We’ve been working on a fun new robot we call Metalbot. Our goal was to build an autonomous rover with a unibody...
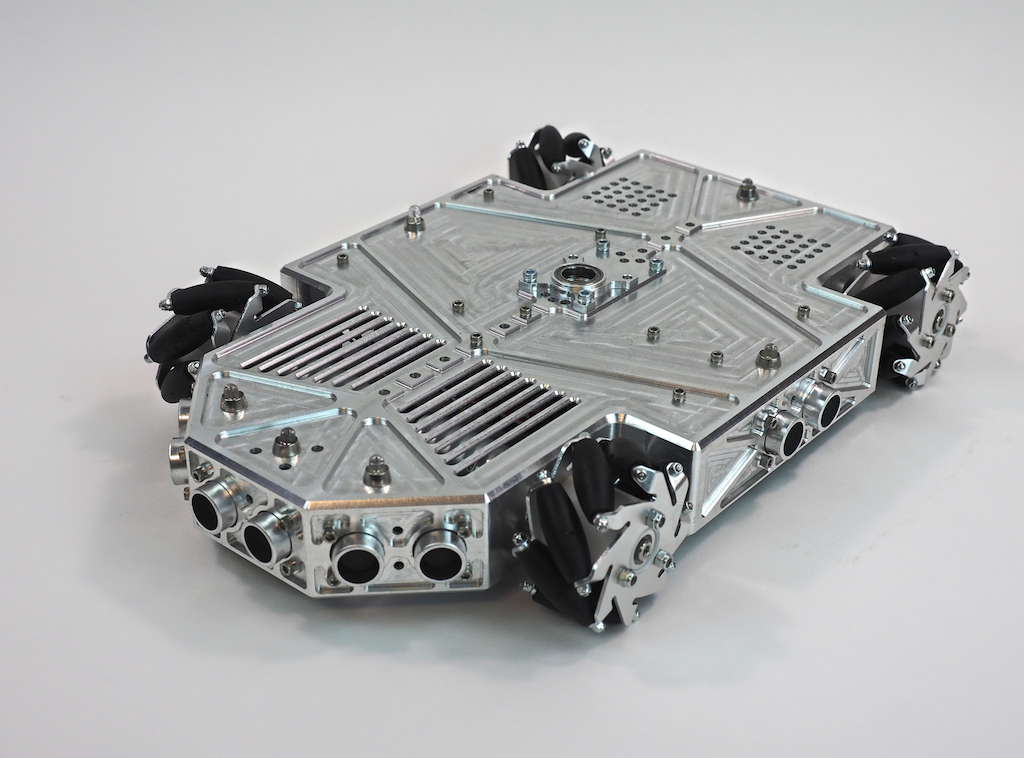
We’ve been working on a fun new robot we call Metalbot. Our goal was to build an autonomous rover with a unibody...
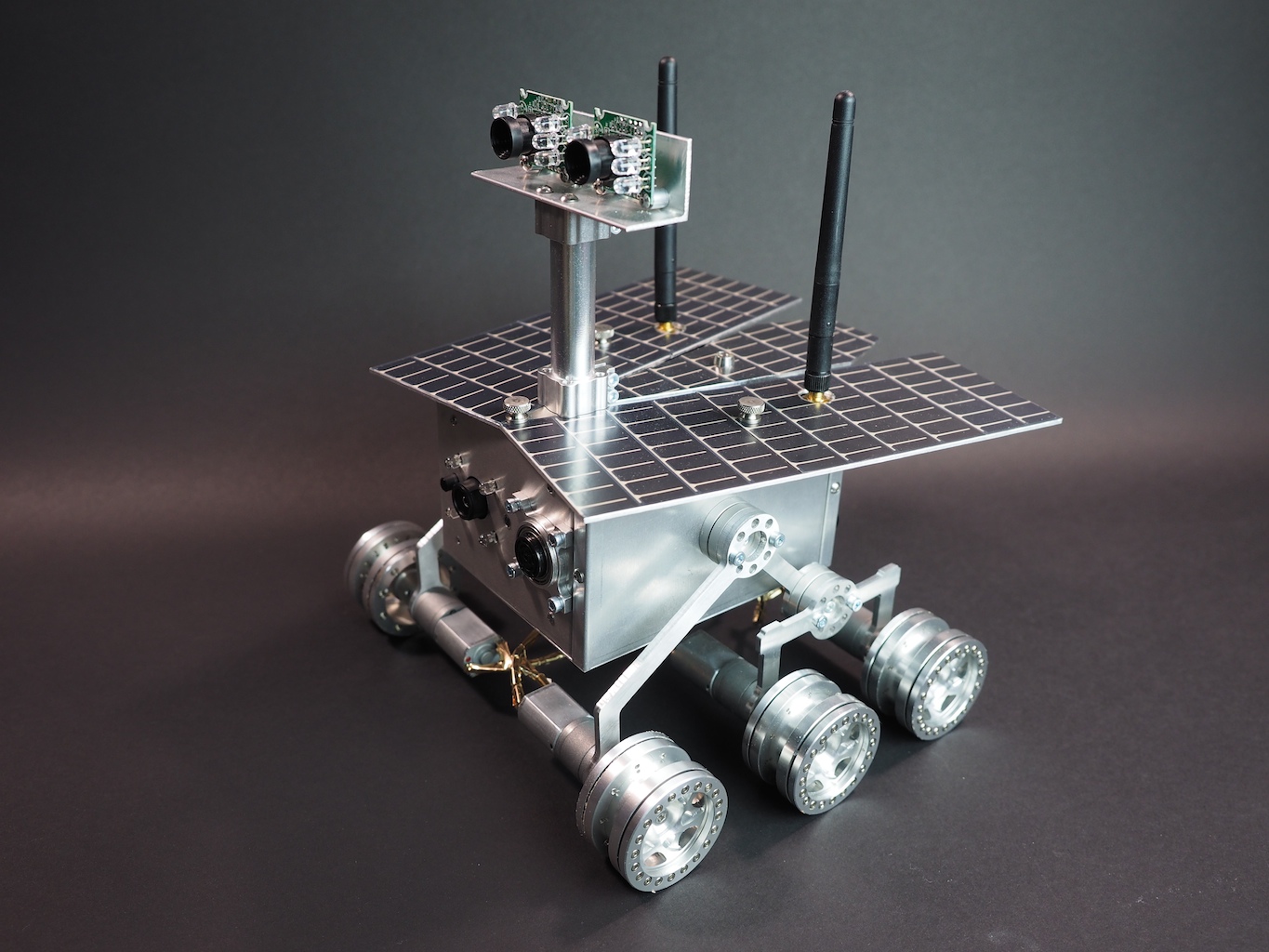
We have just completed and shipped two new Mini Mars Rover exhibits to Petrosains, The Discovery Centre in Kuala...
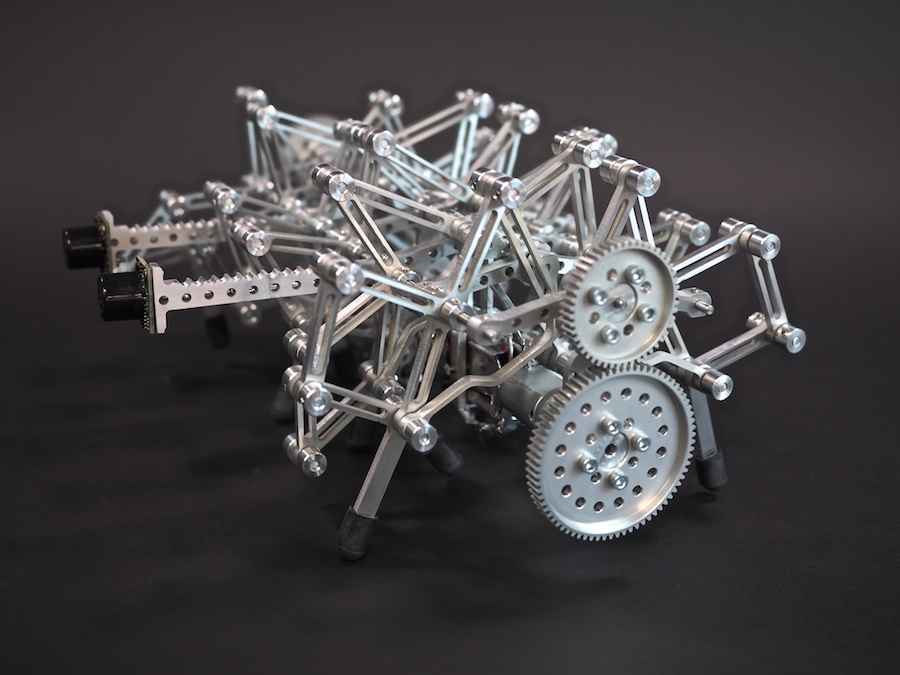
https://vimeo.com/104241178 We would like to introduce you to our newest robot. Her name is Alumini, which is...