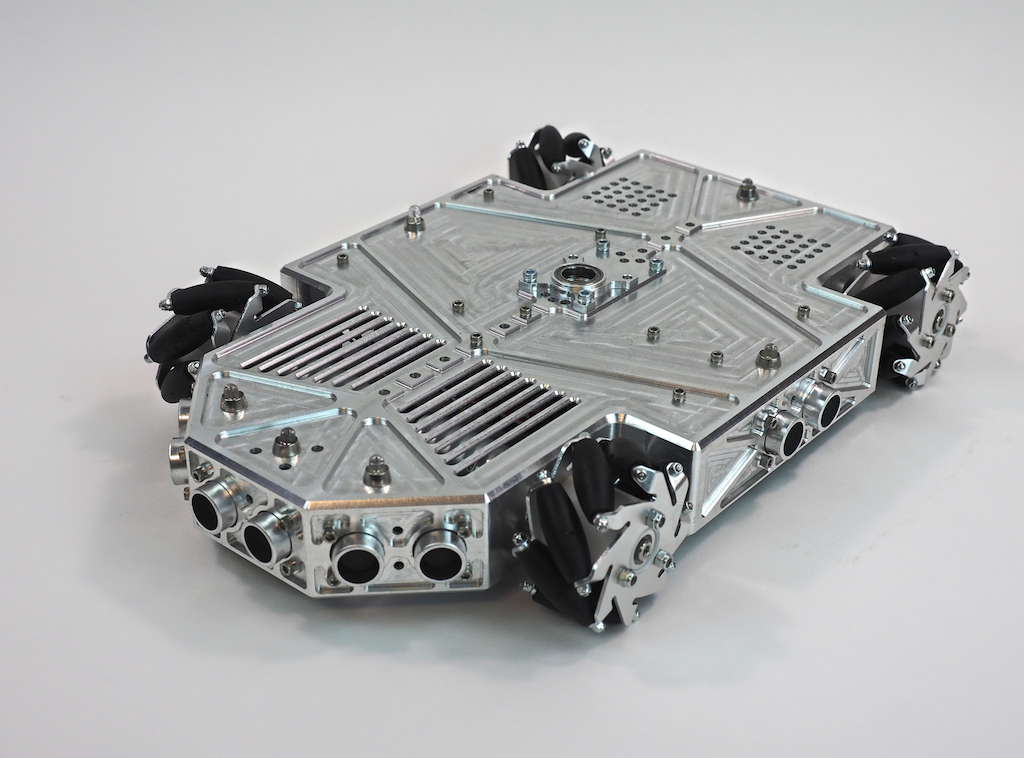
Once Metalbot was assembled with the internal components, it looked like this:
What do you think? We think it’s pretty cool looking. Do you like it?

Work-in-Process Pics
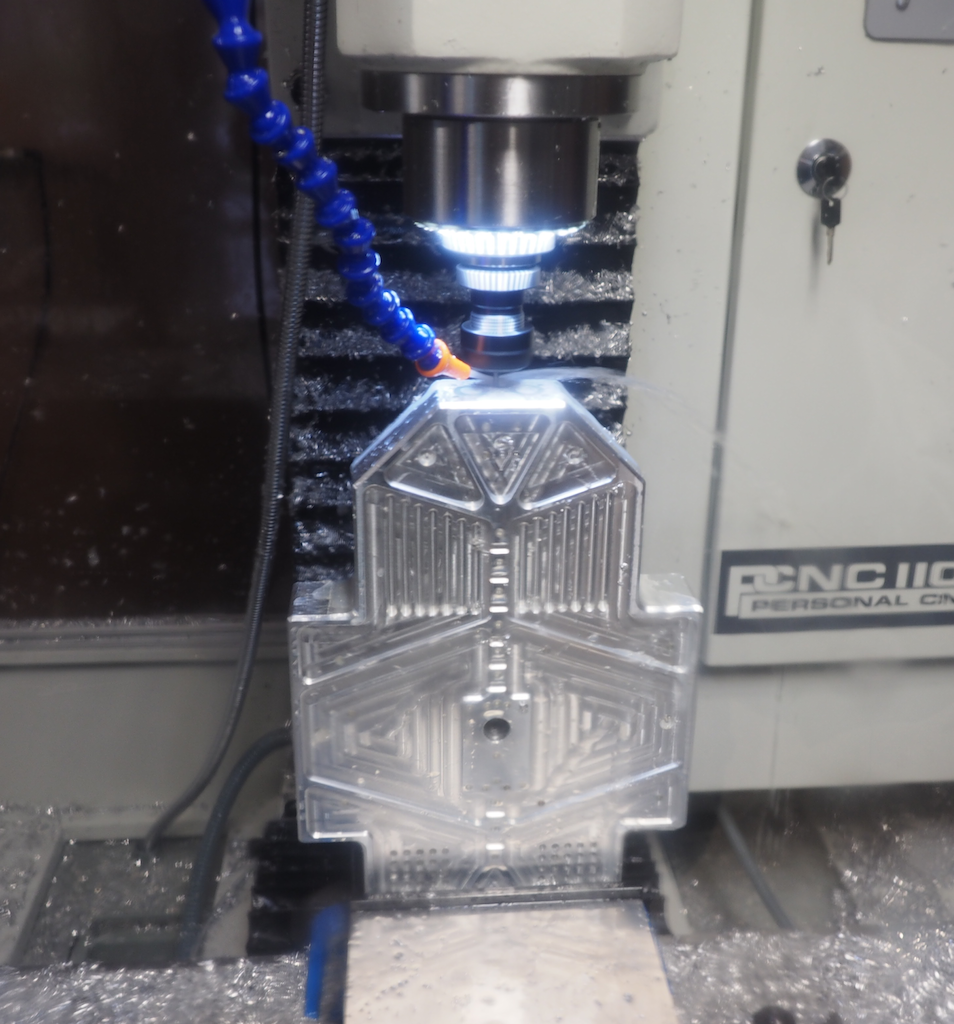
In this first picture (which was taken through the polycarbonate enclosure), we clamped the part vertically in the vise and we’re using an 1/8″ end mill to machine the detail on the front of the nose. In a previous operation we clamped the stock flat and machined the top of the robot, so that work is already done. Because this part has features on every side, machining it required us to clamp the stock in the vise in 8 different orientations: top, left side, right side, back, front, 45-degree left nose, 45-degree right nose, and bottom.
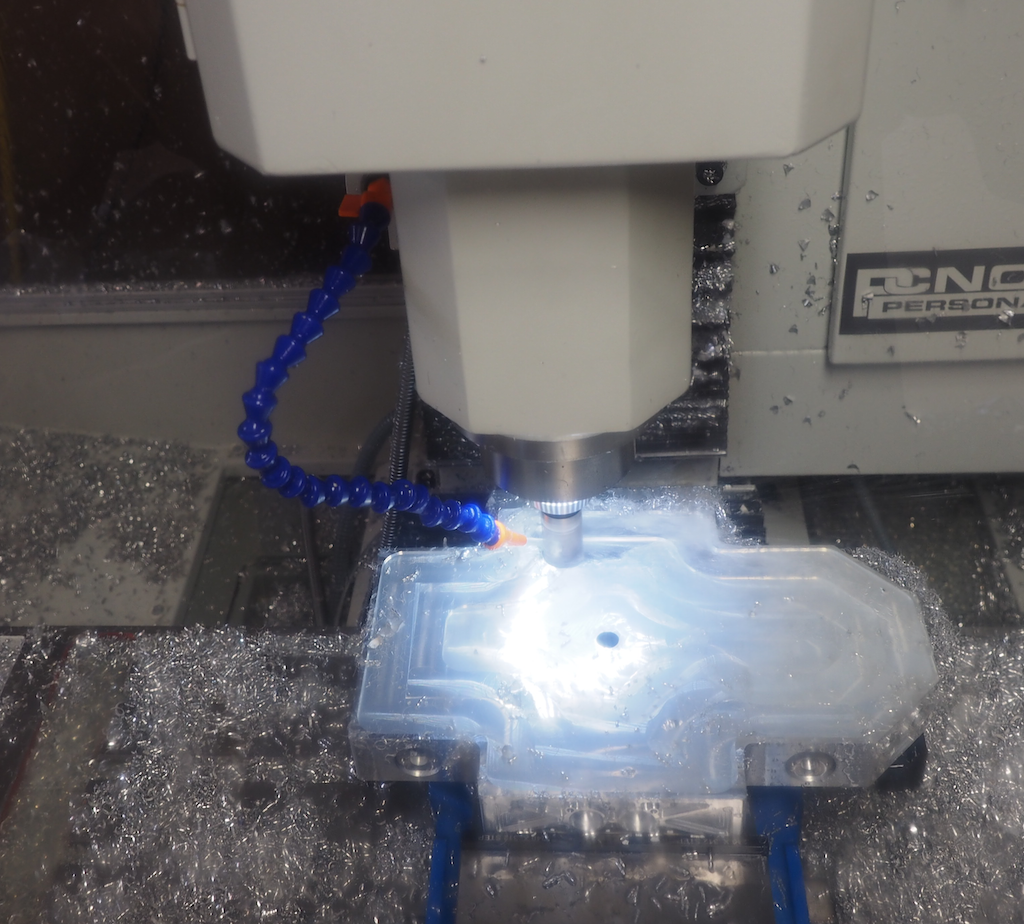
In this next picture, we’re on the last setup, machining out the large pocket on the underside of the robot. This turned the aluminum block into a 1/8” thick shell. The large pocket appears to be glowing because the ring of LEDs we installed around the mill’s spindle are shining into the coolant that has filled the pocket. We’re using a 25mm (.98”) modular end mill here, which is designed to remove material fast. Of course, there were a lot of metal chips, but it’s important to remember that aluminum is easy and efficient to recycle.
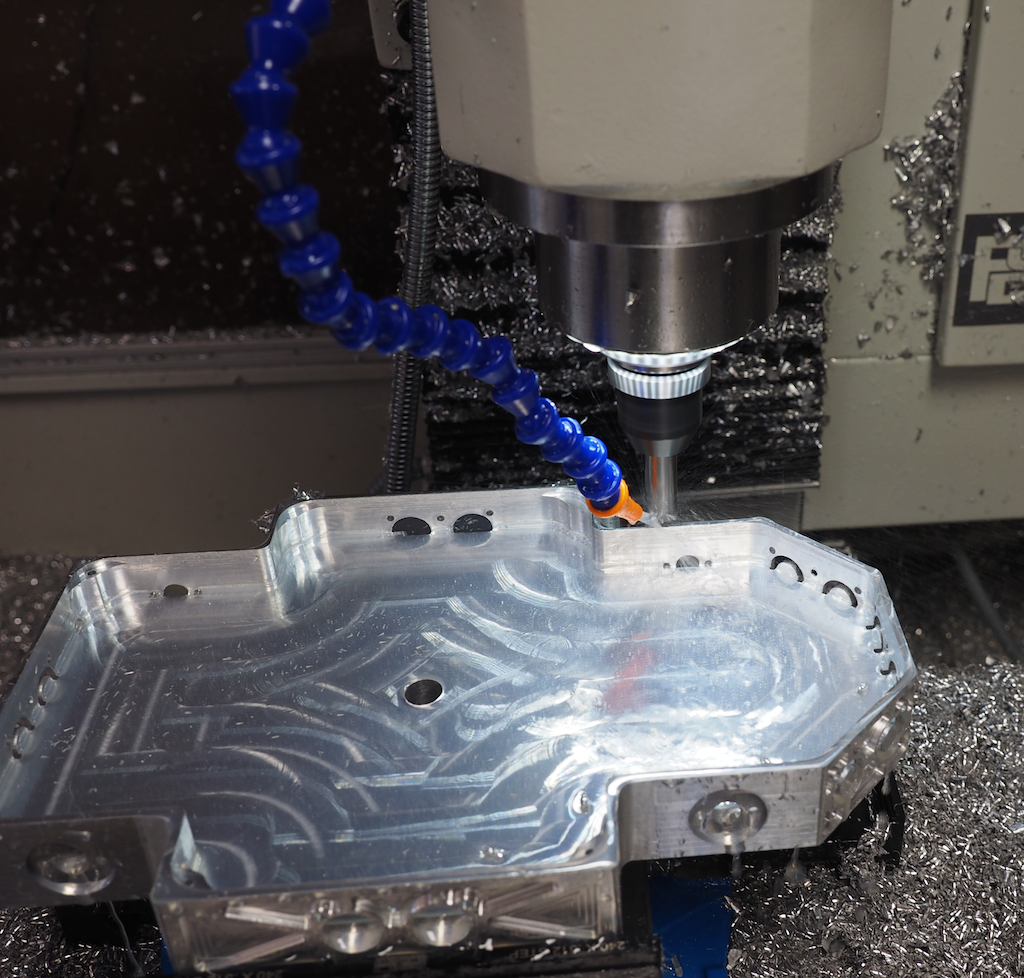
In this picture we’re half way done digging the pocket and we have the machine take a break from the hard work to chamfer the outside contour:
Once the body is machined, we screwed in the wheels, motors, and electronics, which are screwed upside down on the underside, where they are easy to access when the robot is turned over. We will install a bottom plate later.
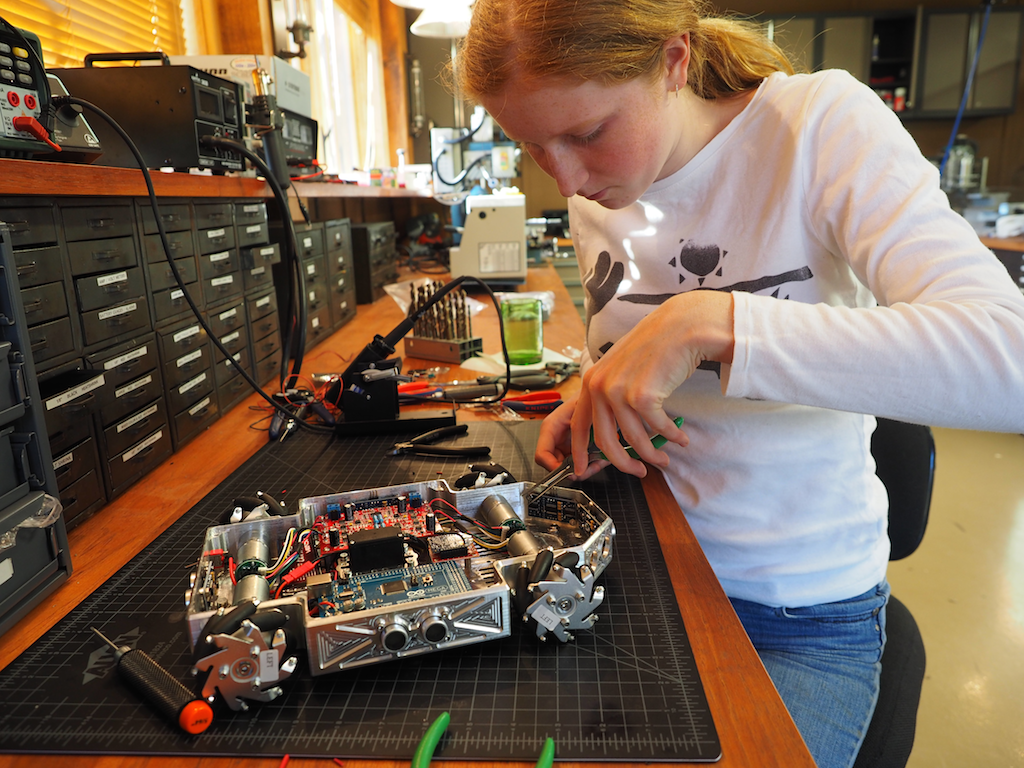
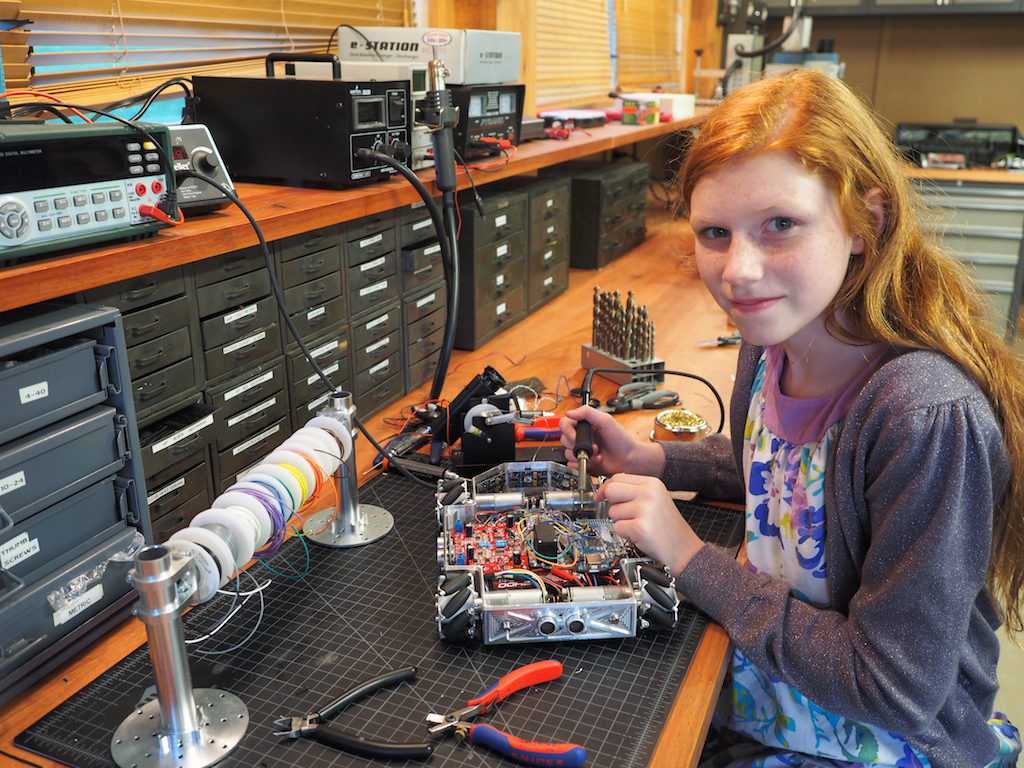
Then we did the wiring and soldering:
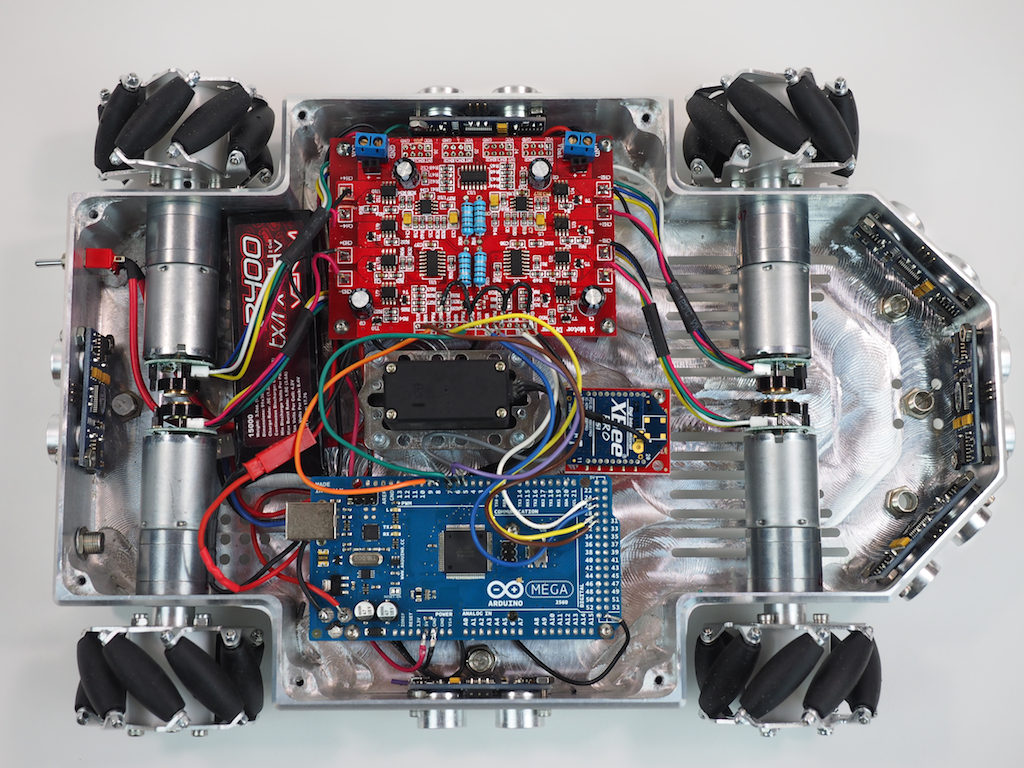
Here is the underside of the robot with most of the electronics installed. We’re using an Arduino Mega and a 4-channel Motor Controller, along with 4 Pololu gear motors to drive the mecanum wheels, which will allow the robot to strafe. The robot is also equipped with 6 Ping ultrasonic sensors for autonomous object detection, a LIPO battery, a main power switch, 6 NeoPixel RGB LEDs to indicate the state of each sensor, an Xbee Radio, and a panning servo (black thing in the middle). The robot will also be equipped with an MP3 module and speaker for sound, but those haven’t been installed yet.
The robot’s finished body is 8” wide and 12” long. The rover can be fitted with either the mecanum wheels shown or CNC-machined conventional wheels (not shown). Our original goal was just to machine a cool looking rover out of a single piece of metal, but as we went along, we decided to add some flexibility into the design for future enhancements in case we wanted to do more with it. The robot has been designed with a central spine of holes and ridges for attaching future add-ons, including a servo mounted in the center, which will support a pan-tilt turret for a camera, gun, or arm. We have designed the pan-tilt turret to utilize the Actobotics ecosystem, but other pan-tilt mechanisms could also be used. There are also holes on the front and rear of the top deck that are compatible with the full range of Actobotics components such as brackets, hubs, and channels, which really adds a lot of flexibility.
The next step is to work on the sensors and software programming. With its mecanum wheels, it should be able strafe like a champ very soon.
Here are a few more pictures of Metalbot so far. Let us know what you think. Do you like the overall design?


by Camille | Non-Robot Projects, Tools and Workshop, Workshop Blog
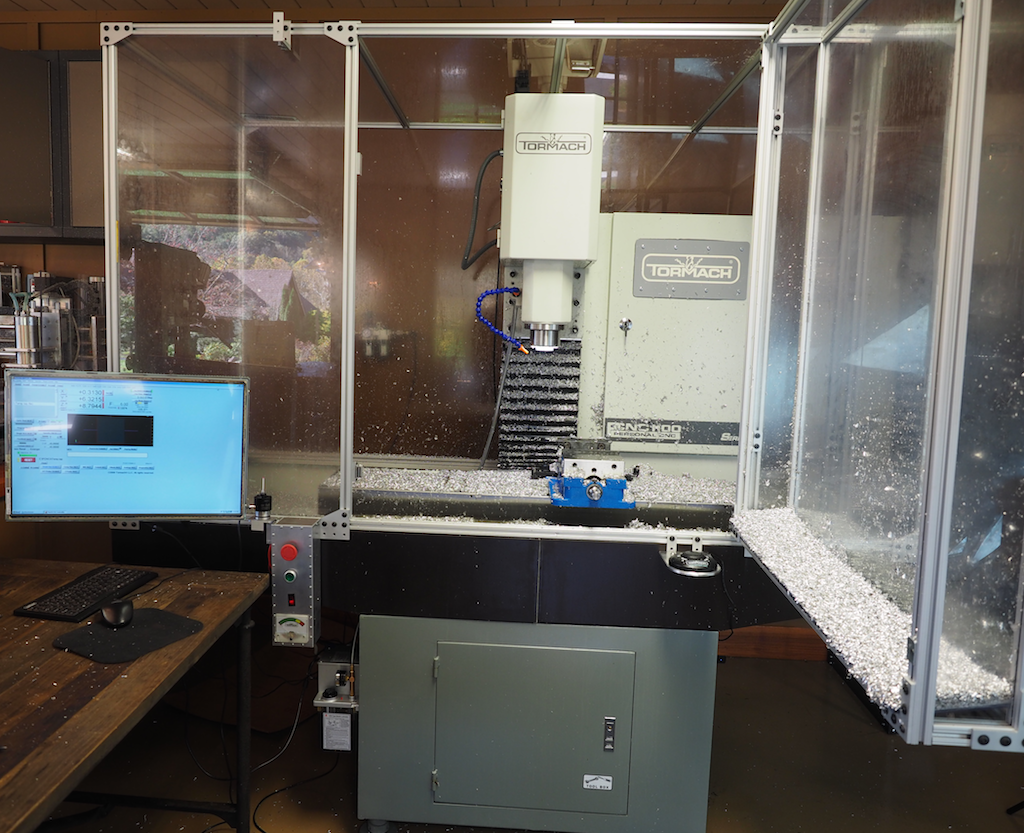
At Beatty Robotics, we’ve made good use of our gantry-style CNC mill over the last few years. We’ve built all our robots to date with it. Recently we decided to augment our machining capability with a vertical CNC mill. Our current mill has been excellent for machining large flat parts out of sheet aluminum, but now we wanted to be able to machine parts that were deeper and more three dimensional, as well as use coolant and a greater variety of tools. After extensive research of all the various machines available, we decided on a Tormach 1100. We bought and installed the base Tormach machine, then extended it with various add-on kits and our own customizations to turn it into a lean, mean milling machine. We’ve only had the mill for about a month, but we love it so far. The Tormach’s capabilities, features, and price are geared toward professional machinists, small businesses, and prototype shops, so the Tormach isn’t affordable for most hobbyists, but it is an excellent machine. In future posts, we’ll show you some of the parts we’ve made, but for now, here are some details on our installation.
The base machine weighs 1130 pounds, so in addition to the mill itself, we purchased Tormach’s stand kit to make sure we supported the machine properly. The chip tray’s bright white color didn’t fit too well in our shop, so we painted it oil rubbed bronze (in case you were wondering why it doesn’t look like other Tormachs you’ve seen). We then constructed a full enclosure of our own design using 80/20 and 1/4” polycarbonate plates. The enclosure keeps the flood coolant and chips contained, reduces shop noise, and improves safety. Part way through the building of the enclosure we ran out of the metal plates and brackets we needed. It was late on a Friday night and it stopped our project dead in its tracks. No problem. We jumped on the CAD system, designed the parts, and machined them on the mill. Very cool.
The control panel on a standard Tormach is located on the electrical box just to the right of the spindle, which put it inside the enclosure, so we rewired the electrical controls so that they were accessible from outside the enclosure. We also simplified the controls to just what we needed: Emergency Stop, Start, Computer Power Button, and Spindle Load Gauge. Everything else is controlled via the computer screen.
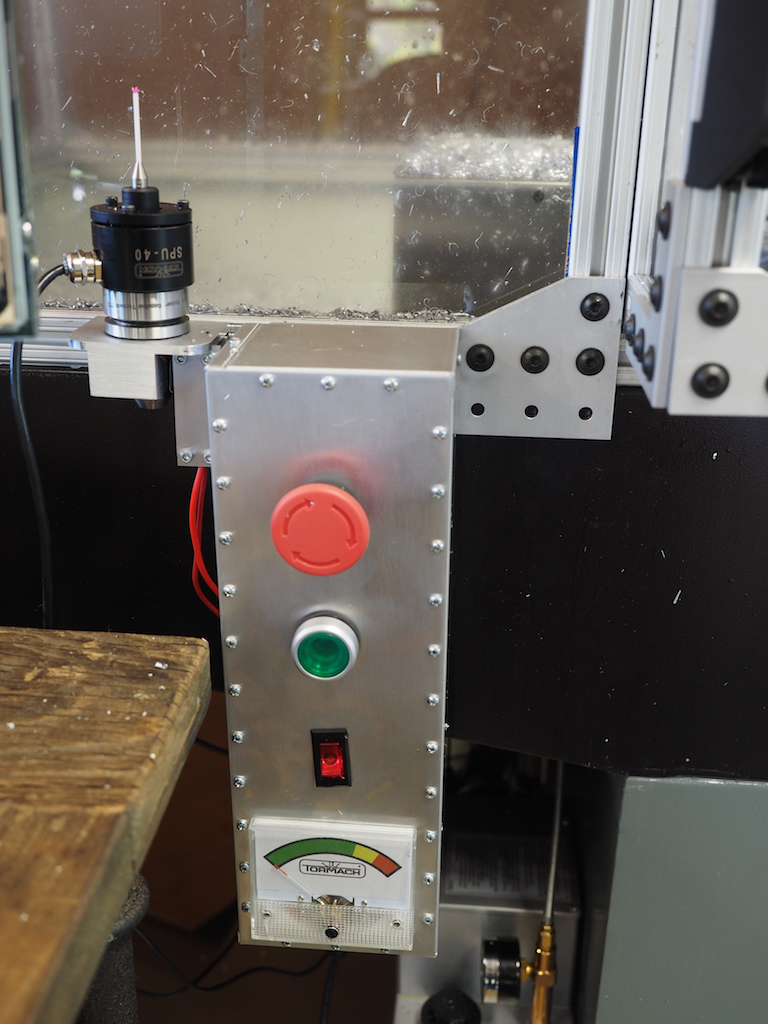
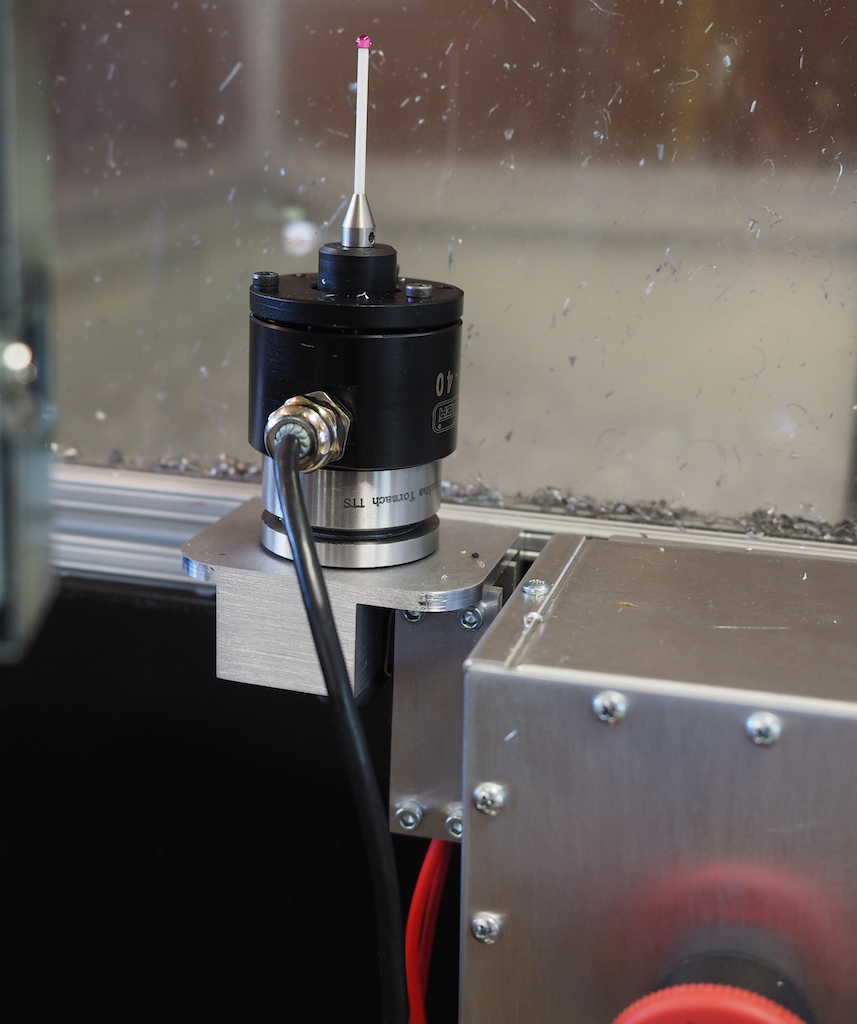
When we setup a part in the machine, we use an electronic touch probe, which allows us to find the X, Y, and Z position of the workpiece very precisely, which is critical to making good parts. We love using the probe, but the problem was that there is a bug in the Mach3 software’s probe wizard. In some cases, when you run the probe wizard, Mach3 turns on and spins the spindle, which yanks out the probe cable, whips it around at high speed, and destroys the probe. To make sure this never happened to us again, we wired the spindle power through a custom bracket we designed with a high-amp lever switch. When the probe is resting in the bracket, which is now its normal storage location, then the spindle will operate as usual. But when we pull the probe out and put it in the spindle for probing, the lever switch will cut power to the spindle so it can’t spin even if the buggy software tells it to. It was a really nice way to fool-proof and simplify the job setup procedure. [Important April 2015 UPDATE: Tormach now offers their new own, internally-developed Path Pilot software instead of Mach3. Path Pilot is a much better, more robust approach for running the Tormach. And best of all, this was a free upgrade to all previous Tormach owners!].
In the picture below, you can see the probe resting in the custom switch bracket we designed in SolidWorks and then machined on the Tormach.
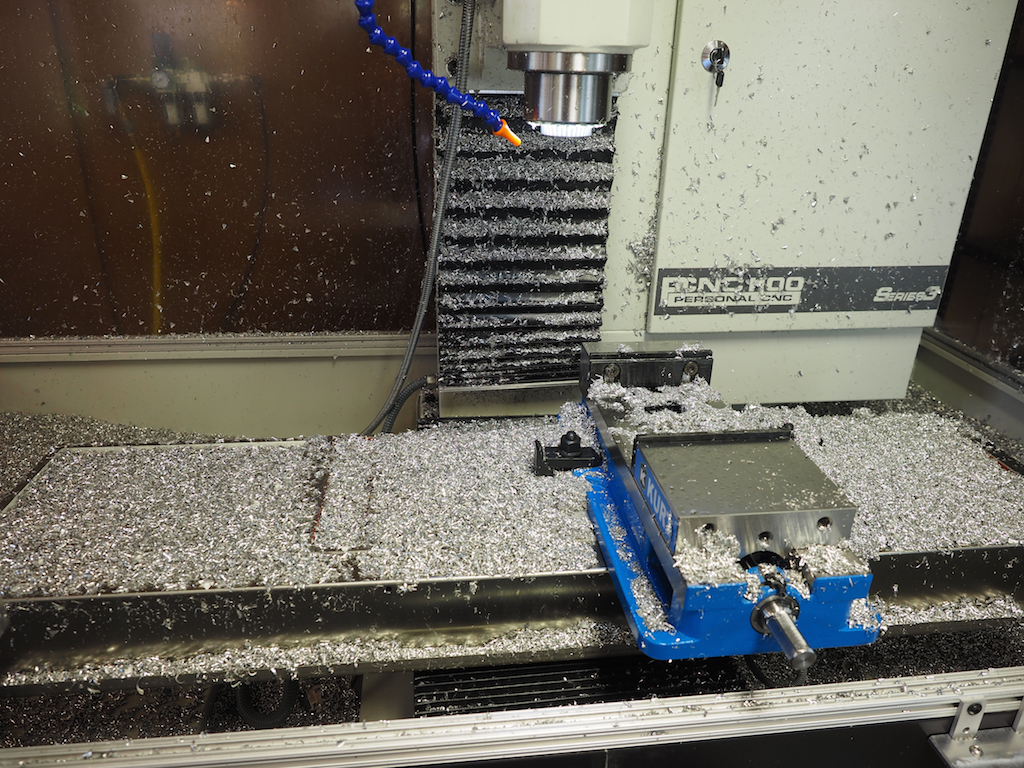
Clamping and fixturing is often the most time consuming and troublesome part of running a job, so we put significant time into figuring out the best approach for our particular situation. After studying all the different kinds of parts we plan to machine, we designed our fixturing system around a 6” Kurt Vise with quick-change SnapJaws. Our goal was to leave the vise in the machine for 95% of our jobs. One of the trickiest elements of building the enclosure was to make sure that the vise didn’t hit the enclosure wall during the machining operation. It’s hard to tell from the picture, but the large door on the front of the enclosure is actually extended out 5” from the rest of the enclosure in order to give the vise plenty of room when the table is moving. Here’s a picture of the Kurt vise mounted into place, where it was promptly buried beneath a mound of chips.
The mill with the enclosure door open.
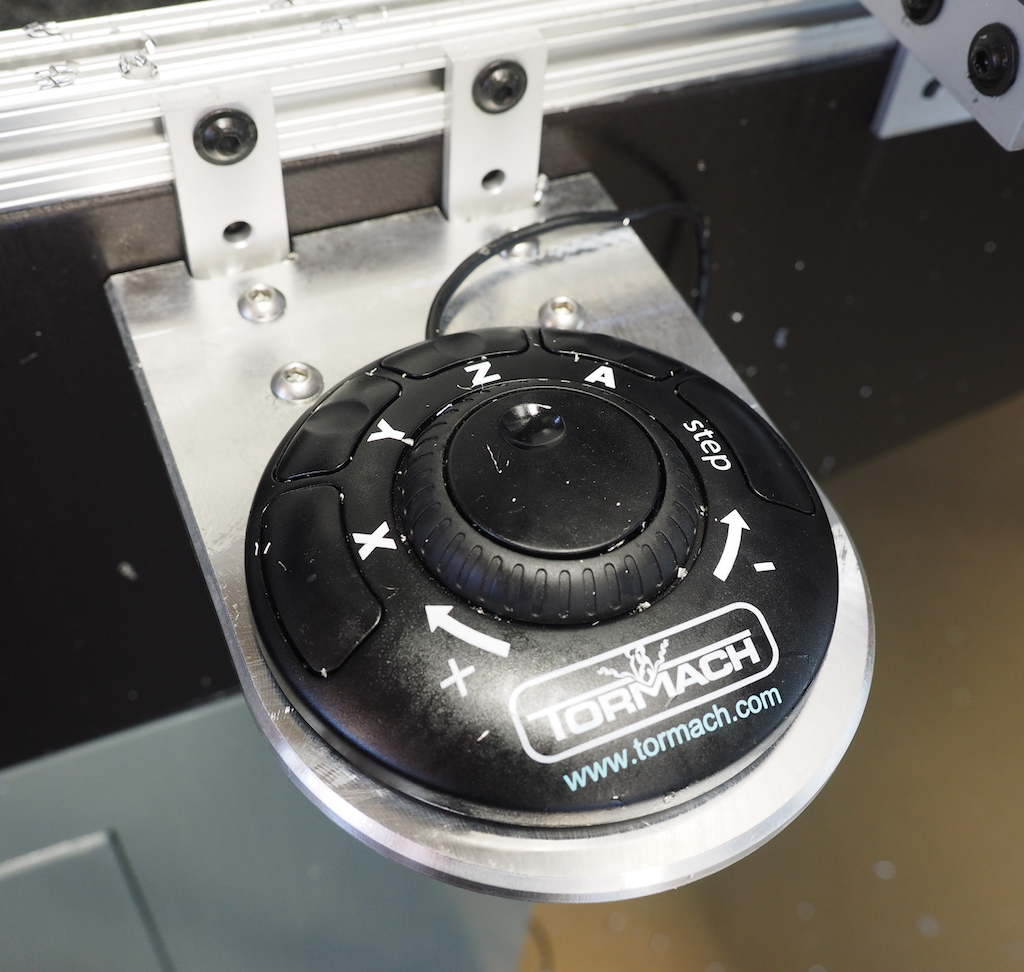
We also designed and machined a bracket shelf so that we could place the jog controller exactly where we wanted it, hovering on the right side just below the door so that we could use it whether the door was open or not.
One of the best things about the Tormach is the Tormach Tooling System (TTS). It’s a well thought out approach to standardizing and simplifying tool heights so that mid-job tool changes are super fast and accurate. Here’s a picture of the tools and tool holders we have so far. The beauty of this system, especially when combined with the quick-change capability of Tormach’s compressed-air-powered drawbar option, is that you can change tools in a few seconds and be certain that the new tool is in the exact position it needs to be. This means that you can use the right tool for each portion of the job without worrying about changeover issues. Our tools include various sizes of end mills, chamfers, radius tools, modular insert mills, a fly cutter, engravers, drills, and taps. It has really expanded our capability.

We are looking forward to making many interesting parts with our new machine. I would like to thank the folks at Tormach for designing and building such an excellent mill, and for their email-based assistance when we had questions. I would also like to thank our friend and colleague Mike Dutra here in Asheville for his help during the installation process. His confidence with a 2-ton engine hoist moving around a 1130 pound hunk of iron was very helpful. He also helped out in many other areas of the installation process. Also, a special shout out to John over at CNC NYC. If you’re into machining, be sure to subscribe to his YouTube channel. Finally, I would like to give a nod to Camille and Genevieve who couldn’t wait to start using the machine. They started using it even before we had finished the enclosure (chips were a-flyin’ fast and far) and they have already proven themselves to be excellent machine operators. They’ve both made some great parts already and it’s just the beginning. We’ll keep you posted.
by Camille | Non-Robot Projects, Workshop Blog
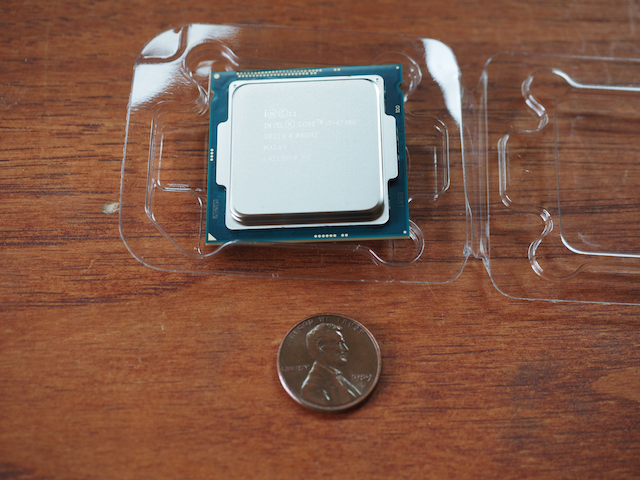
At Beatty Robotics, we love building custom computers. Our latest computer project is a “Mini CAD System” for doing Computer Aided Design. Our goal was to build a small, but very powerful computer for running Solidworks and our CAM software HSMWorks. The computer required a super-fast CPU, a discrete Solidworks-approved graphics processor, plenty of RAM, a SSD hard drive, and the ability to run Windows 7 or 8 (Solidworks requires Windows). We also wanted to be able to customize the computer and overclock the processor to maximize its speed. After doing the necessary research to make sure everything was going to fit our requirements and work together without compatibility problems, we selected these components:
Intel i7-4790K CPU (4.0 Ghz / boost to 4.4 Ghz)

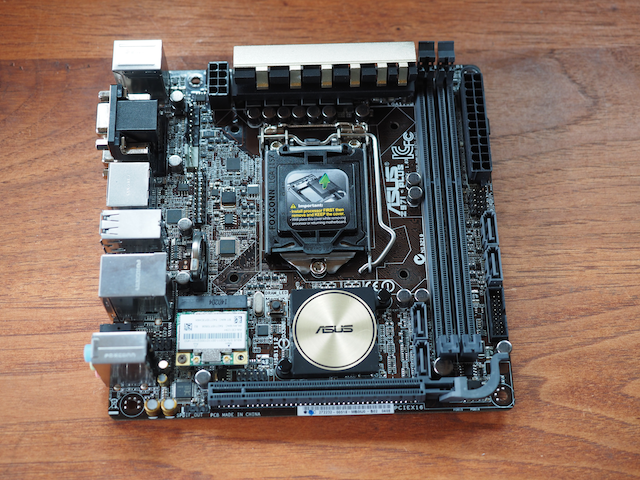
Asus Z971-PLUS Mini-ITX motherboard

16GB RAM (Crucial Ballistix)

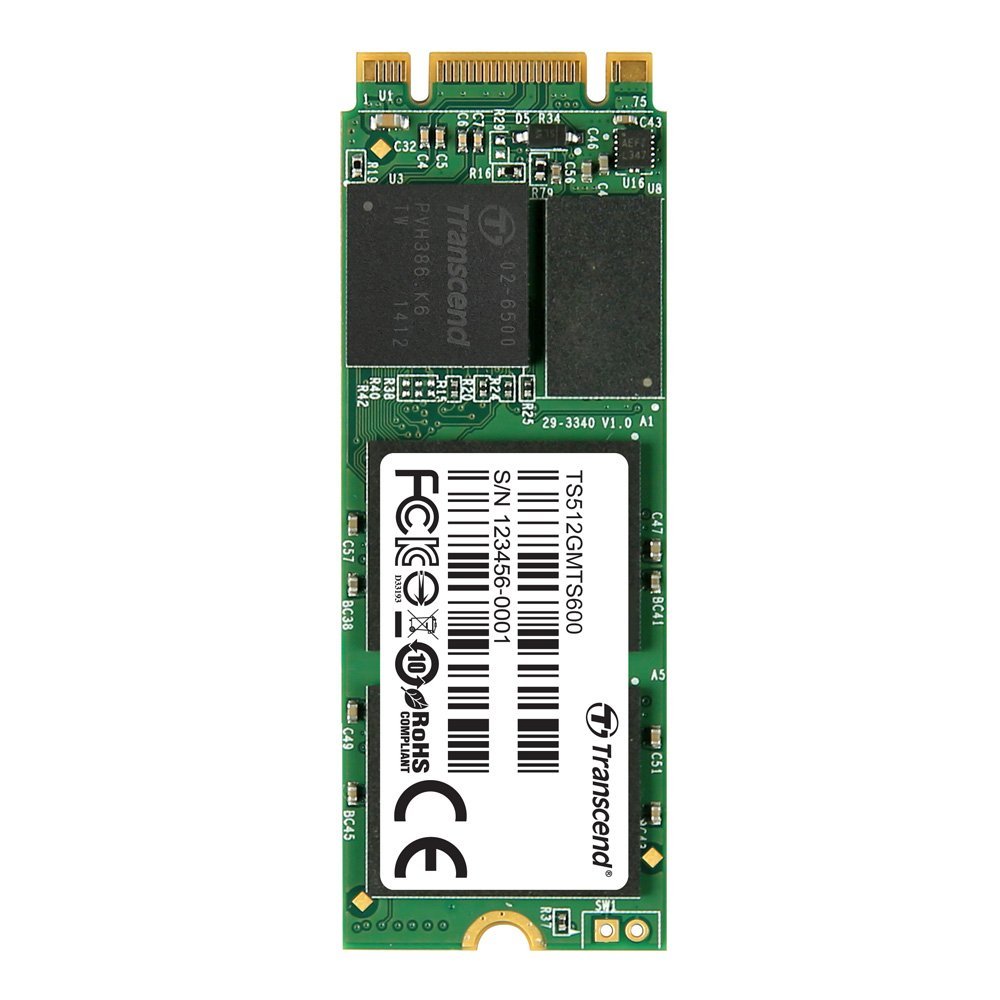
512GB Transcend M.2 Solid State Drive (SSD)
It’s hard to tell from this picture, but this “hard drive” is TINY, just .86″ x 2.36″ x .088″. It fits into a slot on the underside of the motherboard. Incredible.

Sapphire AMD FirePro V4900 PCIe Graphics Processor

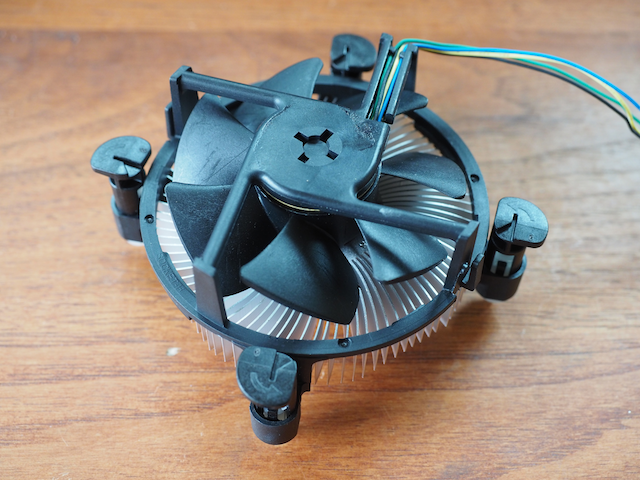
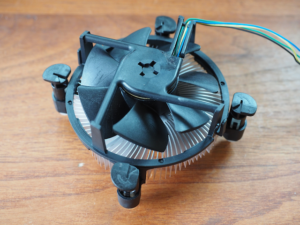
Intel CPU Fan
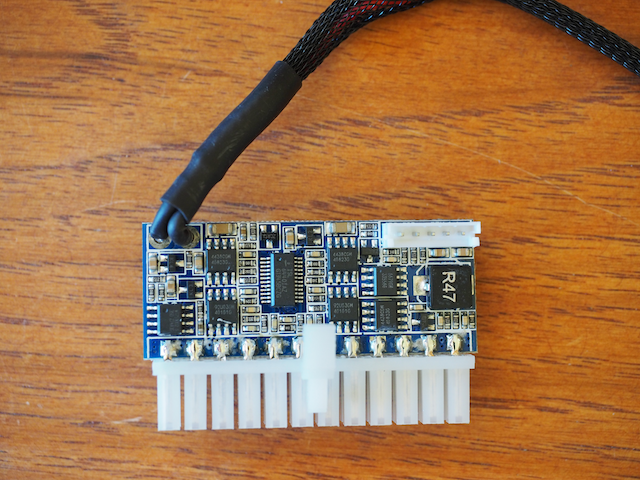
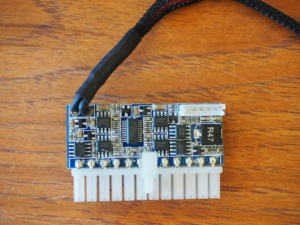
Streacom ST-NANO150 Power Supply
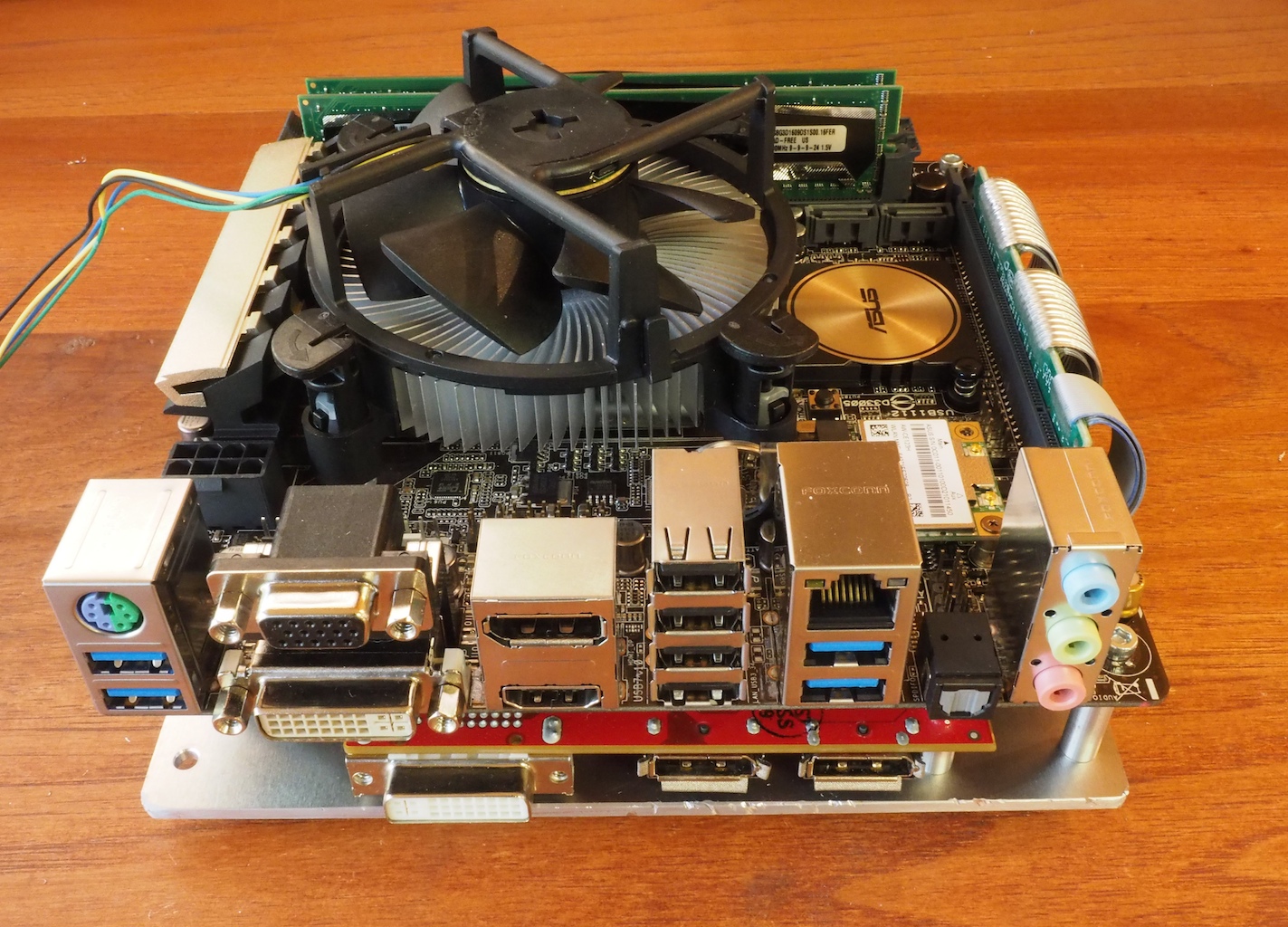
We have the computer assembled, configured and running. Here’s what it looks like so far. We’ve mounted everything on a sandwich of metal plates that we machined. In order to reduce the overall height of the computer, we mounted the graphics card horizontally beneath the motherboard and used a long PCIe “riser” cable. We’ve never seen this done before, but we’re hoping it will work. Everything seems to run fine, including SolidWorks.


So far, so good. It’s 6.7″ square, which is very small for a fast, powerful CAD system. The next step is to build a case for it. There are many excellent commercial cases available for Mini ITX motherboards, but most of them have lots of extra space for a large power supply, conventional hard drives, and an optical drive, all of which we’ve eliminated from our design. The cases that are very small don’t have space for the graphics card. So, we decided it would be fun to design and machine our own small case using our CNC. We haven’t started that part yet, but we’ll keep you posted on how it goes.
by Camille | Robots, Slider, Workshop Blog
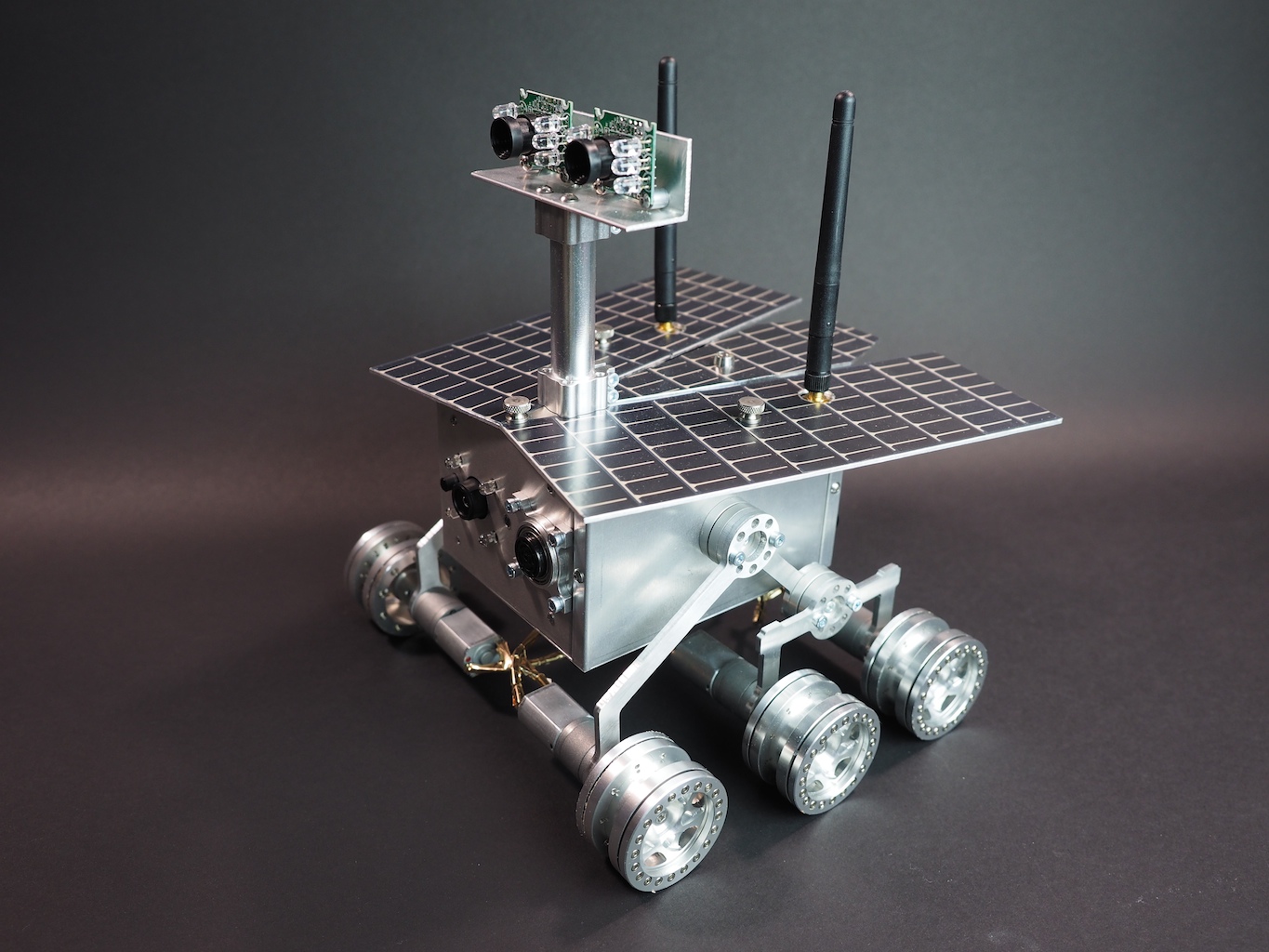
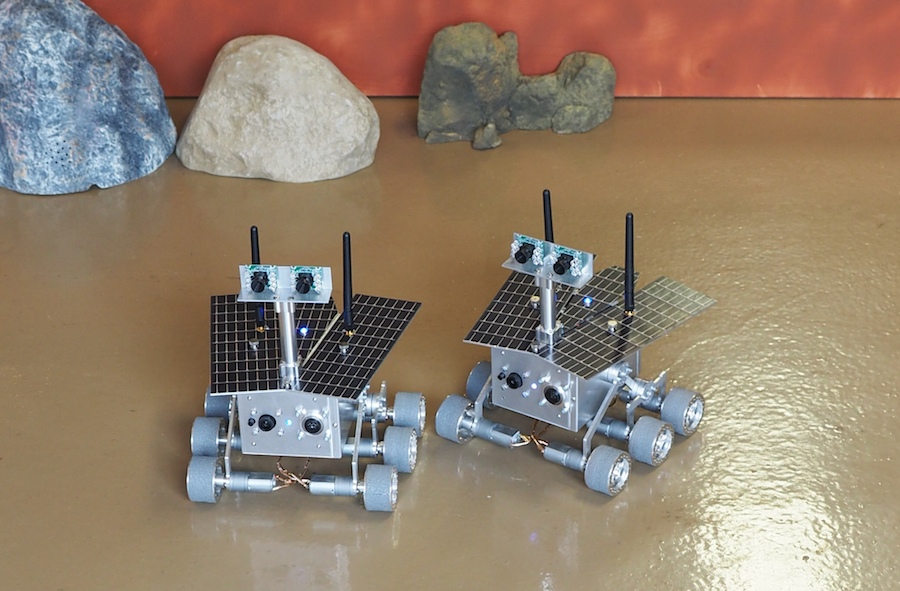
We have just completed and shipped two new Mini Mars Rover exhibits to Petrosains, The Discovery Centre in Kuala Lumpur City Centre.
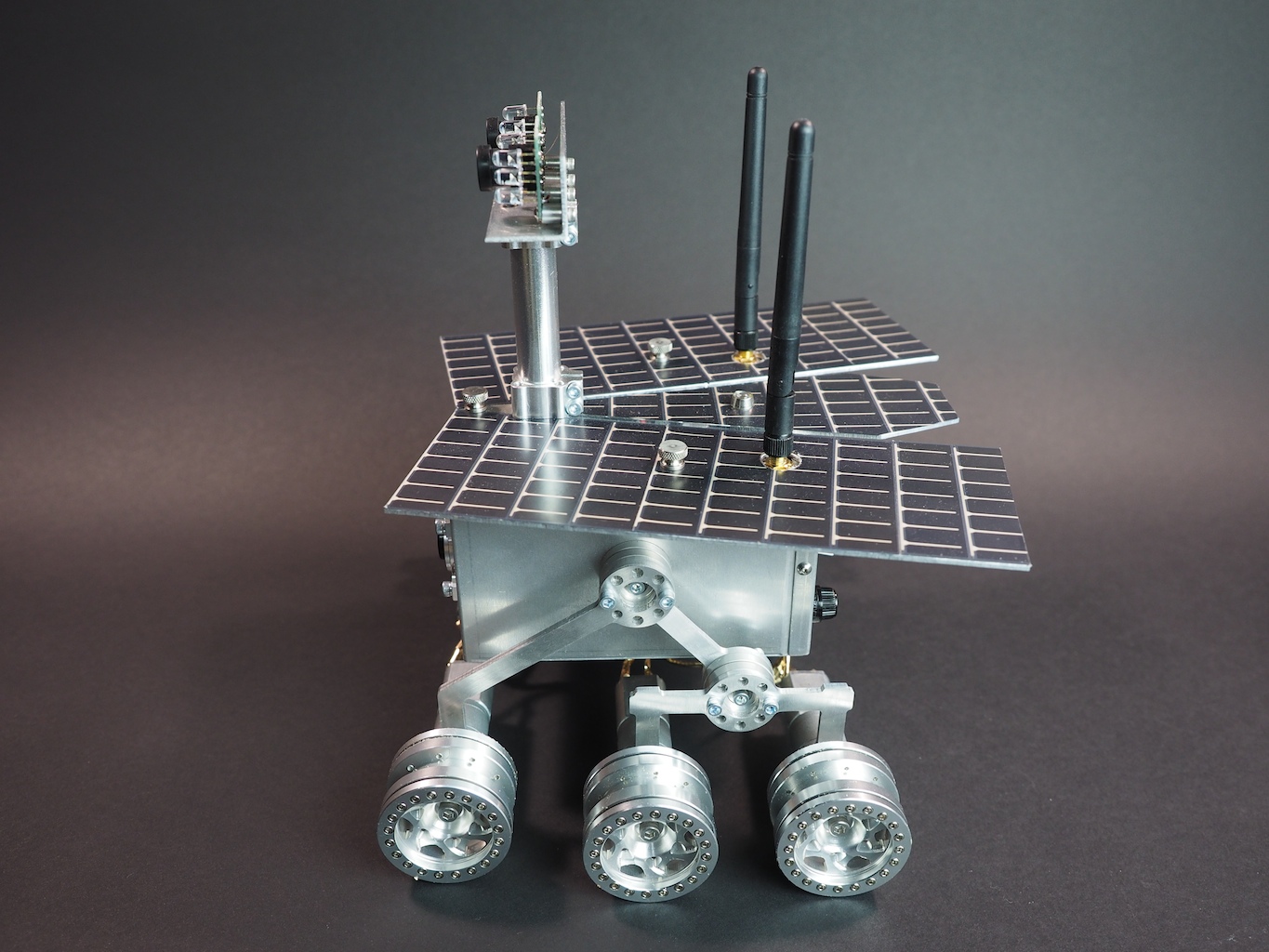
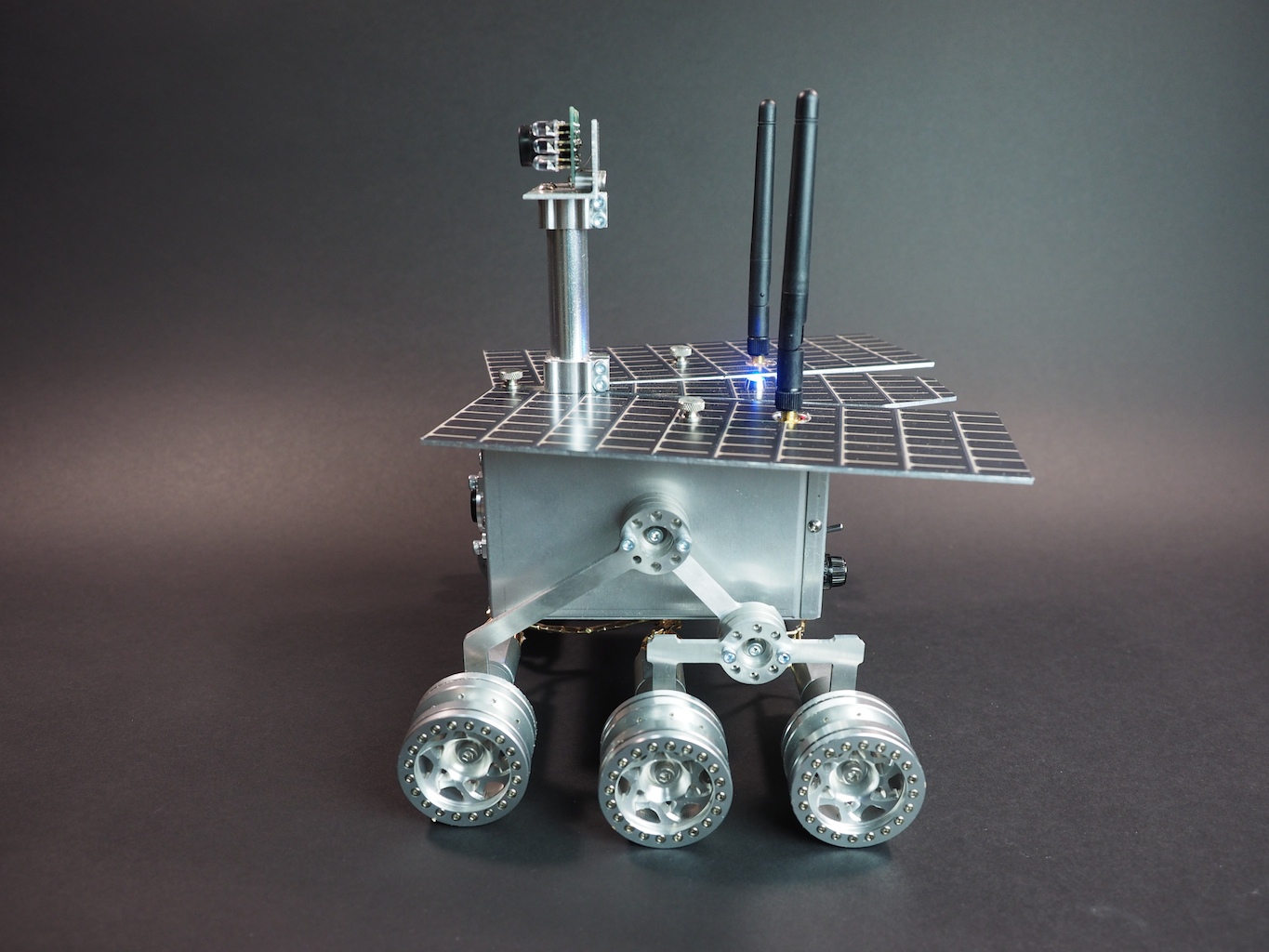
Although very small in size, these little robots pack some excellent features. They have a simplified, CNC-machined rocker-bogie suspension system, thin film solar panels, LED indicator lights, six small but powerful gear motors, an Arduino Nano microcontroller, front and rear sonars for object avoidance, a voltage sensor for battery charge monitoring, an audible battery alarm, an on-board battery charge jack, an Xbee radio, and a high-resolution infrared camera. They operate via real-time Remote Control and/or autonomously in conjunction with our “Mars Rover Controller” software. These two robots will be used as functional hands-on exhibits at two different locations. The exhibits are scheduled to open in November, 2014. So, the next time you’re in Malaysia, go check it out.
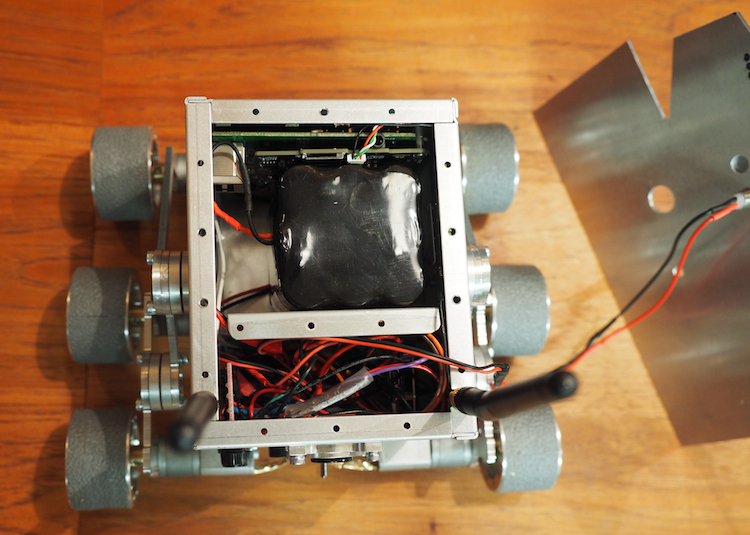
With the top removed, you can see the inside of the robot. We crammed the camera and a sonar sensor at the front. The wifi module (not visible) is attached to the side. The Arduino microcontroller, rear sonar, voltage sensor, motor controller, fuse, battery alarm, xbee radio, two antennas, and power switch are all crammed in the back section. This leaves the center area for a huge 10,400 mAh 7.4V Lithium-Ion battery (black square in center), which will allow the robot to last a long time on one charge.
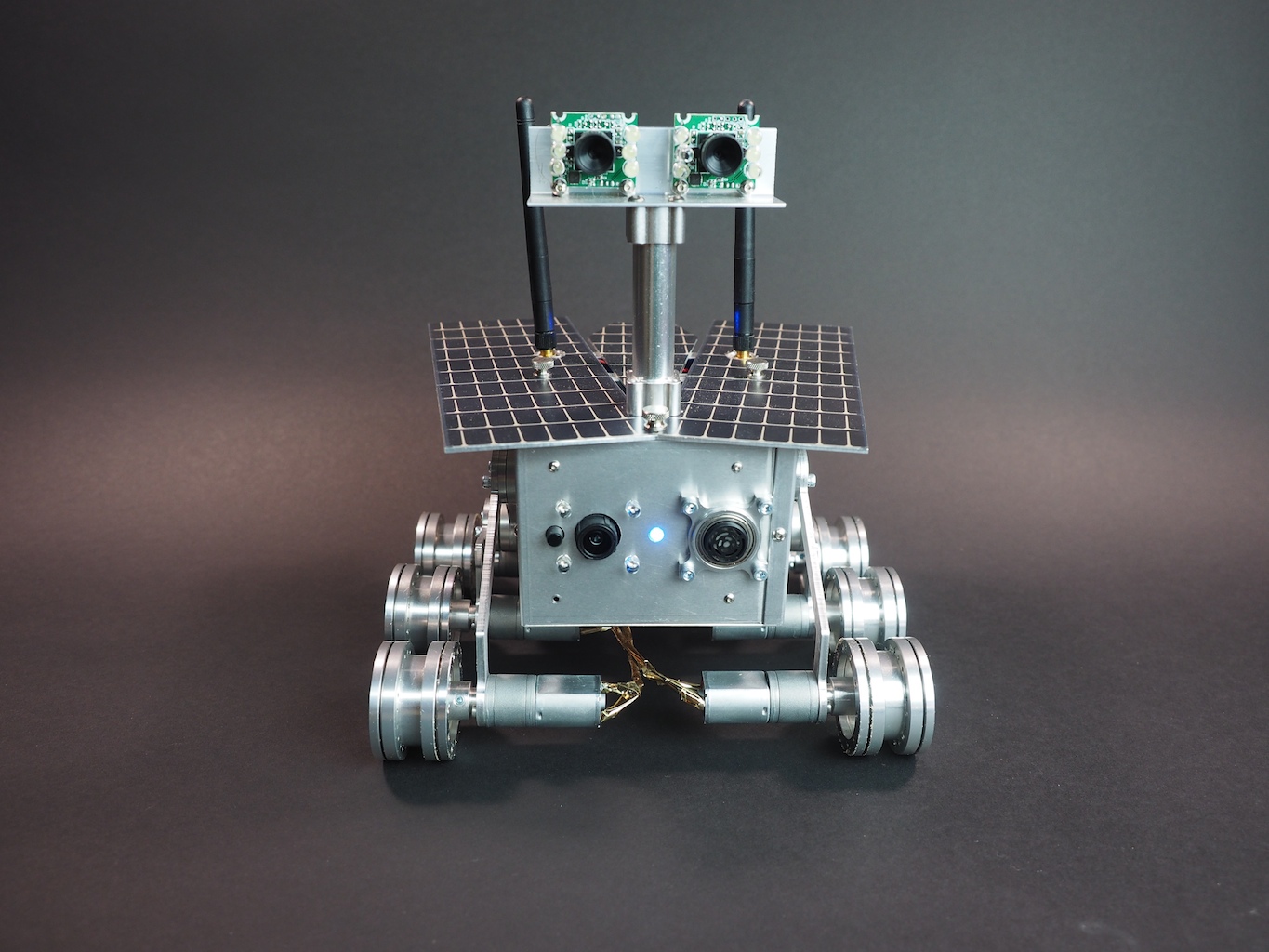
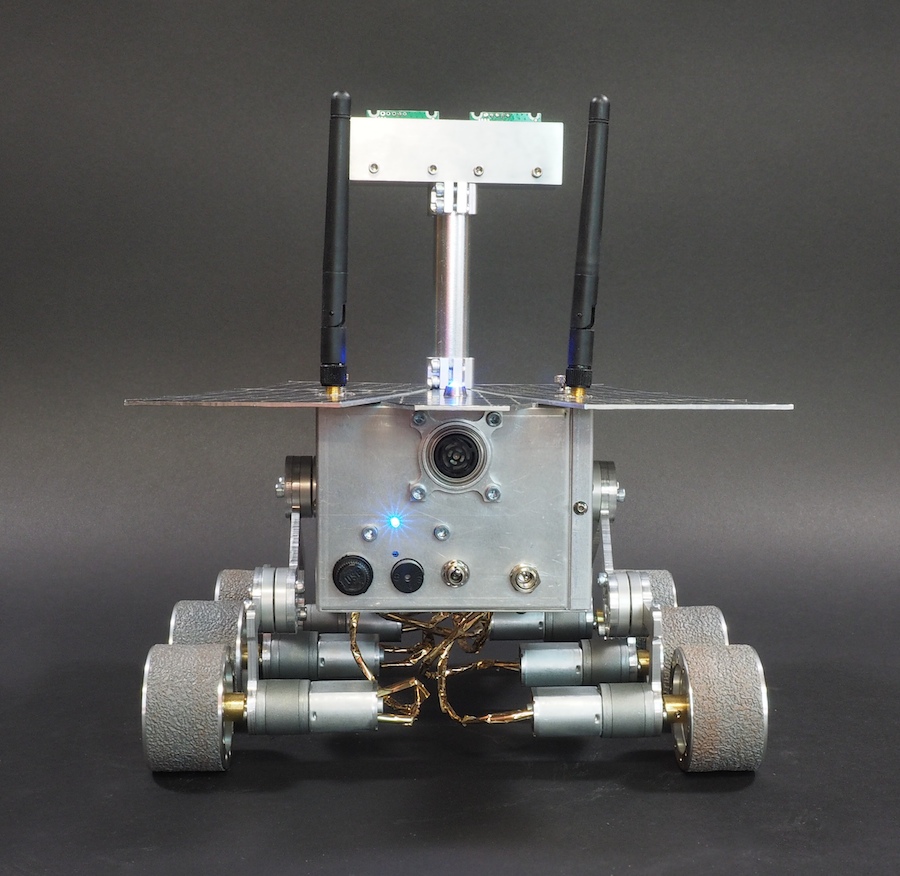
This is the back of the robot, where you can see the sonar, battery alarm LED, battery alarm speaker, charge jack, main power switch, and fuse.
We would like to thank our contacts in Malaysia for their excellent work on this project so far. They have been very good to work with. We look forward to helping them (from a distance) to get their robots setup and working at their location. We would also like to thank our part suppliers from servocity.com (hardware components), sparkfun.com (electronics), pololu.com (motors), dimensionengineering.com (motor controller), maxbotix.com (sonars), robotshop.com (electronics), all-battery.com, and mcmaster.com (metal and hardware), to name a few.