
Here are some pictures as we continue work on our new Mars Rover.

I’m using the vertical mill to modify an aluminum part for the Mars Rover. Cutting, drilling, and machining metal is my favorite area of work now. I’m turning into a good machinist.

I’m using our mini drill press to drill holes onto the metal wheels in preparation for tapping the threads.

A new skill: I use our largest Milwaukee drill to tap 6-32 threads into the holes she drilled into metal wheels. The threaded holes will be used to secure the tread to the wheel (we don’t like glue). Tapping threads is very tricky (it’s very easy to snap the tapping bit), but she does a splendid job.
I’m mounting a side-firing sonar sensor on the the rocker-bogie suspension system. She’s done most of the mechanical construction on the robot.
I’m feeding wires through the chassis tube.
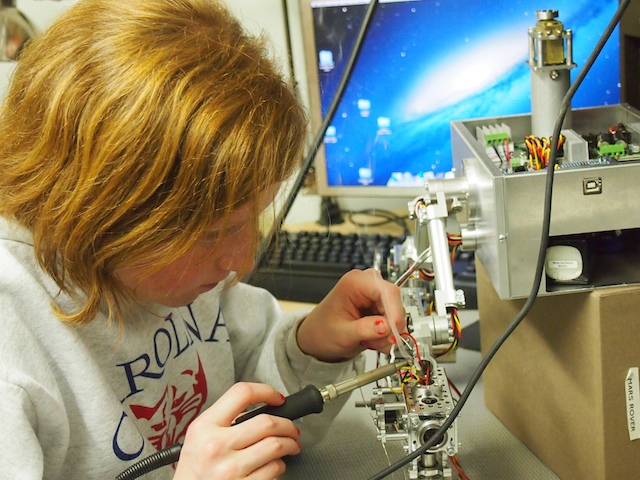
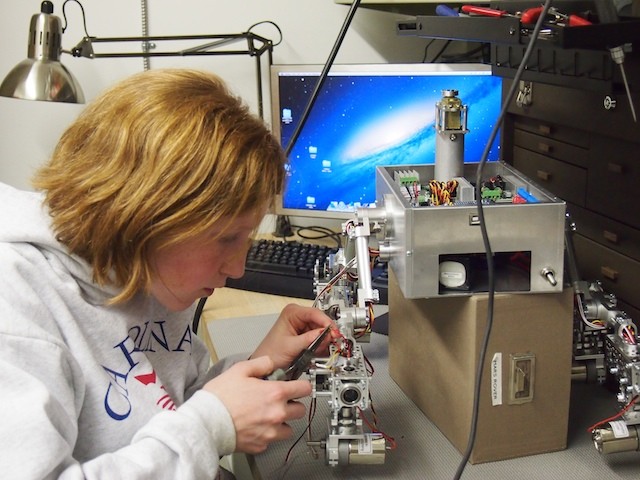
After fishing the wires through the chassis tubes, I solder the power, ground, and signal wires to the sonar sensors.
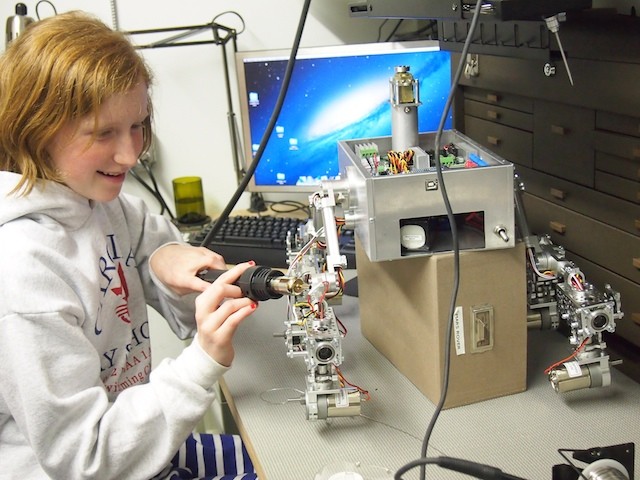
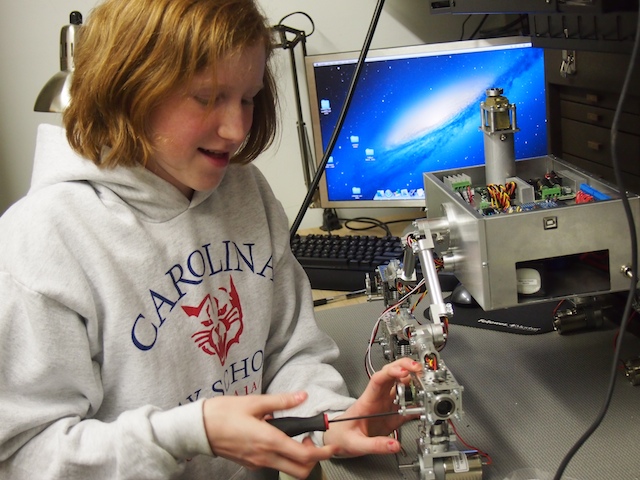
I use the electric heat gun to complete the heat shrinking on the wires she just soldered. (Red nail polish is optional when heat shrinking in our workshop, but always a plus!)

Slowly but surely, we’re making progress. We’ve completed all the wiring and soldering for the sonars, motors, and servos on the chassis, and we’ve assembled and installed the wheels. We sill need to complete the rover’s top, install the solar panels, build the mast head, and many other elements. Stay tuned.

Hello Beatty Robotics
which make and model of machine you use?
thank you very much
Where can I find such a nice rims?
I think it’s great to get kids involved in projects like this, but wearing gloves and long sleeves while operating machining equipment can be very dangerous.
Brandon: Yes, you’re right. Since these pictures were taken we have changed our policy on wearing gloves around the machining equipment. At first it was counter-intuitive to me for the girls not to wear gloves (it seemed safer to wear them), but I’ve since learned that it is considered best practice to NOT wear gloves.
Can you please share the source of those metal wheels you are using on the rover. They look pretty awesome.
Mohit, Thank you. We love the wheels, too. We screwed two of these wheels together to make them extra wide: http://www.andymark.com/Performance-s/101.htm