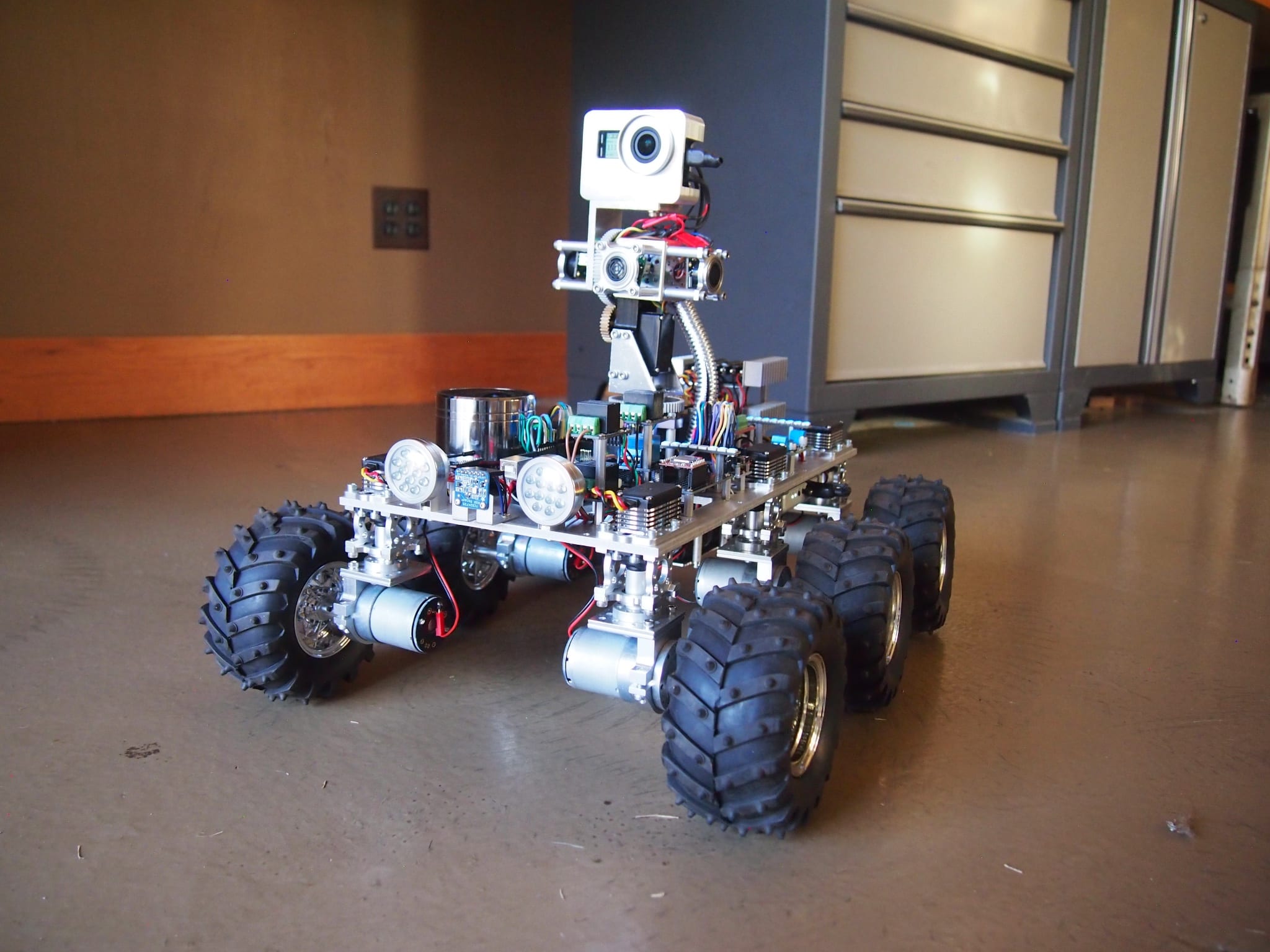
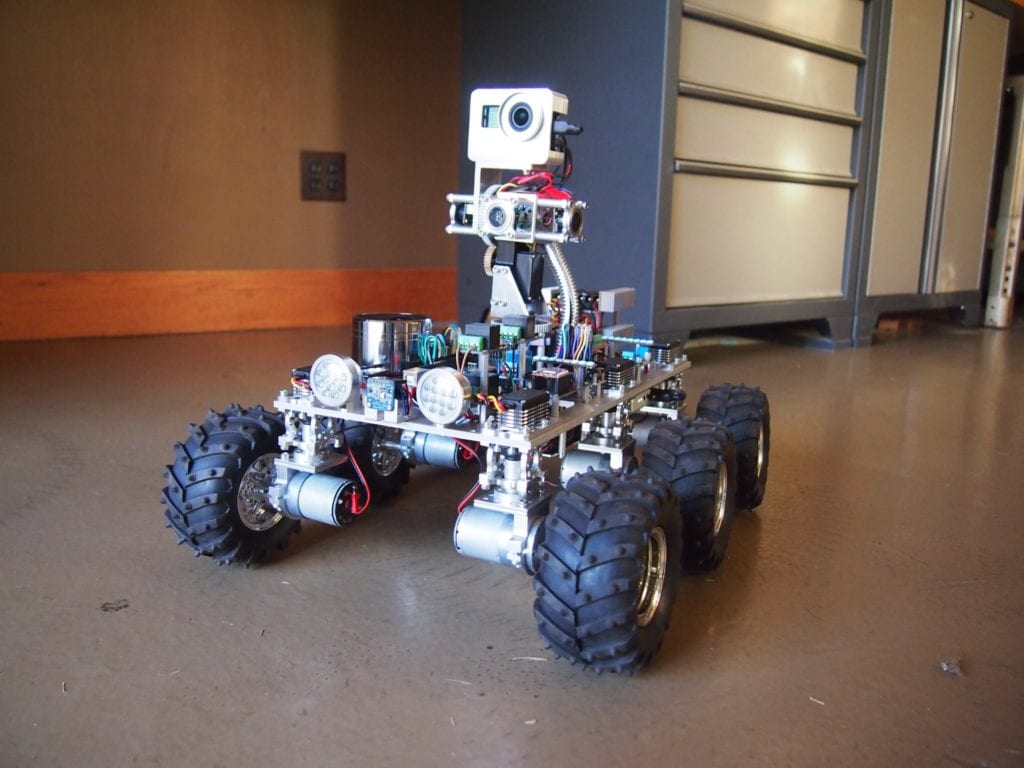
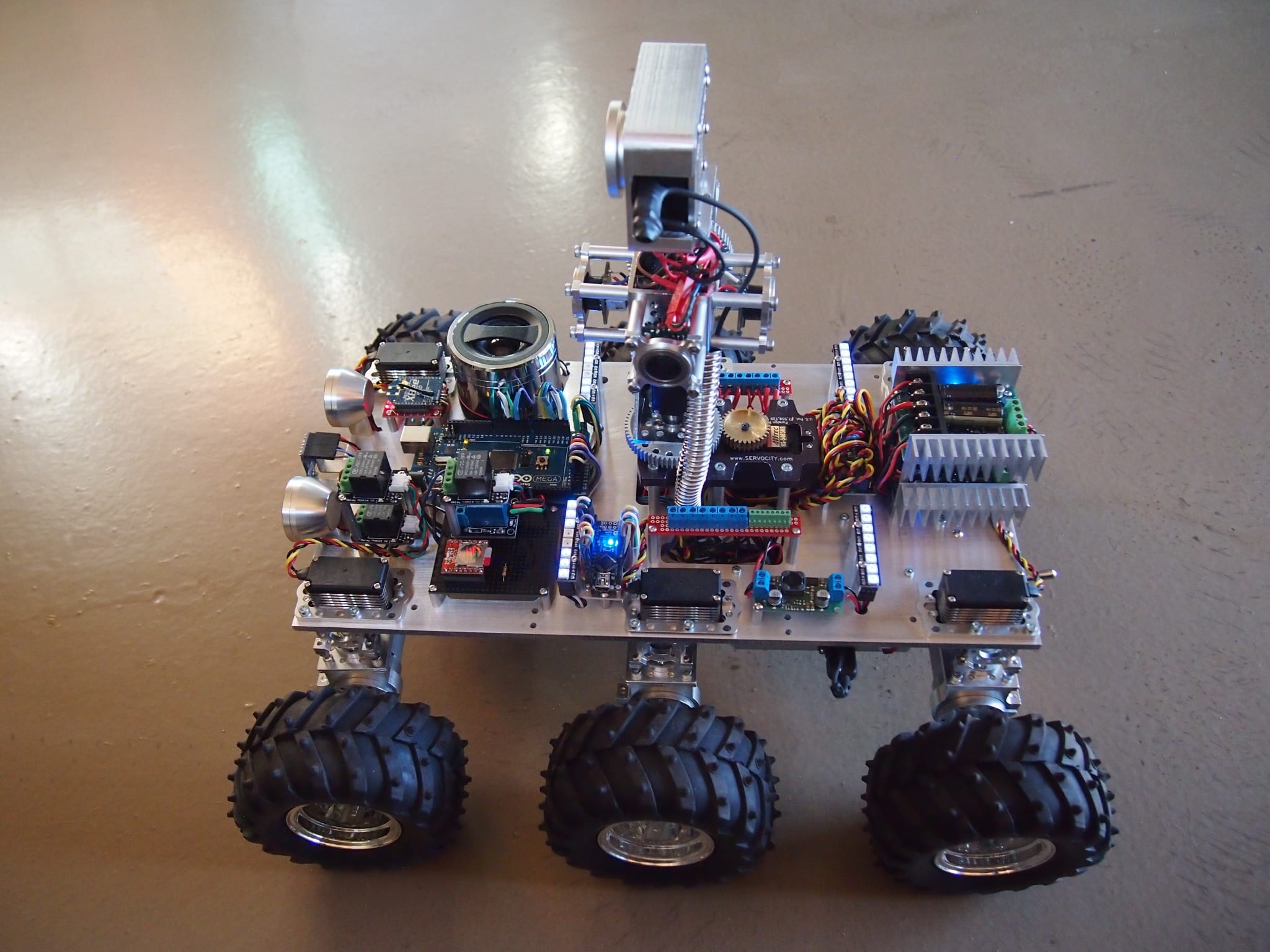
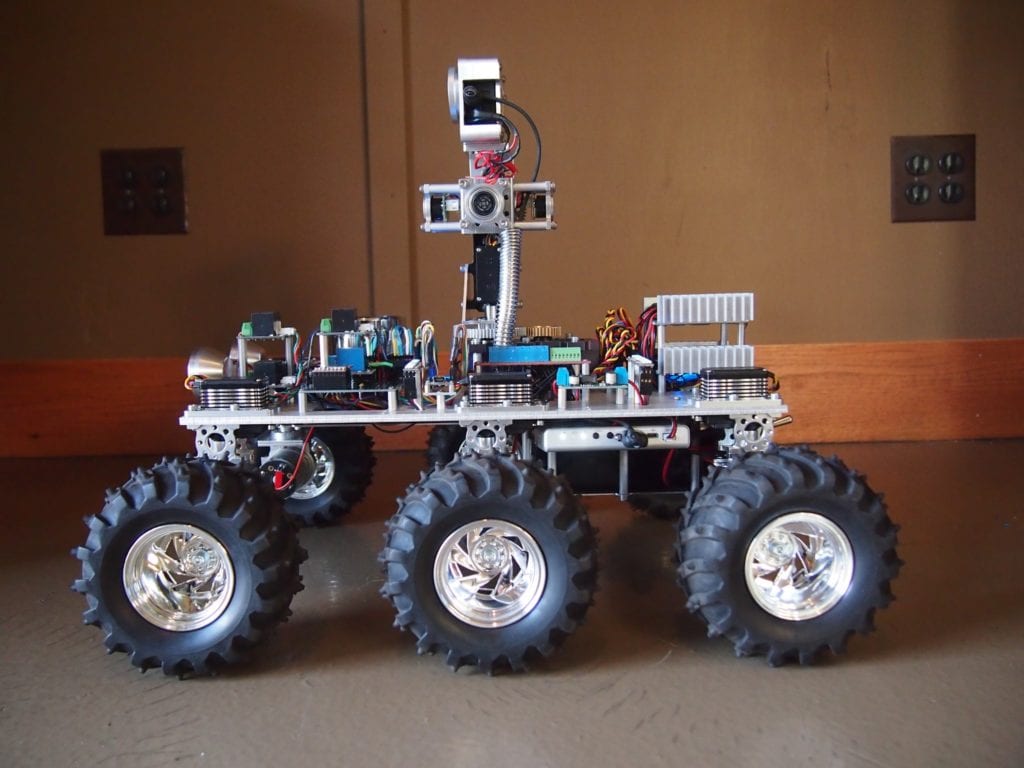
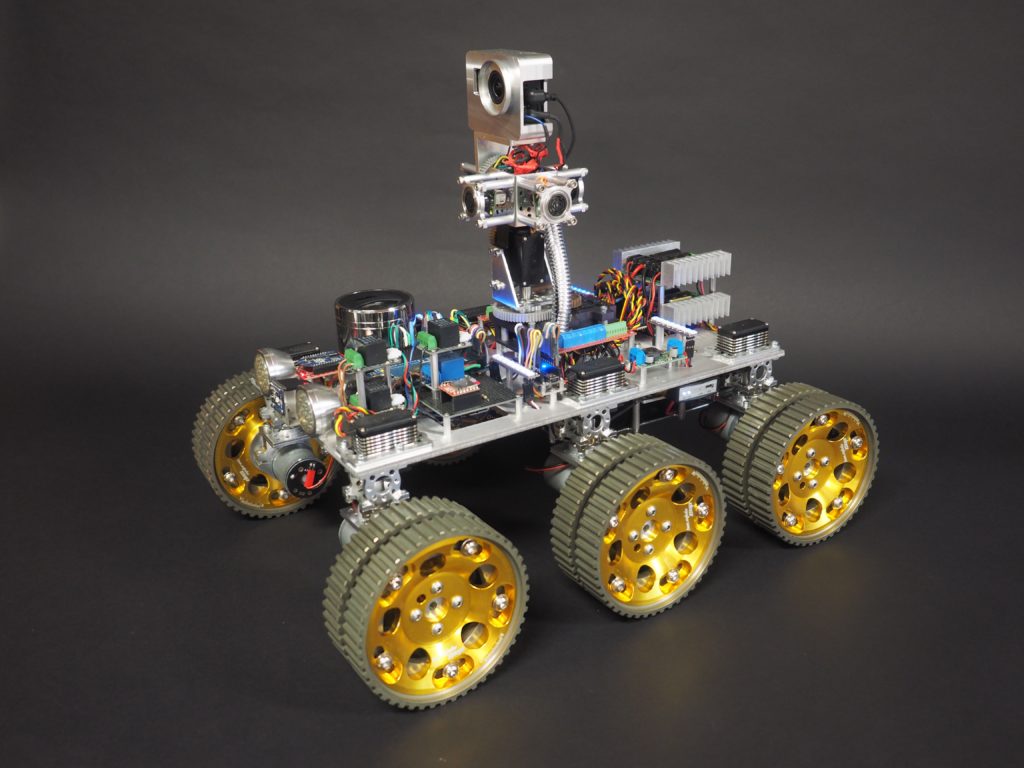
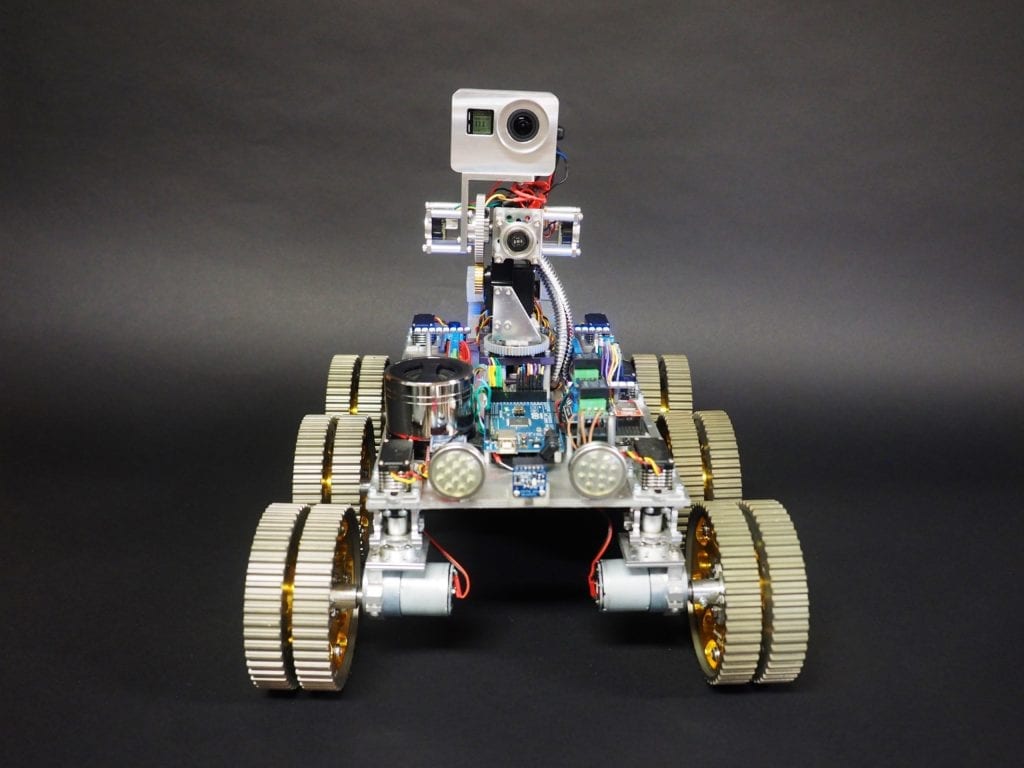
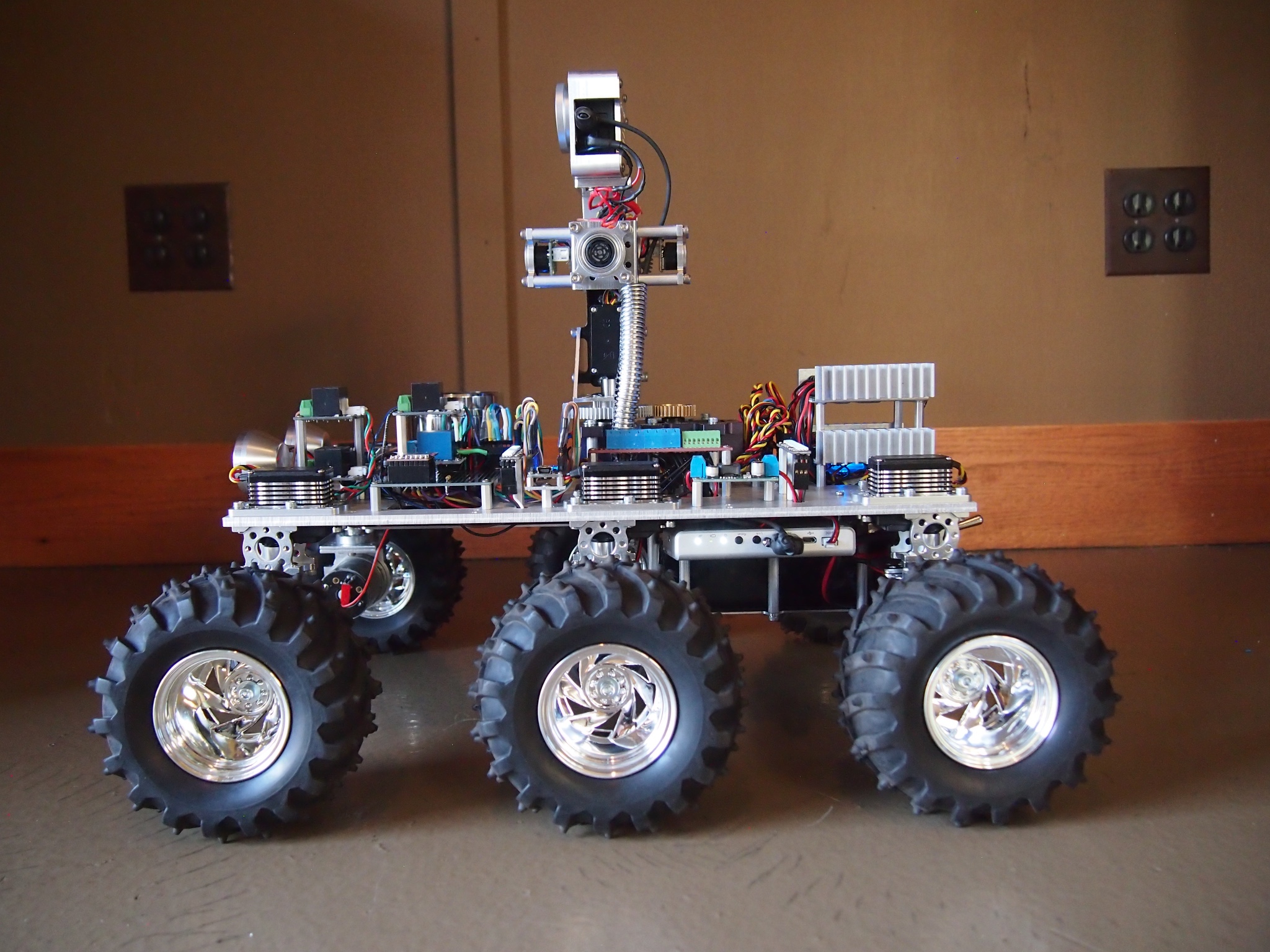
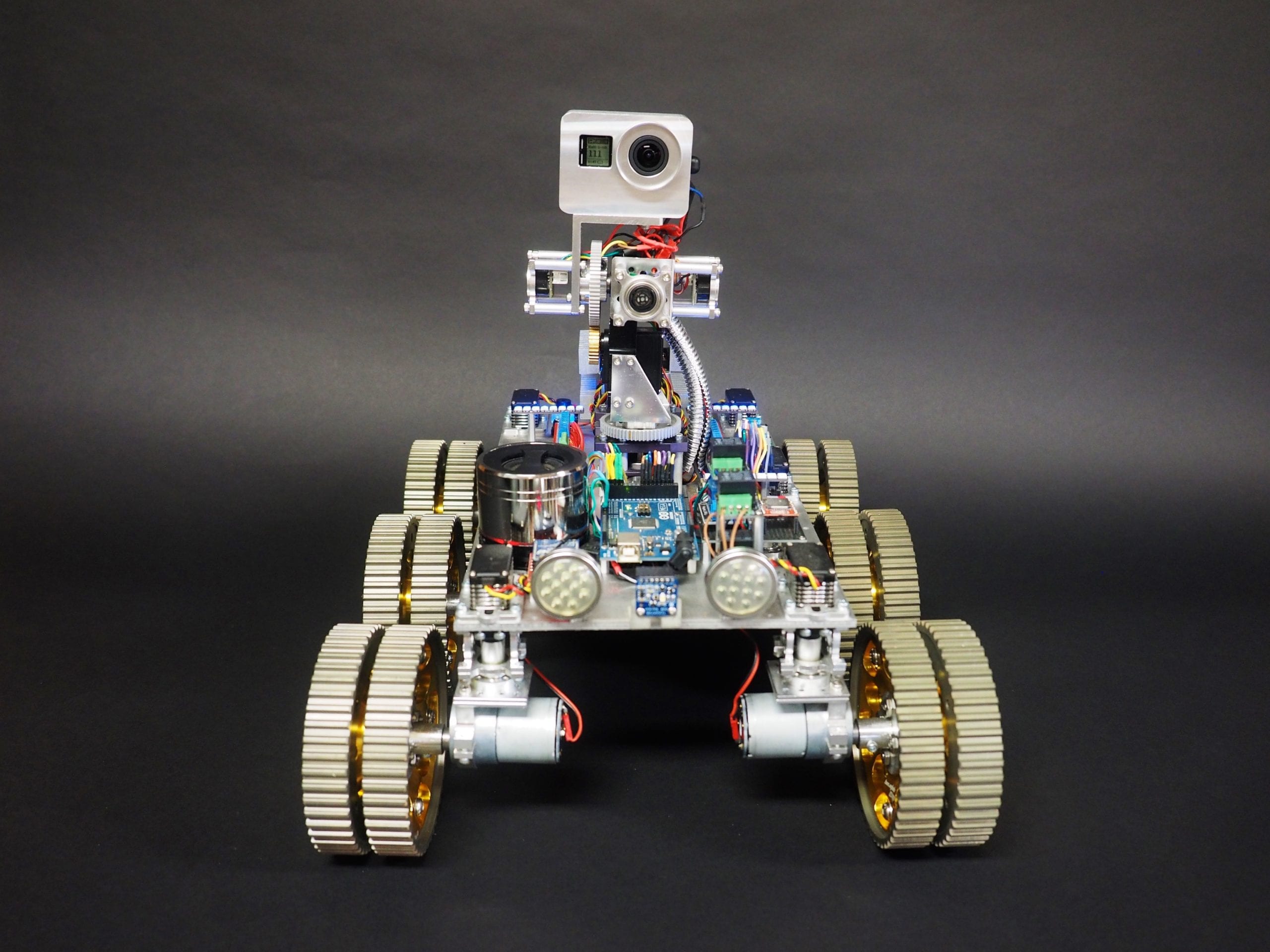
We have built a sturdy but compact 6-wheel-drive (6WD) rover for museum exhibits with limited space. In this video, we are testing its various steering methods (strafing, rotation, 2WS, differential, etc.). The main plate of this robot is a custom part that we machined. The servos, motors, motor mounts, servo blocks, camera turret, and many of the other components are from Actobotics. The brain of the robot is an Arduino Mega. It is also equipped with on-board sound/speaker, four Maxbotix obstacle sensors, a color sensor (at the front), and Neopixel RGB LED light strips. The turret holds a Hero 4 GoPro camera (in a custom case we machined), which transmits live HD video over a Connex video transmitter to a First-Person-View (FPV) Headset. The 7.4V LIPO battery is mounted under the main plate. The Remote Control (which is an Arduino-based device we created) communicates with the robot via xbee radios. We have designed this robot to support rubber tread wheels and metal wheels
6WD Rover Robot 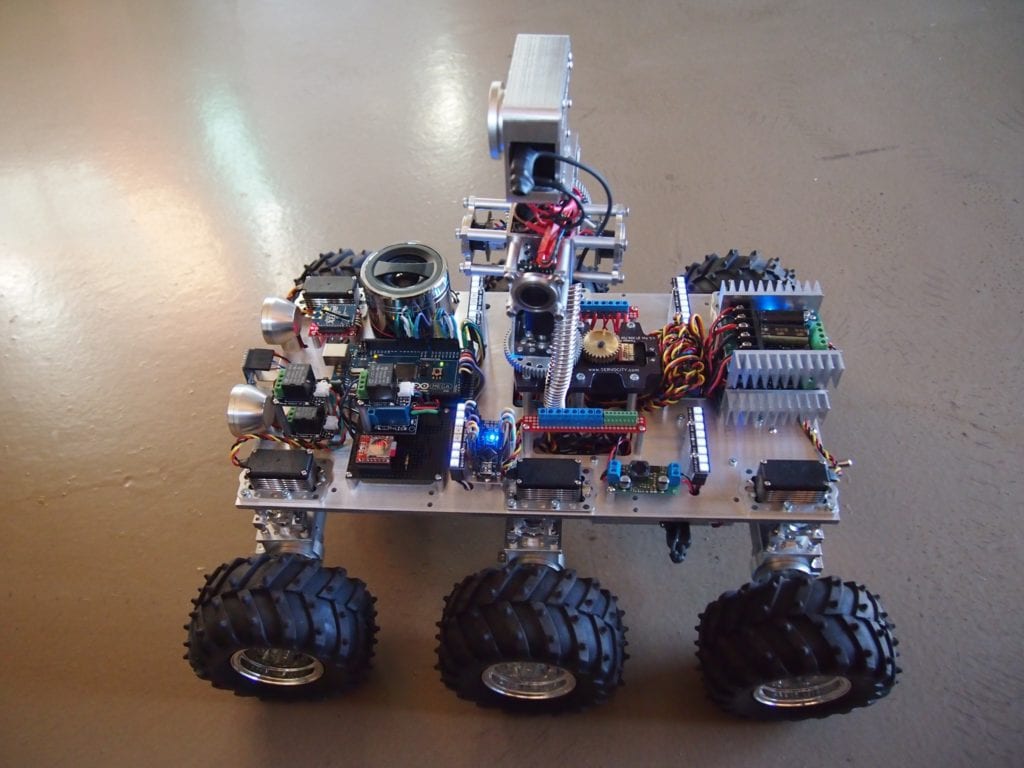
6WD Rover Robot
OLYMPUS DIGITAL CAMERA 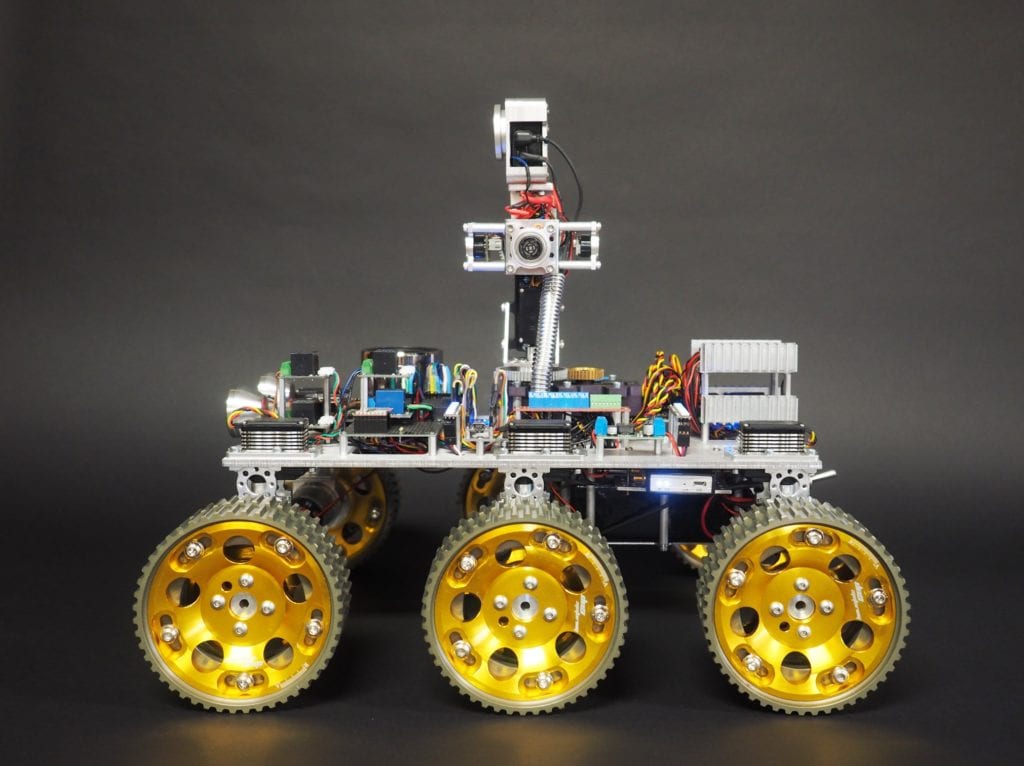


Posts on the construction of this robot:
- https://beatty-robotics.com/building-a-new-rover/
- https://beatty-robotics.com/custom-machined-main-plate-for-our-newest-rover/
- https://beatty-robotics.com/machining-a-wheel-hub/
- https://beatty-robotics.com/using-the-somo-ii-mp3-module-with-arduino/
- https://beatty-robotics.com/custom-case-for-gopro-camera/
- https://beatty-robotics.com/hacking-a-gopro-for-wired-remote-control/
- https://beatty-robotics.com/rover-challenge-work-in-progress/

Wow, wow and wow!
Hi all,
I have been interested in building my own 4WD or 6WD Rover for some time now. I plan to use a rock crawler as donor for the frame for the 4WD and go from there. And later on build a 6WD, to use as a autonomous vehicle to patrol the garden, etc.
I do have a question: did you program the different types of steering modes (strafe, rotation, etc) yourself or is it part of an open source program?
Keep up the excellent work all of you 🙂
Kind regards,
Anthony
Thank you, Anthony. Yes, we programmed the different types of steering modes ourselves.
Absolutely fantastic build as all your projects seem to be. Been checking on your projects on and off for a while.
Working on a couple of mine own vehicles. Recognize most of the parts from ServoCity, built a robot arm completely from ServoCity parts a while ago. Was wondering if you can tell me what servos you are using and what motors you used for the project. Are you using ones with quad encoders – just starting to get into odometry myself.
Thanks
Mike
Great build as all your builds are. You are very talented. Been checking your site on and off for a while. Can you share what servos and what motors you are using. Built a couple rovers myself that does obst avoid, rc controlled and waypoint nav all in one. Are you using odometry with the rover – did not notice any encoder wires coming out of the motors.
Thanks
Mike
The servos are Hitec HS-7960TH. The motors are standard spur gear motors from Servocity (https://www.servocity.com/motors-actuators/gear-motors/standard-duty-gear-motors/standard-spur-gear-motors). We aren’t using encoders on this robot.
Hi there! This is a unique project. I’ve been looking for a project like this for a very long time. A very talented family. May I ask you to give a bit more info on what and how many motor controllers you used to control 6 DC motors and 6 servos? How did you connect them to Arduino? Unfortunately there are almost no components available in the county I live in and shippint is quite expensive, so I would like to know for sure which ones I need before I order them on web.
I would highly appreciate any information you are able to provide!
Thank You!
Thank you. The motor controllers are Sabertooth from Dimension Engineering. The servo controller is a Maestro from Pololu Robotics.
Thank you!